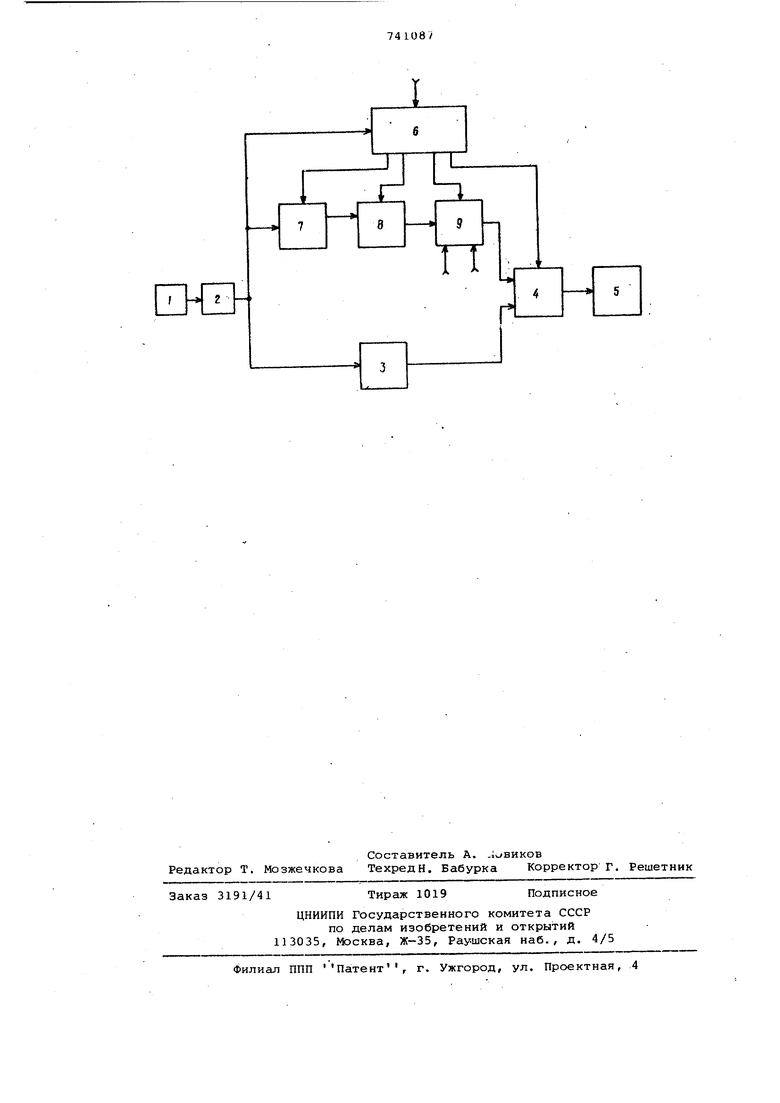
Изобретение относится к приборостроению и предназначено для контроля зубьев маховика. Известно устройство контроля зубье маховика, содержащее последовательно включенные датчик частоты вращения, формирователь импульсов, измеритель разности временных интервалов, блок сравнения и сигнализатор, синхронизатор, вход которого подключен к выходу формирователя импульсов, а выход - ко второму входу блока сравнения 1 . Недостатком известного устройства является низкая точность контроля зубьев маховика, поскольку при этом кон тролируется общая неравномерность появления импульсов, вызванная неравномерностью расположения зубьев на махо вике, и неравномерностью вращения вала двигателя. Целью изобретения является повышение точности контроля зубьев. Поставленная цель достигается тем что устройствр снабжено последователь но соединенными измерителем предельны значений временных интервалов, вход которого подключен к выходу формирователя импульсов, блоком вычитания и блоком масштабирования, выход которого соединен с дополнительным входом блока сравнения, а управляющие входы измерителя предельных значений временных интервалов, блока вычитания и блока масштабирования - к дополнительным выходам синхронизатора. На чертеже приведена блок-схема устустройства. Устройство содержит последовательно включенные датчик 1 частоты вргицения, формирователь 2 импульсов, измеритель 3 разности временных Интервалов, блок 4 сравнения и сигнализатор 5. Синхронизатор 6 своим входом подсоединен к. выходу формирователя 2 импульсов, а выходом - ко второму входу блока 4 сравнения. К выходу формирователя 2 импульсов подключены последовательно соединенные измеритель 7 предельных значений временных интервалов, блок 8 вычитания и блок 9 масштабирования, выход которого соединен с дополнительным входом блока 4 сравнения, а управляющие входы измерителя 7 предельных значений временных интервалов, блока 8 вычитания и блока 9 масштабирования - к дополнительным выходам синхронизатора. Устройство работает следующим образом.
Перед началом процесса контроля п одному из входов блока 9 масштабирования вводится для данного типа двигателя коэффициент К, а по второму значениедопустимой неравномерности следования импульсов от неравномерности расположения зубьев. По команде Запуск , подаваемой- на вход, синхронизатора б, он вырабатывает на своем первом выходе первый временной интервал, длительность которого равна или кратна одному обороту. В течение этого интервала измеритель 7 предельных, значений временных интервалов измеряет максимальное и минимальное значения периодов следования импульсов от датчика 1 частоты вращения.
Одновременно по концу первого вре.менногр интервала синхронизатор вырабатывает на своем втором выходе второй временной интервал, длительнст
ность которого определяется временем выполнения блоком 8 операции вычитания :
Т - Т макс. мин.
По концу второго временного интервала синхронизатор б вырабатывает на своем третьем выходе третий временной интервал. В течение этого интервала блок 9 масштабирования осуществляет операцию умножения величины (Т„а(; 5 коэффициент К и суммирование полученного значения к.
-TMUH ) AT, ), с вели
(Т,
чиной
макс
ЛТ. В конце третьего временного интервала блок 9 масштабирования вырабатывает на своем выходе пороговое значение (ЛТ-, )fpo,x + Л Tj , которое поступает на первый вход блока 4 сравнения.
По концу третьего временного интервала 9 синхронизатор б вырабатывает на своем четвертом выходе четвертый временной интервал, длительность которого равна или кратна циклу работы двигателя. В течение этого интервала блок 4 сравнения осуществляет сравнение текущих значений разности соседних периодов следования импульсов ЛТ) Tj - Т; , измеряемых измерителем 3 разности временных интервалов, с пороговым значением ЛТ
Если в течение четвертого временс ного интервала блок 4 сравнения не срабатывает ни разу, т. е. , то сигнализатор 5 фиксирует-, что неравномерность расположения зубьев не превышает заданной.величины ЛТ над Q уровнем (ДТ, ).
Если в течение, этого интервала блок 4 сравнения срабатывает хотя бы один раз, то сигнализатор 5 фиксирует тот факт, что неравномерность расположения зубьев превышает задан5 ную величину ДТ..
Таким образом, устройство позволяет повысить точность контроля зубьев маховика двигателя и тем самым повысить точность определения 1 ющности 0 последнего.
Формула изобретения
Устройство контроля зубьев, содер5 жащее последовательно включенные датчик частоты вращения, формирователь импульсов, измеритель разности временных интервалов, блок сравнения и сигнализатор, синхронизатор, вход ко торого подключен к выходу формирователя импульсов, а выход - ко в.торому входу блока сравнения, отличающееся тем, что, с целью повышения точности, оно снабжено последовательно соединенными измерителем предел&.ных значений временных интервалов, вход которого подключен к выходу формирователя импульсов, блоком вычитания и блоком масштабирования, выход которого соединен с допол0 нительным входом блока сравнения, а управляющие входы измерителя предель ных значений временных интервалов, блока вычитания и блока масштабирования - к дополнительньм выходам синхрок НИзатора.
Источники информации, принятые во внимание при экспертизе
1. Патент,ФРГ W 2507057, кл. G 01 М 15/00, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазоизбирательное устройстводля дВигАТЕля ВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU807112A1 |
| Ультразвуковой эхо-импульсный толщиномер | 1987 |
|
SU1490475A1 |
| Устройство для измерения среднего индикаторного давления двигателя внутреннего сгорания | 1984 |
|
SU1283559A1 |
| Устройство для измерения угла опережения зажигания | 1977 |
|
SU746129A1 |
| Измеритель скорости изменения частоты | 1985 |
|
SU1288620A1 |
| Устройство для измерения абсолютного отклонения частоты | 1982 |
|
SU1205050A1 |
| Устройство для ультразвукового контроля усилия затяжки резьбовых соединений | 1985 |
|
SU1280536A1 |
| Устройство для ультразвукового контроля | 1985 |
|
SU1260848A1 |
| Устройство для тревожной сигнализации | 1981 |
|
SU997062A1 |
| Умножитель частоты | 1982 |
|
SU1115048A1 |