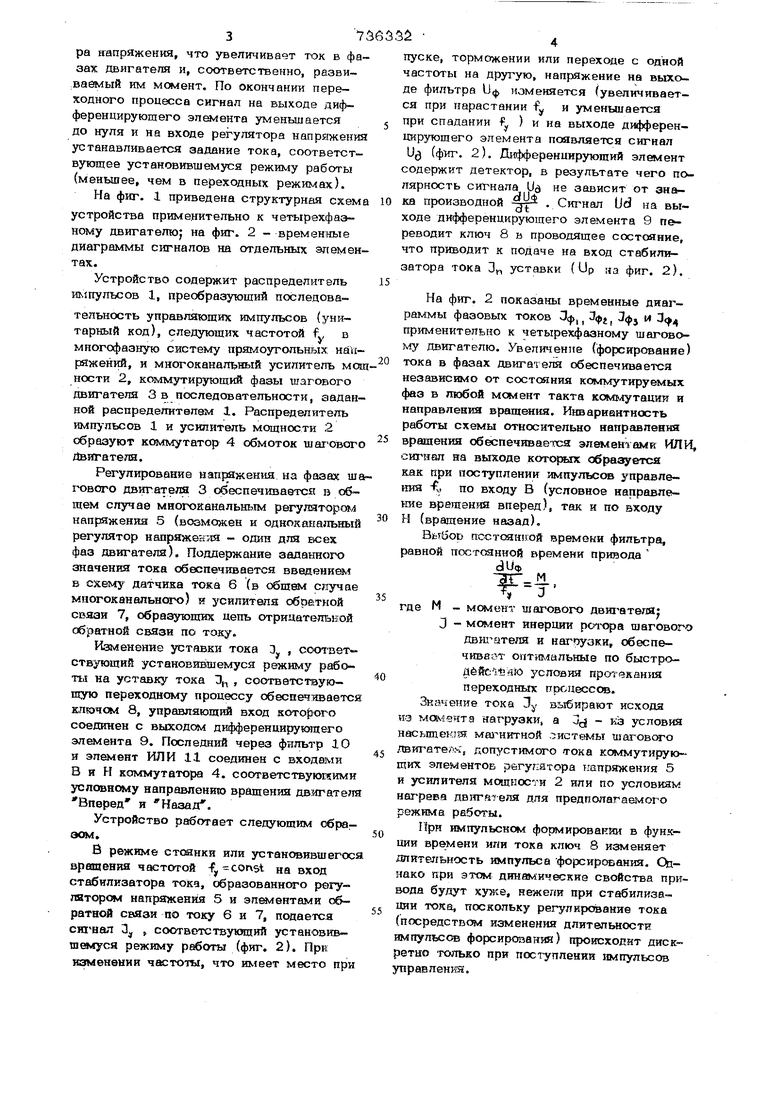
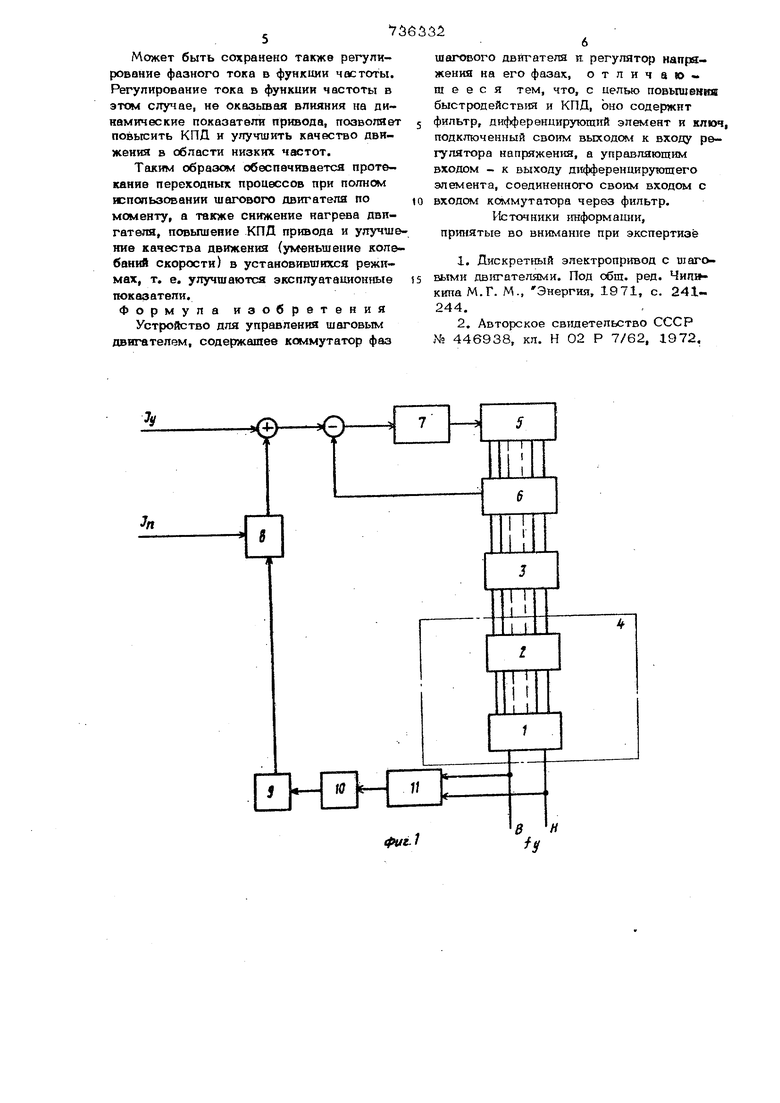
pa лапряжения, что увеличивает ток в фазах двигателя и, соответственно, развиваемый им момент. По окончании переходного процесса сигнал на выходе дифференцирующего элйУ1ента уменыиается до нуля и на входе регулятора напряжения устанавливается задание тока, соответствующее установившемуся режиму работы (меньшее, чем в переходных режш.лах). На фиг. 1 приведена структурная схем устройства применительно к четырехфаэному двигателю на фиг. 2 - времен;ные диаграммы сигналов на отдельных тах. Устройство содержит распределитель импульсов 1, преобразующий последовательность управляющих импульсов (унитарный код), следующих частотой fy в многофазную систему прямозггольных напряжений, и многоканальный усилитель мета ности 2, коммутирующий фазы тоагового двигателя Зв последовательности, заданной распределителем 1. Распределитель имп -льсов 1 и усилитель мощности 2 образуют коммутатор 4 обмоток шагОвог Двигателя. Регулирование напряжения на фазах ш гового двигателя 3 обеспечивается в общем случав миогоканальным регуяаторшл напряжения 5 (возможен и одноканапьный регулятор напряжения - один для всех фаз двигателя). Поддержание зада1:пй ого значения тока обеспечивается введении в схему датчика тока 6 (в обшем случае многоканального) и усилителя обратной связи 7, образующих цепь отрицат(гл1ьной обратной связи по току, Изменение уставки тока Э , со1ответ ствующий установившемуся режиму работы на уставку тока Dj, , соотввтст1зующую переходному процессу обеспеч:}таетс ключом 8, управляющий вход которого соединен с выходом дифференцирую)цего элемента 9. Последний через фильтр 1О и элемент ИЛИ И соединен с входами В и Н коммутатора 4. соответствуюг5имн условному направлению вращения дв1игател Вперед и Назад. Устройство работает следующим образом. В режиме стоянки или устансдаявшегос вращения частотой const на вход стабилизатора тока, образованного peiryлатором напряжения 5 и эпй ентами обратной связи пО току 6 и 7, подается 3 , соотвотствутсяиий установившемуся режиму работы (фиг, 2). При изменении частоты, что имеет место при уске, торможении или переходе с одной астоты на другую, напряжение на выхое фильтра Уф поменяется (увеличиваетя при нарастании f и уменьшается ри спадании f ) и на выходе дм})ференирующего элемента появляется сигнал и (фкг. 2). /1ифференцнрующий элемент одержит детектор, в результате чего поярность сигнала 11,3 не зависит от знаа производной .Сигнал Ud на выоде дифференцирующего элемента 9 пееводит ключ 8 в проводящее состояние, что приводит к подаче на вход стабилиатора тока 3ц уставки (Up на фиг. 2). На фиг. 2 показаны временные диаграммы фазовых токов 3( и 3 применительно к четырехфазному шаговому двигателю. Увепичение (форсирование) тока в фазах двигателя обеспечивается независимо от состояния коммутируемых фаз в любой момент такта ксжолутацин и направления вращения. Инвариантность работы схемы относительно направления вршдения обеспечивается элемешамк ИЛИ, сигнал на выходе кото|Ж1х образуется как при поступлении импулызсяэ управлекия -f,, по входу В (условное направление вращения вперед), так и по входу Н (вращение назад). Вьтбор псстоян(:ой времени фильтра, равной постоянной времени привода dUq, ЖГV-Tгде М - момент шагового двшателя 3 - момент инерции ротора шагового двшр теля и нагоузки, обеспечиваат оптж альные по быстроДёйс:. условия протекания переходных прсдессс. Значение тока Зу выбирают исходя и-з MObSsHTa нагрузки, а - кэ условия насыщения мш нитной ,:;истемы шагового двигатеач, допустимого тока коммутирую- ших элементов регупятора напряжения 5 и усилителя мощности 2 или по условиям нагрева двигателя для предполагаемого режима работы. При импульсном формировакии в функции времени игш тока ключ 8 изменяет длительность импульса форсирования. Ойнако при этом динамические свойства привода будут , нежели при стабилизации тока, поскольку регулирование тока (посредством изменения длительности импульсов форсирования) происходит дискретно только при посгупленнн импульсов управ ленш)1. Может быть сохранено также регулирование фазного тока в функции частоты. Регулирование тока в функции частоты в этом случае, не оказьтая влияния на динамические показатели привода, позволяе повысить КПД и улучшить качество движения в области низких чжзтот. Таким образом обеспечивается протекание переходных процессов при полном (спользовании шагового двигателя по моменту, а также снижение нагрева двигателя, повышение КПД привода и улучше ние качества движения (ук«еньшение коле баний скорости) в установившихся режимах, т. е. улучшаются эксплуатационные показатели. Формула изобретения Устройство для управления шаговым двигателем, содержащее коммутатор фаз шагового двигателя и. регулятор напряжения на его фазах, отличаю Щ е е с я тем, что, с целью повьтоекия быстродействгя и КПД, Ьно содержит фильтр, дифференцирующий элемент и ключ подключенный своим выходе к входу регулятора напряжения, а управляющим входом -. к выходу дифференцирующего элемента, соединенного своим входом с входом коммутатора через фильтр. Источники ргаформаиии, принятые во BHHNiaHiie при экспертизе 1.Дискретный электропривод с шаг«. выми двигателями. Под общ. ред. Чип кипа М.Г. М., Энергия, 1971, с 241244. 2,Авторское св шетельство СССР 446938, кл. Н 02 Р 7/62, 1972,
Л Л /Ч А Л
я
t
-1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления @ -фазным шаговым двигателем | 1984 |
|
SU1246331A1 |
| Устройство для управления многофазным шаговым двигателем | 1981 |
|
SU983965A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1098099A1 |
| Устройство для управления шаговым двигателем с импульсным форсированием | 1975 |
|
SU750692A1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1102005A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU728205A1 |
| Способ управления шаговым приводом | 1979 |
|
SU989734A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1599967A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU902191A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU936341A1 |

f/
«р/
Н
Уф}
