(54) ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь линейных перемещений | 1975 |
|
SU585399A1 |
| Преобразователь линейных перемещений | 1986 |
|
SU1317273A1 |
| Индукционный преобразователь линейных перемещений | 1986 |
|
SU1366869A1 |
| Реостатный преобразователь линейных перемещений | 1982 |
|
SU1019219A1 |
| Трансформаторный преобразовательлиНЕйНыХ пЕРЕМЕщЕНий | 1979 |
|
SU805377A1 |
| Датчик параметров движения | 1977 |
|
SU690386A1 |
| Электромагнитный преобразователь для неразрушающего контроля | 1990 |
|
SU1838781A3 |
| Индукционный преобразователь линейных перемещений | 1988 |
|
SU1516751A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 1991 |
|
RU2011223C1 |
| Преобразователь относительного перемещения узлов станка | 1978 |
|
SU744218A1 |
1
Изобретение относится к области электроизмерительной техники и может быть использовано при измерении линейных перемещений.
Известны преобразователи линейных перемещений, содержащие линейку с измерительной обмоткой и обмотку возбуждения, расположенную на магнитопроводе 1.
Известные преобразователи в ряде случаев не обеспечивают требуемой точности.
Наиболее близким по технической сущности к изобретению является преобразователь линейных перемещений, содержащий линейку, расположенную на ней петлевую плоскую измерительную обмотку и движок с обмоткой возбуждения, охватывающий линейку 2.
Недостатком известного преобразователя является недостаточная точность вследствие искажения магнитного поля в рабочей зоне движка при наличии вблизи движка ферромагнитных деталей.
Целью изобретения является повышение точности преобразователя.
Это достигается тем, что движок преобразования выполнен наборным из призматических элементов, обмотка возбуждения выполнена в виде последовательно соединенных плоскопараллельных секций, расположенных на поверхностях призматических элементов в плоскостях, перпендикулярных наружным боковым граням элементов, а шаг обмоток пропорционален площади сечения соответствующего элемента.
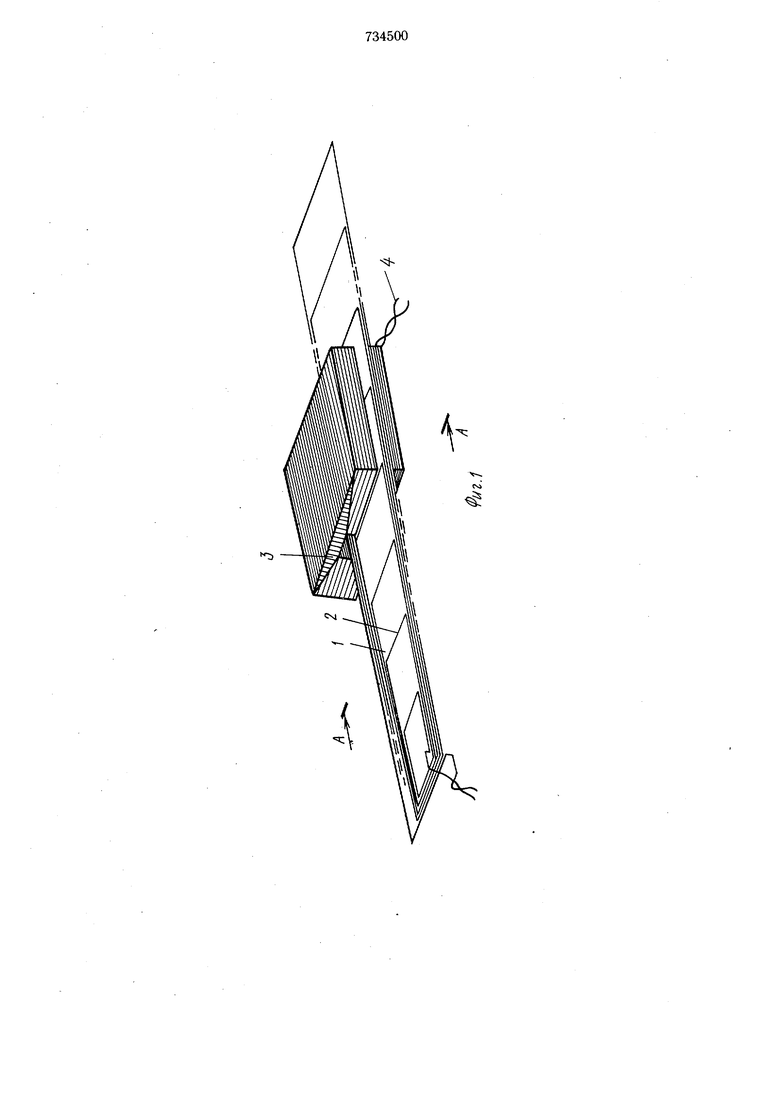
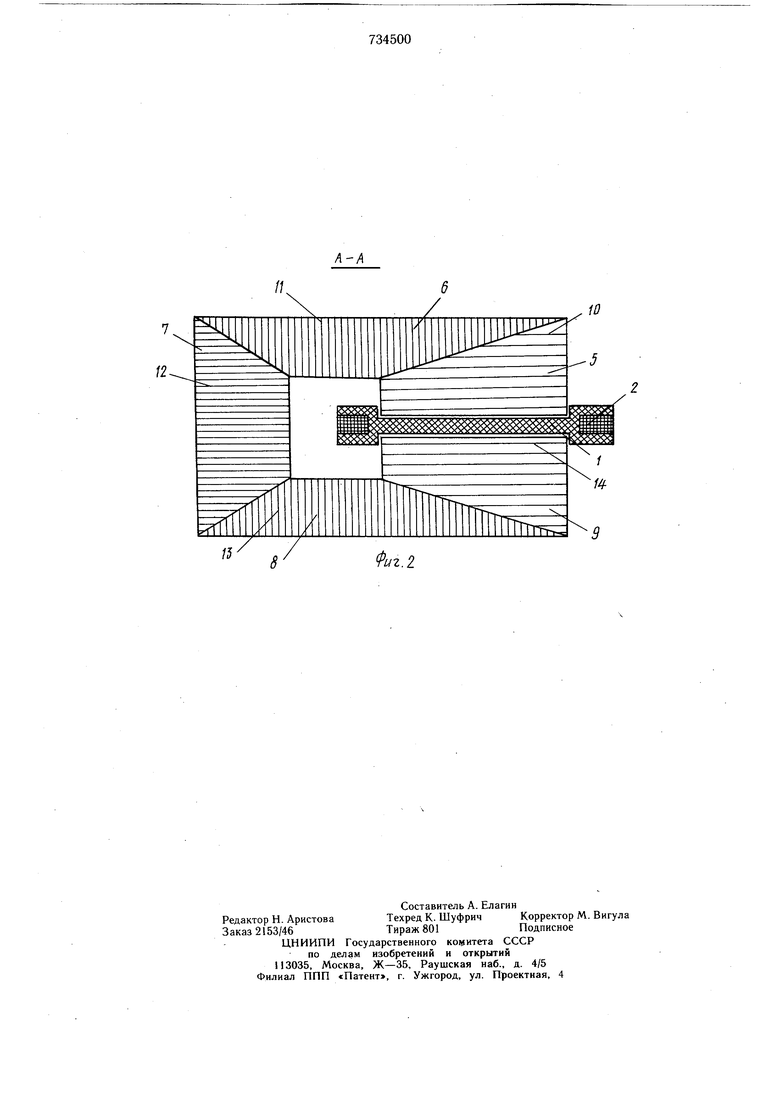
На фиг. 1 изображен общий вид устройства; на фиг. 2 - разрез А-А на фиг. 1.
10
Преобразователь линейных перемещений содержит линейку 1, расположенную на ней плоскую петлевую измерительную обмотку 2, охватывающий линейку 1 движок 3 и расположенную на нем обмотку возбуждения 4. Движок 3 выполнен в виде набора самостоятельных объемных призматических элементов 5, б, 7, 8, 9. В зазоре между элементами 5-9 размещена линейка 1. На поверхностях элементов 5-9 в плоскостях,
20 перпендикулярных наружной боковой грани элемента, уложены плоскопараллельные витки, образующие секции 10, 11, 12, 13, 14 обмотки возбуждения 4, соединенные последовательно между собой. Обмотка 10 при питании ее переменным током создает магнитный поток 0, JUAloHiS4 jMjUow Iol Si KmSi, rAe//r,jWo- магнитная проницаемость; Н - напряженность магнитного поля; S - площадь продольного сечения; п - число витков на единицу длины; 1о- амплитуда тока; со - круговая частота; j - мнимая единица; t - время; k - размерный коэффициент. На всей поверхности стыкового соединения элементов 5-9 происходит поворот вектора магнитной индукции на угол стыковки этих элементов.% Так как магнитные потоки в обмотках каждого элемента равны, то для магнитных потоков, создаваемых секциями 10-14, справедливо равенство: Ф2 Фз - Ф1,(1) так как Фз Кпз5з и т. д., то, подставляя эти значения в равенство (1), получим: ...njS,.(2| Шаг укладки витков на элементах 6, -Й7 «t Подставляя эти значения в последнее равенство (2), получим: |а. Si k/3 Si vSi т. е. шаг обмотки элементов пропорционален продольным сечениям элементов. Шаг витков обмотки элемента 10 задают равным толщине линейки 1, а во всех других обмотках он пропорционален продольным сечениям соответствующих объемных элементов. Рассеивание магнитного потока исключается, так как стыковка объемных элементов происходит по верщинам стыка, и выполнено условие (3). При установке преобразователя в рабочее положение обмотка возбуждения 4, соединенная с источником питания переменного тока, наводит ЭДС в витках измерительной обмотки 2, соединенной с цепью управления контролируемого объекта. Перемещение движка 3 вдоль линейки 1 вызывает изменение напряжения в измерительной обмотке 2, прямо пропорциональное линейному перемещению, так как один и тот же магнитный поток, создаваемый обмоткой возбуждения 4, при перемещении приходит в сцепление с различным числом витков измерительной обмотки. Использование предлагаемого преобразователя в системах контроля позволит увеличить точность измерений за счет создания однородного магнитного поля, наводящего ЭДС в витках измерительной обмотки. Формула изобретения Преобразователь линейных перемещений, содержащий линейку, расположенную на ней петлевую плоскую измерительную обмотку и движок с обмоткой возбуждения, охватывающий линейку, отличающийся тем, что, с целью повыщения точности, движок выполнен наборным из призматических элементов, обмотка возбуждения выполнена в виде последовательно соединенных плоскопараллельных секций, расположенных на поверхностях призматических элементов в плоскостях, перпендикулярных наружным боко-, вым граням элементов, а шаг обмоток пропорционален площади сечения соответствующего элемента. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 373531, кл. G 08 С 9/04, 1973. 2. Авторское свидетельство СССР № 585399, кл. G 01 В 7/00, 1975 (прототип).
