Изобретение относится к машиностроению и может быть использовано в шпиндельных опорах металлорежующих станков.
Цель улучшение нагрузочных характеристик и расширение функциональных возможностей опор.
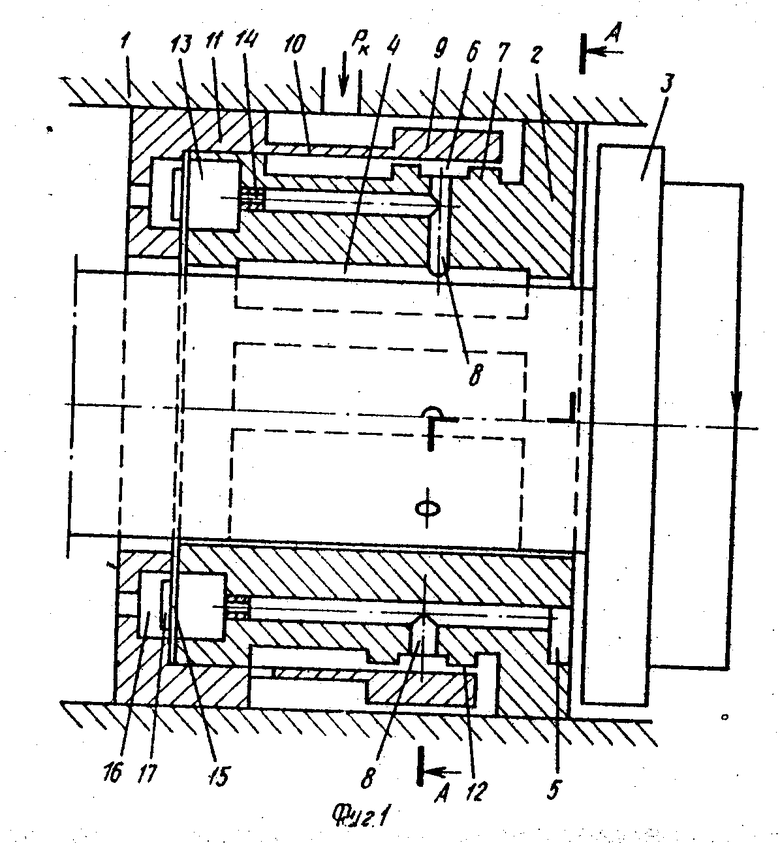
На фиг.1 изображена предлагаемая гидростатическая опора, продольный разрез; на фиг.2 сечение А-А на фиг.1.
Гидростатическая опора содержит корпус 1, в котором неподвижно установлена втулка 2, охватывающая с рабочим зазором вал 3. На внутренней поверхности втулки 2 выполнены четыре несущих кармана 4, воспринимающих радиальную нагрузку, а на переднем торце четыре секторных несущих кармана 5, воспринимающих осевую нагрузку. На наружной поверхности втулки 2 выполнены восемь узких приемных камер 6, ограниченных с обеих сторон кольцевыми поясками 7 и сообщающихся с соответствующими несущими карманами 4, 5 посредством соединительных каналов 8. На втулке 2 закреплено подвижное кольцо 9, играющее роль регулятора расхода смазки оно упруго соединено плоскими пружинами 10 с фланцем 11. Кольцо 9 имеет возможность радиального перемещения в пределах кольцевого зазора входных щелевых дросселей 12, образованных внутренней поверхностью кольца 9 и поясками 7 приемных камер 6. На заднем торце втулки 2 выполнены восемь непроточных резонаторных камер 13, сообщающихся с соединительными каналами 8 через демпфирующие дроссели 14, установленные на входе в камеры 13. Одна из стенок каждой резонаторной камеры 13 образована кольцевой упругой мембраной 15, которая прижата фланцем 11 к торцу втулки 2. Фланец 11 имеет отверстия 16 напротив каждой резонаторной камеры 13, в которых расположены, установленные на мембране 15, тензорезисторы 17. Каждая из пар тензорезисторов 17, установленных в отверстиях 16, напротив оппозитных резонаторных камер 13, соединена в мостовую схему, а концы соединительных электрических проводов введены на корпус 1 к усилительно-регистрирующей аппаратуре. Вместо тензорезисторов 17 возможно применение индуктивных, емкостных, пьезоэлектрических и др. датчиков, регистрирующих прогиб мембраны 15.
Гидростатическая опора работает следующим образом.
Смазка, нагнетаемая источником давления Рн через входные щелевые дроссели 12, поступает в приемные камеры 6, а из них по соединительным каналам 8 через демпфирующий дроссель 14 в резонаторные камеры 13 и в несущие карманы 4 и 5.
При нагружении вала 3 консольно приложенной силой увеличивается давление в нагруженных и уменьшается в разгруженных несущих карманах 4, 5 и в соответствующих им приемных камерах 6. Это приводит к упругому смещению подвижного кольца 9. Зазор входного щелевого дросселя 12 в зоне нагруженного кармана увеличивается, что обеспечивает дополнительное поступление смазки в нагруженный карман. В разгруженном кармане приток смазки уменьшается. Вал 3 при этом сместится в направлении, противоположном направлению действия нагрузки. Изменения давления в карманах 4, 5 и в связанных с ними через демпфирующие дроссели 14 резонаторных камерах 13 изменяет прогиб соответствующих мембран 15, который регистрируется установленными на них тензорезисторами 17 или другими датчиками. Сигналы датчиков после усиления и соответствующей обработки используются для определения значений радиальных и осевой составляющих нагрузки, а также изгибающего момента, приложенного к валу, которые будут пропорциональны изменению давлений в несущих карманах.
Демпфирующие дроссели 14 обеспечивают динамическое взаимодействие объемов смазки в несущих карманах и приемных камерах с одной стороны и в резонаторных камерах с другой. При оптимальном выборе объемов карманов и камер, а также сопротивления демпфирующего дросселя удается обеспечить необходимое динамическое качество подшипника-преобразователя в режиме отрицательной податливости.
Гидростатическая опора позволяет получить больший адаптивный диапазон нагрузочной характеристики. В этом диапазоне эксцентриситет вала имеет отрицательное значение, т. е. направлен противоположно действующей нагрузке. В адаптивном диапазоне нагрузок подшипник позволяет компенсировать прогиб вала, создаваемый его изгибом, и упругие деформации других звеньев. Это обстоятельство существенно для шпиндельных узлов металлорежущих станков. Применение адаптивных гидростатических подшипников позволяет повысить точность обработки в 1,5-2,5 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2013 |
|
RU2537217C2 |
| Адаптивный подшипник скольжения | 1988 |
|
SU1551860A1 |
| Радиально-упорная гидростатическая опора | 1989 |
|
SU1668763A1 |
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
| Гидростатическая опора | 1989 |
|
SU1691609A1 |
| Гидростатическая опора | 1985 |
|
SU1364785A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2017 |
|
RU2654453C1 |
| Гидростатический подшипник | 1987 |
|
SU1530853A1 |
| Опора скольжения | 1987 |
|
SU1599596A1 |
| РЕГУЛЯТОР ДЛЯ ГИДРОСТАТИЧЕСКИХ ОПОР | 2011 |
|
RU2487280C1 |

Изобретение относится к машиностроению и может быть использовано в шпиндельных опорах металлорежущих станков. Цель изобретения - улучшение нагрузочных характеристик и расширение функциональных возможностей опор. Гидростатическая опора содержит вал и втулку с несущими карманами. Расход смазки регулируется с помощью подвижной втулки, соединенной с гибкой мембраной, на которой установлены тензодатчики. Гидростатическая опора имеет непроточные резонаторные камеры, которые связаны с регулятором смазки через дросселирующие жиклеры. Введение резонаторных камер улучшает нагрузочные характеристики. Гидростатическая опора может изменяться также для целей измерения. 1 з. п. ф-лы, 2 ил.
| Гидростатическая опора | 1985 |
|
SU1364785A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
