(54) СПОСОБ УПРАВЛЕНИЯ ШАГСВЫМ ПРИВОДОМ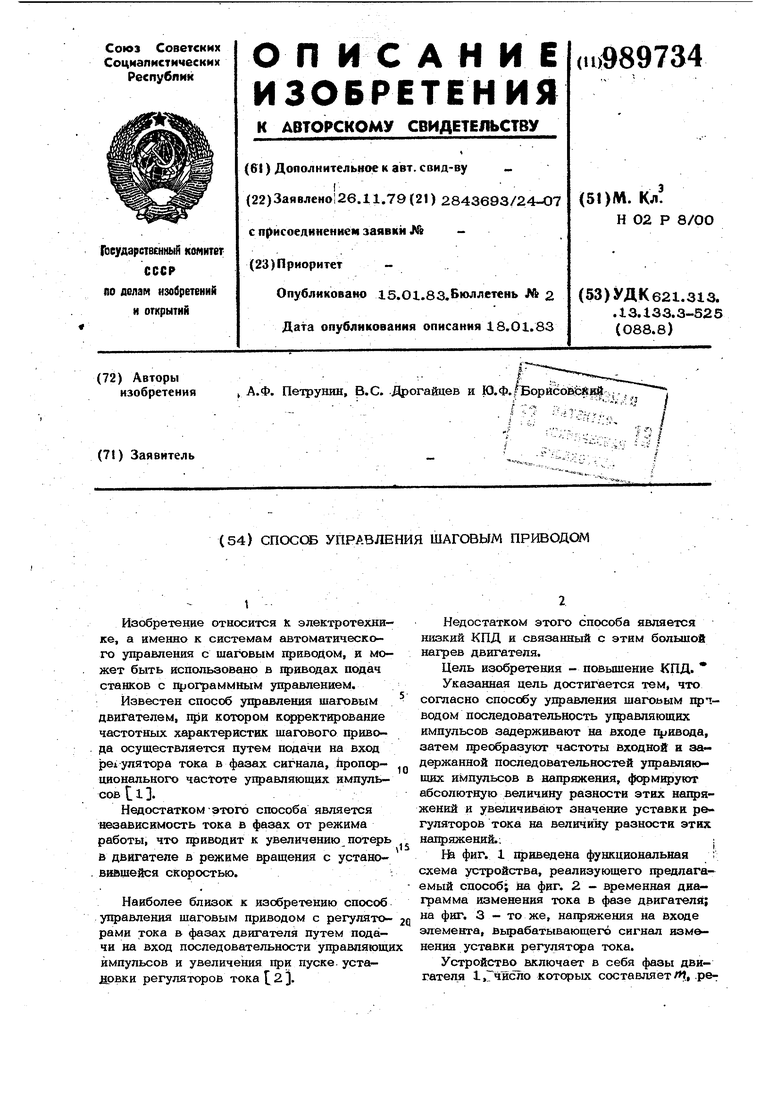

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1977 |
|
SU1023614A1 |
| Устройство для управления шаговым двигателем | 1976 |
|
SU736332A1 |
| Способ управления шаговым приводом | 1988 |
|
SU1571744A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронного электродвигателя | 1983 |
|
SU1112516A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1561186A1 |
| Устройство для управления током луча электронно-лучевой термической установки | 1980 |
|
SU877801A1 |
| Устройство стартстопного управления четырехфазным шаговым двигателем | 1987 |
|
SU1494196A1 |
| БЕСКОНТАКТНЫЙ ПРОПОРЦИОНАЛЬНЫЙ ШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1966 |
|
SU187127A1 |
| Устройство для управления многофазным шаговым двигателем | 1981 |
|
SU983965A1 |
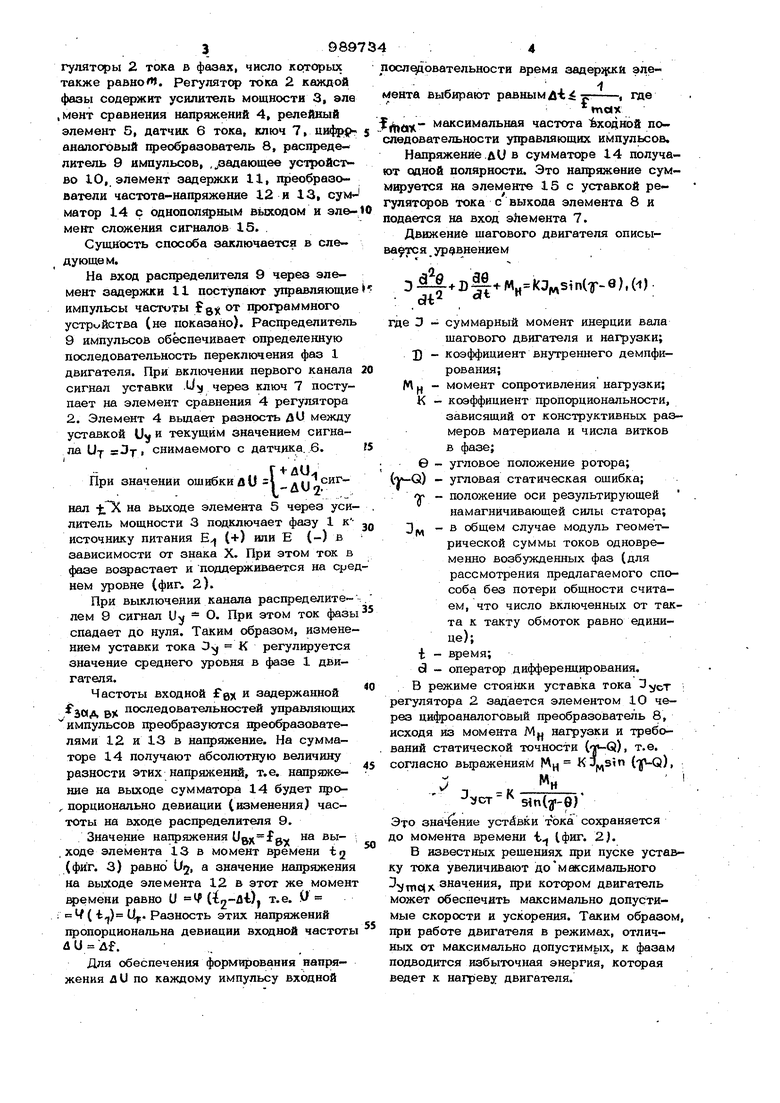
Изобретение относится к электротехнике, а именно к системам автоматического управления с шаговым приводом, и может быть использовано в фиводах подач станков с программным управлением. Известен способ управления шаговым двигателем, 1фй котором корректирование частотных характеристик шагового привода осуществляется путем подачи на вход jpeJ yлятopa тока в фазах сигнала, йропорционального частоте утфавляющнх импульсов tl. Недостатком этого способа является независимость тока в фазах от режима работы, что приводит к увеличению потерь в двигателе в режиме вращения с уртановш щейся скоростью. Наиболее близок к изобретению способ управления шаговым приводом с регуляторами тока в фазах двигателя путем подачи на вход последовательности управляющи импульсов и увеличения при пуске, устаЖ вки регуляторов тока 12 . Недостатком этого способа является низкий КПД и связанный с этим большой нагрев двигателя. Цель изобретения - повышение КПД. Указанная цель достигается тем, что согласно способу управления шагоьым 1ф водом последовательность у1)авляющих импульсов задерживают на входе 1ц ивода, затем 1чзеобразуют частоты входной н задержанной последовательностей управляющих импульсов в напряжения, фррм{фуют абсолютную величину разности этих на1фяжений и увеличивают значение уставки регуляторов тока на величину разности этих напряжений.;, № фиг. 1 приведена функциональная схема устройства, реализующего предлагаемый способ; на фиг. 2 - временная диаграмма изменения тока в фазе двигателя; на фиг. 3 - то же, напряжения на входе элемента, вырабатывающего сигнал изменения уставки регулятора тока. Устройство включает в себя фазы двигателя 1,Гчиспо которых составляет W, .ре гуляторы 2 тока в фазах, число которых также равно . Регулятср тока 2 каждой фазы содержит усилитель мощности 3, эле ,мент сравнения напряжений 4, релейный элемент 5, датчик 6 тока, ключ 7, цифр аналоговый преобразователь 8, распределитель 9 импульсов, , задающее устройст во 10, элемент задержки 11, преобразователи частота-напряжение 12 и 13, сумматор 14 G однополярным вьосодом и элемент сложения сигналов 15. . Сущность способа заключается в следующем. На вход распределителя 9 через элемент задержки 11 поступают управляющие импульсы частоты Q от программного устройства (не показано). Распределитель 9 импульсов обеспечивает определенную последовательность переключения фаз 1 двигателя. При включении первого канала сигнал уставки U через ключ 7 поступает на элемент сравнения 4 регулятора 2. Элемент 4 вьщает разность ди между уставкой Uv и текущим значением сигнала Uj Лт, снимаемого с датчика. 6. Г + ди При значении ошибки дУ л( V .„ нал на выходе элемента 5 через усилитель мощности 3 подключает фазу I кисточнику питания Е (+) или Е (-) в зависимости от знака X. При этом ток в фазе возрастает и поддерживается на сред нем уровне (фиг. 2). При выключении канала распределителем 9 сигнал U - О. При этом ток фазы спадает до нуля. Таким образом, изменением уставки тока Оу К регулируется значение среднего уровня в фазе 1 двигателя. Частоты входной f вХ задержанной ЗИд ВХ последовательностей управляющих импульсов преобразуются преобразователями 12 и 13 в напряжение. На сумматоре 14 получают абсолютную величину разности этих напряжен, т.е. напряжение на выходе сумматора 14 будет лро порционально девиации (изменения) частоты на входе распределителя 9. Значение напряжения вх ходе элемента 13 в момент времени t2 (фиг. 3) равно Uj, а значение напряжения на выходе элемента 12 в этот же момент фемени равно U f (2-л4)| т.е. U ; Ц( t) Uf. Разность этих напряжений пропорциональна девиации входной частоты ли Д. Для обеспечения формирования напряжения ли по каждому импульсу входной оследовательности время задерз ски элеента выбирают равным/It jr, где максимальная частота входной поледовательности управляющих импульсов. Напряжение .ди в сумматоре 14 получат одной полярности. Это напряжение сумируется на элементе 15с уставкой реуляторов тока с выхода элемента 8 и одается на вход элемента 7. Движение щагового двигателя описыа тся ур/ внением (т-в).(1). где J - суммарный момент инерции вала щагового двигателя и нагрузки; В - коэффициент внутреннего демпфирования;М - момент сопротивления нагрузки; К - коэффициент пропорциональности, зависящий от конструктивных размеров материала и числа витков в фазе; е - угловое положение ротора; () - угловая статическая ошибка; -v - положение оси результирующей намагничивающей силы статора; 3 - в общем случае модуль геометрической суммы токов одновременно возбужденных фаз (для рассмотрения предлагаемого способа без потери общности считаем, что число включенных от такта к такту обмоток равно единице); i - время; 61 - оператор дифференцирования. В режиме стоянки уставка тока уот ; регулятора 2 задается элементом 10 через цифроаналоговый преобразователь 8, исходя из момента Ми нагрузки и требований статической точности (ip-Q), т.е. согласно выражениям Mj (), sin(y-Q} Это аиачеккч устйвки тЪка созфаняется до момента времени t (фиг. 2). В известных рещениях при пуске уставку тока увеличивают до м аксимального 1 значения, при котором двигатель может обеспечить максимально допустимые скорости и ускорения. Таким образом, при работе двигателя в режимах, отличных от максимально допустимых, к фазам подводится избыточная энергия, которая ведет к нахреву двигателя. В предлагаемом способе в режимах раз гона и торможения уставку 3 „о| увш И 1овают иа величвву, пропорциональную абсоЛЮТ1ЮЙ величине девиации частоты ляющих импульсов, т.е. пропорционально 1фограмм|фуемому ускорению двига теля. K-sin(y-er тслх ст у.(-е} R-Г уравнении (2) огфедеВеличинаUT ляет составляющую тока уставки, зависящую от момента инерции ротфа, нагрузки и Щ}ограммируемого ускорения. Таким образом, при реализации предлагаемого способа энергия, подводимая к фазе двигателя, меньше, чем при известных способах управления, а следовательно, КПД исполь(2) зования двигателя вьиае. При этом также снижается нагрев двигателя. Форм а изобретения , Способ управления шаговым гфиводом с регуляторами тока в фазах двигателя путем подачи на вход последовательности у1фавляюпшх импульсов и увеличения при пуске уставки регуляторов тока, о т л нч a.tc щ и и с я тем, что, с целью повьк шения КПД хфивода, последовательность управляющих импульсов зад живают на входе привода, затем хфеобразуют часто-. ты входное и задержанной последовательностей управляющих импульсов в напряжения, формируют абсолютную величину разности этих напряжений и увеличивают значение уставки регуляторов тока на величину разности этих нахфяжений. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 551788, кл. Н О2 Р 7/62. 1975. 2.Авторское свидетельство СССР по заявке № 246962 5/24-О7, кл. Н 02 Р 8/ОО, 1976,(щ)ототип).
Sy-HUyliJ
- -
0
и
ii ii
3r
Фиг.1
Фиг.З
