Изобретение относится к аналого-графической вычислительной технике с ручным управлением и может быть использовано в качестве спецвычислителя в ультразвуковой дефектоскопии, в частности для определения параметров контроля при дефектоскопии сварных швов призматическими преобразователями и для определения местоположения дефекта в сечении сварного шва.
Известно вычислительное устройство для определения координат дефекта, содержащее корпус прямоугольной формы с нанесенными на него ортогональными шкалами расстояний по оси Х и оси Y и наклонной линией, соответствующей траектории ввода ультразвукового (УЗ) луча в контролируемое изделие в пределах прямого участка УЗ луча. В корпусе выполнен также паз, по которому с помощью фиксирующего (стопорного) винта перемещается вдоль оси X движок, на котором нанесена наклонная ломаная линия, соответствующая траектории однократно и частично отраженного УЗ луча в контролируемом изделии.
В корпусе имеется также прямоугольный вырез и второй паз, с помощью которых устанавливается ограничитель, определяющий местоположение УЗ призматического преобразователя относительно корпуса устройства таким образом, чтобы точка ввода УЗ преобразователя совпадала с началом наклонной кривой на корпусе устройства, когда в процессе контроля при обнаружении дефекта для определения его координат вычислительное устройство прикладывается к УЗ преобразователю, зафиксированному на поверхности контроля (I. Krautkramer, H. Krautkramer "Werkstoffprufung mit Ultraschall" Springer-Verlag, Berlin, 1966, s. 380-381, abb 3171-3172.
Данное устройство позволяет легко определять координаты - расстояние до дефекта - X и глубину залегания Y дефекта в изделии и определять такие параметры, как зоны перемещения УЗ преобразователя при контроле прямым и однократно отраженным лучом, а также каким (прямым или однократно отраженным) лучом берется дефект.
Однако данное вычислительное устройство не позволяет легко и наглядно определить возможность контроля сечения сварного шва выбранным типом УЗ преобразователя, выбирать преобразователь с оптимальным углом ввода, а также наглядно определить в каком месте по отношению к границам сечения сварного шва находится дефект (внутри сечения шва, на границе зоны сплавления или в основном металле за зоной сплавления).
Наиболее близким техническим решением к предлагаемому является вычислительное устройство для определения координат дефекта и параметров контроля при контроле призматическими преобразователями, содержащее корпус прямоугольной формы с нанесенными на него горизонтальными шкалами координат дефекта: расстояния до дефекта по поверхности X и глубины залегания дефекта - Y, в пазах которого размещены два движка с вспомогательными шкалами, и два бегунка с визирными линиями.
Недостатками данного устройства являются отсутствие наглядности и сложность определения местоположения дефекта в сварном шве, сложность оценки возможности контроля выбранным преобразователем всего сечения сварного шва и сложность оценки зон перемещения преобразователя и соответственно определения зон зачистки околошовной поверхности контролируемого объекта.
Указанные недостатки устраняются в предлагаемом вычислительном устройстве.
Целью предлагаемого устройства является расширение класса решаемых задач и повышение быстродействия вычислительного устройства при определении параметров контроля и местоположения дефекта в сечении шва, в том числе оценка возможности контроля сечения сварного шва выбранным УЗ-преобразователем и определение ширины зон зачистки околошовной поверхности.
Цель достигается заявляемой конструкцией устройства.
Устройство содержит прямоугольный корпус. На корпусе нанесены ортогональная масштабная координатная сетка и вертикальная шкала расстояний по координате Y. На корпусе выполнены две пары продольных пазов. В одних пазах (центральных) установлен перемещаемый вдоль корпуса по оси X центральный движок, на котором под заданным углом ввода, определяемым углом призмы УЗ преобразователя, нанесена линия траектории распространения УЗ луча как однократно отраженного, так и дополнительно падающего (прямого). В других пазах установлен дополнительный движок, содержащий шкалу расстояний, который позволяет фиксировать положение точки ввода УЗ преобразователей с различной стрелой относительно начала масштабной координатной сетки и осуществлять отсчет расстояний по координате X от точки ввода или передней грани УЗ преобразователей. На корпус вычислительного устройства надет бегунок новой конструкции, который можно перемещать вдоль корпуса устройства в направлении перемещения центрального движка (по оси X).
Особенности конструкции бегунка заключаются в следующем: корпус бегунка охватывает корпус вычислительного устройства, т. е. выполнен замкнутым по периметру поперечного сечения корпуса устройства и имеет прямоугольное окно с нанесенными на двух ортогональных сторонах рамки окна масштабными шкалами по осям X и Y с общей начальной точкой отсчета;
в корпусе бегунка расположена замкнутая прозрачная гибкая лента, охватывающая поперек корпус вычислительного устройства и перемещаемая между боковыми сторонами окна бегунка относительно корпуса бегунка. На ленте изображены возможные стандартные (типовые) формы разделки кромок свариваемых деталей и осевая визирная линия;
в корпус бегунка введен блок протяжки (перемещения) указанной выше прозрачной ленты вокруг корпуса вычислительного устройства по координате Y, размещенный между соответствующими поперечными гранями корпуса устройства и поперечными гранями бегунка.
Отличительными признаками заявляемого устройства от прототипа являются:
нанесение на центральный движок изображения траектории отраженного УЗ луча и траектории прямого УЗ луча;
наличие второго движка с масштабной шкалой расстояний по координате X;
наличие бегунка новой конструкции, содержащего:
1. Две ортогональные масштабные шкалы на рамке бегунка.
2. Расположенную в корпусе бегунка и перемещаемую между боковыми сторонами окна бегунка вокруг вычислительного устройства в поперечном направлении прозрачную ленту с изображениями на ней типовых форм разделки кромок свариваемых деталей.
3. Блок протяжки упомянутой выше ленты вокруг корпуса вычислительного устройства по координате Y, жестко закрепленный в бегунке и размещенный между соответствующими поперечными гранями корпуса устройства и поперечными гранями бегунка.
Известно вычислительное устройство, содержащее прямоугольный корпус с двумя парами пазов, в которых расположены два движка, и имеющее бегунок.
Однако наличие на движках и бегунке иных шкал, а также новая конструкция бегунка позволяют в заявляемой совокупности признаков получить новый эффект, что дает возможность предположить, что заявляемое техническое решение может соответствовать критерию изобретения "существенные отличия".
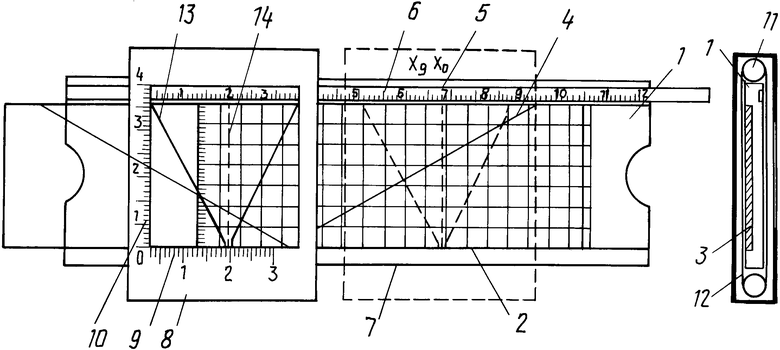
На чертеже изображен общий вид вычислительного устройства.
Устройство содержит выполненный из прозрачного материала, (например, оргстекла) корпус 1 прямоугольной формы с нанесенной на него ортогональной масштабной сеткой (аналогичной изображению миллиметровой бумаги) по координатам X и Y. В центральных пазах 2 корпуса 1 расположен с возможностью продольного перемещения центральный движок 3 с нанесенной на него траекторией 4 распространения в изделие прямого и однократно отраженного УЗ луча (его центральной оси). В дополнительных пазах 5 корпуса 1 установлен с возможностью перемещения в направлении перемещения центрального движка 3 дополнительный движок 6 с нанесенной на него масштабной шкалой расстояний (по координате X). Корпус 1 вычислительного устройства своими направляющими 7 вставляется в корпус 8 бегунка, способного перемещаться в направлении перемещения центрального движка 3 и снабженного прямоугольным прозрачным окном. На две взаимно перпендикулярные стороны рамки окна нанесены масштабные шкалы 9 и 10 (по осям X и Y). В корпус 8 бегунка введен блок 11 протяжки замкнутой гибкой прозрачной ленты 12. Блок 11 размещен между поперечными гранями корпуса 1 и поперечными гранями корпуса 8 бегунка. Лента 12 намотана с возможностью перемещения вокруг корпуса 1 между боковыми сторонами рамки окна бегунка в поперечном направлении (по координате Y). На ленту 12 нанесены изображения 13 стандартных (типовых) форм разделки кромок свариваемых деталей и визирной осевой линии 14.
Вычислительное устройство работает следующим образом.
А. При определении параметров контроля в процессе подготовки к контролю
Сначала в окне корпуса 8 бегунка с помощью устройства протяжки 11 устанавливают изображение 13 контролируемого сварного соединения таким образом, чтобы нижняя кромка рамки (окна) соответствовала внутренней поверхности контролируемого сварного соединения (показан шов с V-образной разделкой). Затем для оценки контролируемой зоны сечения сварного шва выбранным УЗ преобразователем и для определения величины зачистки околошовной зоны устанавливают по направляющим 7 бегунок 8 влево от начала масштабной сетки на корпусе 1 на расстояние, равное стреле УЗ преобразователя (расстояние от точки ввода до передней грани УЗ преобразователя). При этом бегунок 8 устанавливают так, чтобы начало масштабной сетки на корпусе 1 совпадало по шкале 9 бегунка 8 со значением стрелы УЗ преобразователя (равно 12 мм). Затем движок 3 по пазам 2 устанавливают так, чтобы траектория 4 распространения УЗ луча в изделии пересекала вертикальную масштабную шкалу 10 бегунка 8 в точке, соответствующей толщине контролируемого сварного соединения (толщина шва равна 20 мм). Это положение движка 3 фиксируется. Затем движок 6 по пазам 5 устанавливают так, чтобы начало его масштабной шкалы расстояний по X совпало с положением вертикальной шкалы 10 бегунка 8. При этом начало шкалы движка 6 соответствует положению точки ввода выбранного УЗ преобразователя на поверхности объекта контроля. После этого бегунок 8 перемещают в положение, когда левая часть контура 13 разделки кромок сварного соединения на толщине, равной толщине контролируемого сварного соединения, пересечет на корпусе 1 вертикальную шкалу масштабной сетки. Это соответствует положению, когда УЗ преобразователь своей передней гранью упирается в кромку валика усилителя сварного шва и, в результате, на вычислительном устройстве графически наглядно видно, какая часть сварного шва контролируется прямым лучом УЗ преобразователя.
Затем бегунок 8 перемещают в положение, когда левая часть контура 13 разделки кромок сварного соединения на толщине, равной толщине сварного соединения, пересечет траекторию 4 распространения УЗ луча на однократно отраженном участке. Это соответствует максимальному удалению УЗ преобразователя от шва при контроле однократно отраженным лучом. При этом положении по шкале движка 6 считывают расстояние по X от точки ввода до точки пересечения траекторий 4 и 13. В результате (с учетом размеров УЗ преобразователя) определяют величину необходимой зачистки околошовной поверхности с одной стороны шва.
Б. В процессе УЗ контроля сварного шва.
При обнаружении дефекта для определения его местоположения относительно сечения шва определяют масштабной линейкой или с помощью масштабной шкалы движка 6 вычислительного устройства расстояние Xо от УЗ преобразователя до оси (или кромки) валика шва (для отечественных методик контроля расстояние определяется от точки ввода УЗ преобразователя). Затем с дефектоскопа считывают координату Xд - проекцию расстояния от УЗ преобразователя (от точки ввода) до дефекта по поверхности изделия. После этого визирную линию 14 бегунка 8 устанавливают по шкале движка 6 на значение Xо (показана пунктиром), равное измеренному линейкой расстоянию от УЗ преобразователя до оси (или кромки) валика шва. После этого, используя ту же шкалу движка 6, на значении, равном считанному с дефектоскопа значению Xд, опускают ординату до пересечения с траекторией 4 УЗ луча.
Точка пересечения ординаты с траекторией 4 является местоположением дефекта. В результате наглядно видно, где по отношению к контуру сечения сварного шва расположен дефект.
Следует отметить следующее. В большинстве зарубежных УЗ дефектоскопов при определении координат дефектов приняты сокращенные проектные расстояния Xпд (т. е. расстояния не от точки ввода УЗ преобразователя, а от его передней грани до проекции дефекта на поверхность X). Соответственно начало масштабной шкалы движка 6 должно устанавливаться с началом масштабной сетки на корпусе вычислительного устройства.
Кроме того, с целью использования нескольких УЗ преобразователей с различными углами ввода УЗ на центральном движке 3 может вычерчиваться семейство траекторий 4 или движок 3 может быть сменным для разных УЗ преобразователей.
На гибкой прозрачной ленте 12 наносятся различные контуры разделки кромок свариваемых деталей, в частности с V, X, K и др. видами разделок.
Конструкция устройства блока протяжки ленты 12 может быть разнообразной. Например, помимо фрикционной конструкции протяжка может осуществляться с помощью зубчатого зацепления, если лента перфорированная, или каким-либо другим способом.
Результаты испытаний опытного образца вычислительного устройства в лабораторных и производственных условиях показали его высокую эффективность и удобство при определении местоположения дефекта относительно сечения сварного шва в процессе контроля и при определении исходных параметров контроля. (56) Гурвич А. К. , Ермолов И. Н. Ультразвуковой контроль сварных швов. М. : Наука, 1972, с. 119.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 1996 |
|
RU2131123C1 |
| Линейка для суммирования | 1990 |
|
SU1791821A1 |
| Счетная линейка | 1977 |
|
SU763907A1 |
| Вычислительное устройство "Могол | 1988 |
|
SU1566373A1 |
| Счетная линейка | 1984 |
|
SU1231516A1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| ЛОГАРИФМИЧЕСКАЯ СЧЕТНАЯ ЛИНЕЙКА | 1956 |
|
SU114473A1 |
| Универсальный шаблон специалиста неразрушающего контроля | 2019 |
|
RU2714458C1 |
| Вычислительное устройство | 1982 |
|
SU1103243A1 |
| УНИВЕРСАЛЬНЫЙ ШАБЛОН ВОРОТНИКА | 2004 |
|
RU2264144C1 |
Изобретение относится к аналого-графической вычислительной технике и может быть использовано в качестве спецвычислителя в ультразвуковой дефектоскопии. Цель изобретения - расширение класса решаемых задач и повышение быстродействия. Устройство содержит корпус с нанесенной на него ортогональной масштабной сеткой, в центральном и дополнительном пазах которого размещены центральный и дополнительный движки, бегунок, замкнутый по периметру поперечного сечения корпуса, блок протяжки гибкой ленты. На центральном движке нанесена траектория прямого и отраженного ультразвукового луча, на дополнительном движке - масштабная шкала расстояний. Бегунок имеет прямоугольное прозрачное окно с нанесенными на его ортогональные рамки масштабными шкалами. На блок протяжки гибкой ленты намотана перемещаемая вокруг корпуса замкнутая прозрачная гибкая лента с изображением на ней визирной линии и стандартных форм разделки кромок свариваемых изделий. 1 ил.
ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ, содержащее корпус, выполненный из прозрачного материала, с нанесенной на него ортогональной масштабной сеткой, центральный движок, снабженный шкалой и размещенный в центральном пазу корпуса под ортогональной масштабной сеткой с возможностью продольного перемещения, дополнительный движок, снабженный шкалой и размещенный в дополнительном пазу корпуса с возможностью перемещения в направлении перемещения центрального движка, бегунок с нанесенной на него шкалой, размещенный на корпусе с возможностью перемещения в направлении перемещения центрального движка и снабженный прямоугольным прозрачным окном, отличающееся тем, что, с целью расширения класса решаемых задач и повышения быстродействия, бегунок выполнен замкнутым по периметру поперечного сечения корпуса, дополнительно введен блок протяжки гибкой ленты, размещенный между соответствующими поперечными гранями корпуса и поперечными гранями бегунка и на который намотана с возможностью перемещения вокруг корпуса между боковыми сторонами рамки окна бегунка в поперечном направлении замкнутая прозрачная гибкая лента, на которую нанесены визирная линия и изображения стандартных форм разделки кромок свариваемых изделий, на двух ортогональных сторонах рамки окна бегунка шкалы выполнены масштабными с общей точкой отсчета, причем на центральном движке шкала выполнена в виде изображения траектории прямого и отраженного ультразвукового луча, а на дополнительном движке шкала выполнена масштабной.
