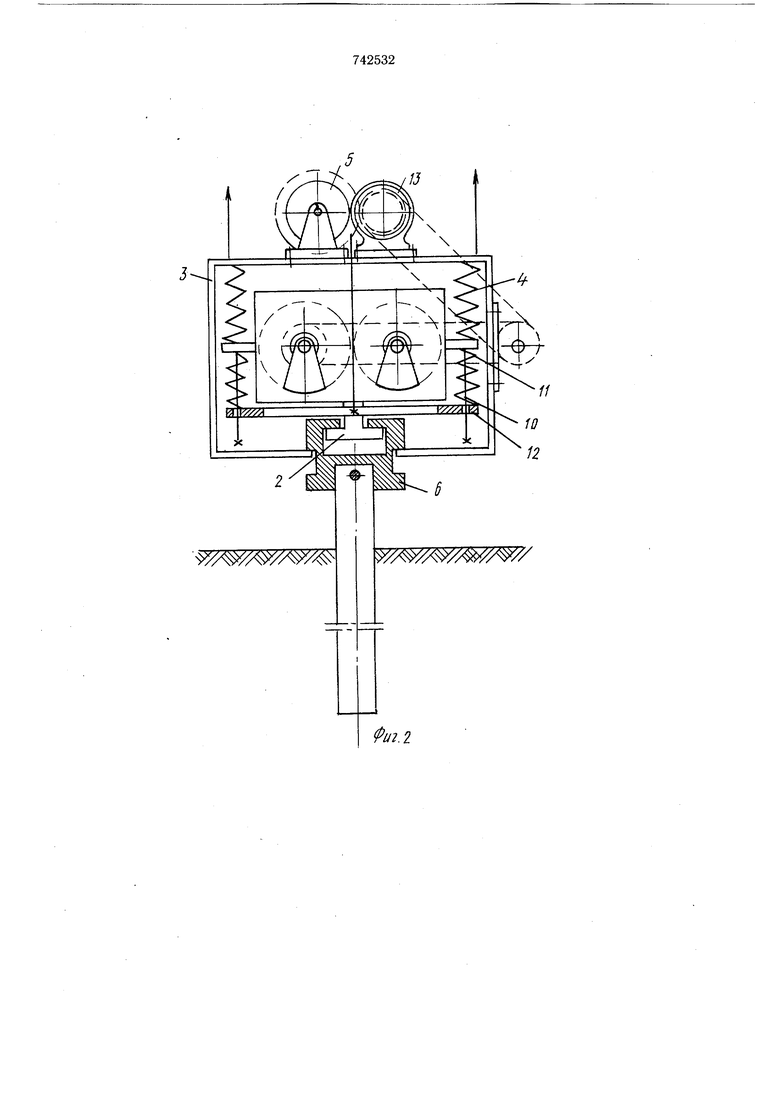
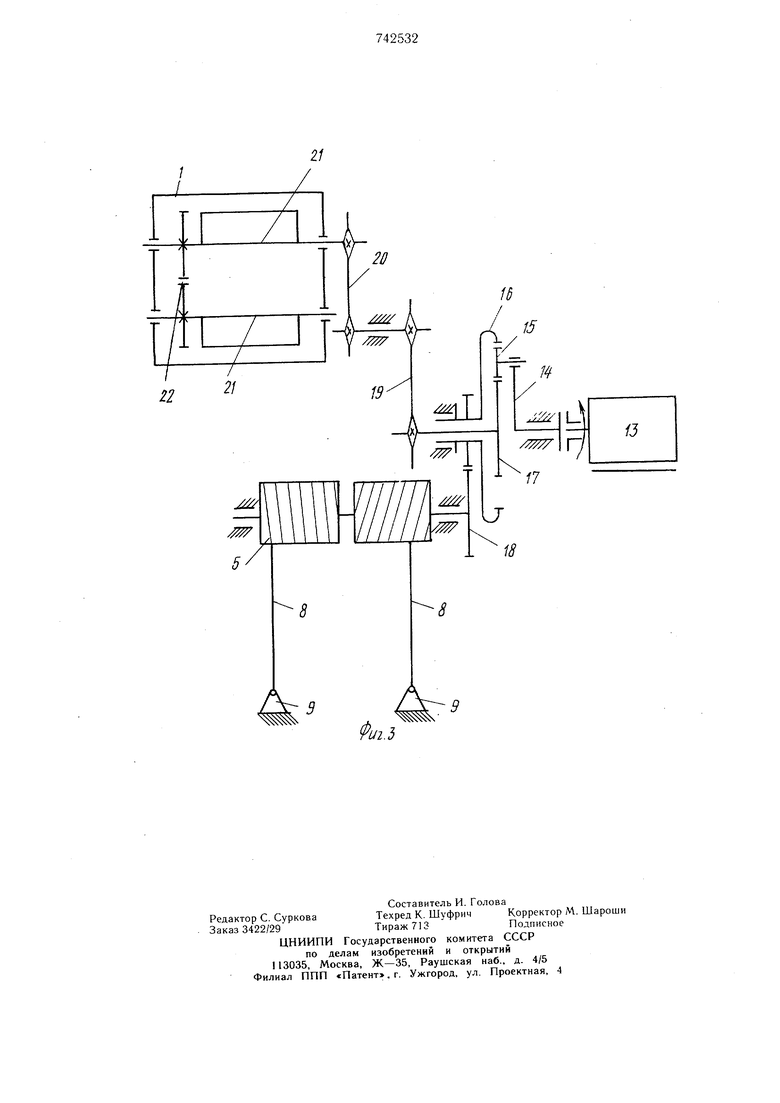
Изобретение относится к строительным работам, связанным с устройством фундаментов промышленных и гражданских зданий, шпунтовых ограждений и других сооружений. Для погружения различных элементов в грунт, а также для их извлечения широко применяются вибрационные устройства с использованием статического усилия вдавливания или извлечения, прилагаемого к элементу. Как правило, дополнительное статистическое усилие осуществляется за счет введения в копровую установку отдельно установленной лебедки с полиспастом. Известно устройство, включающее вибратор направленного действия с ударником, подвешенным на пружинах к раме, соединенной с механизмом пригрузки и наголовника 1. Недостатком этого устройства является то, что на режиме погружения и извлечения используются одни и те же пружины. Однако известно, что для эффективной работы устройства необходимо использовать при извлечении пружины большей жесткости, чем при погружении. Наиболее близким к изобретению техническим решением является устройство для погружения и извлечения свай, включающее раму, связанную посредством упругих элементов с вибратором направленного действия, -фивод, лебедку механизма пригруза 2. Недостатком данного устройства является его низкая производительность. Цель изобретения - повышение производительности путем автоматического поддержания равенства скоростей погружения и пригруза. Это достигается тем, что в устройстве для погружения и извлечения свай, включаюшем раму, связанную посредством упругих элементов с вибратором направленного действия, привод, лебедку механизма пригруза, лебедка механизма пригруза смонтирована на раме и кинематически связана с приводом и вибратором через дифференциальный механизм. На фиг. 1 показан момент погружения свай; на фиг. 2 - момент извлечения свай; на фиг. 3 приведена кинематическая схема предлагаемого устройства.
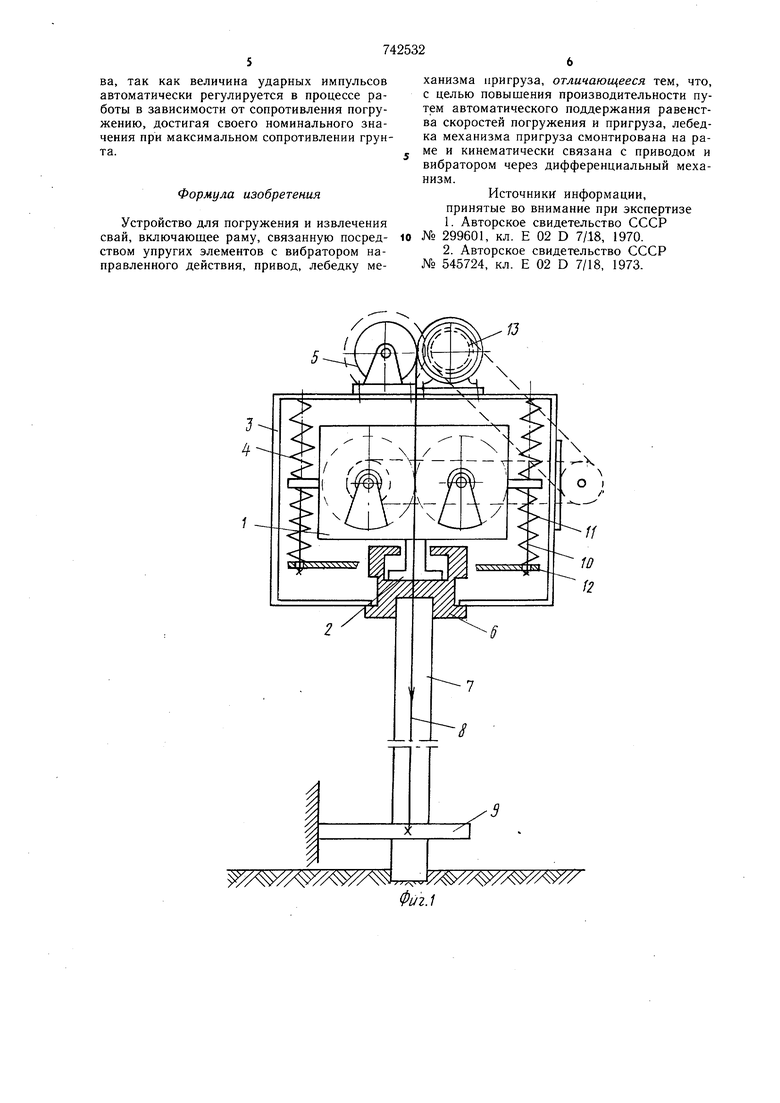
Устройство состоит из вибратора 1 направленного действия с ударником 2, рамы 3, связанной с вибратором посредством пружин 4, лебедки 5 механизма пригруза, установленной на раме, и наголовника 6, снабженного верхней и нижней наковальнями. Наголовник установлен на погружаемый элемент 7.
Канаты 8 лебедки 5 связаны с опорами 9, которые могут быть выполнены как на базовой машине (кран, копер и т.п.), так и в виде отдельного анкера. К корпусу вибратора прикреплены направляющие стержни 10 пружин 11, объединенные подвижной относительно стержней траверсой 12.
Привод вибратора и лебедки осуществляется от электродвигателя 13, установленного на раме 3. Вал электродвигателя связан с водилом 14, сателлиты 15 которого приводят во вращение большое 16 и малое 17 солнечные колеса дифференциального механизма. При этом больщое солнечное колесо 16 с помощью зубчатой передачи 18 связано с лебедкой 5, а малое 17 - посредством цепных передач 19 и 20 - с дебалансными валами 21 вибратора, синхронизированными между собой передачей 22.
Устройство работает следующим образом
При погружении (фиг. 1) элемент 7 заводится в наголовник 6, канаты 8 лебедки 5 закрепляются на опорах 9, после чего производится включение приводного двигателя 13. Вращение от двигателя (фиг. 3) передается посредством водила 14 и сателлитов 15 на лебедку 5 и дебелансные валы 21 вибратора 1. Крутящий момент от двигателя перераспределяется в зависимости от сопротивления вращения. Так как канаты лебедки ослаблены, а в вибраторе необходимо осуществить разгон дебалансов, то начинает вращаться лебедка 5. По мере натяжения канатов 8, сжатия пружин 4 и выборки всех зазоров в системе, сопротивление вращению лебедки возрастает и вся больщая часть крутящего момента передается на дебалансные валы, в результате чего происходит постепенный разгон вибратора на заданную частоту, которая достигает своего номинального значения при полной остановке лебедки, т.е. при реализации наперед заданного усилия пригрузки. При этом рама 3 (фиг. 1) передает нижней части наголовника все усилие пригрузки и обеспечивает его передачу на погружаемый элемент 7. Вибратор 1, поднимаясь под действием возмущающей силы, сжимает пружины 4, однако усилие, накапливаемое на пружинах, не передается на погружаемый элемент, так как оно воспринимается через канаты 8 опорами 9. При движении вниз вибратор бойком 2 наносит удар по наголовнику 6 и через него элементу 7. Элемент погружается в грунт, при этом натяжение канатов 8 ослабевает и крутящий момент начинает передаваться на лебедку, вновь восстанавливая усилие пригрузки. При больщой скорости погружения одновременно работают вибратор и лебедка, но частота вращения дебалансов уменьщается, а скорость вращения лебедки увеличивается, автоматически Перераспределяясь в дифференциальном механизме. При уменьщении скорости погружения частота ударов возрастает, увеличивая одновременно усилие натяжения лебедки до предельного заданного значения.
После окончания погружения производится остановка устройства, а затем запуск двигателя в обратную сторону. При этом канаты 8 ослабляются и все устройство грузоподъемным механизмом поднимается в исходное положение, т.е. подготавливается к погружению следующего элемента.
При проведении работ по извлечению ранее погруженных элементов, например, при разборке щпунтовой стенки, извлечении обсадных труб, устройство закрепляется на извлекаемом элементе. Закрепление может быть произведено любым известным способом, например, с помощью шкворня, как это показано на фиг. 2. Канаты 8 при извлечении закрепляются за траверсы 12. При приложении усилия от грузоподъемного крана к раме 3, последняя перемещается вверх и ударник 2 прижимается к верхней наковальне наголовника 6.
При включении двигателя 13 лебедка 5 натягивает канаты, перемещая вверх траверсу 12 по направляющим стержням 10, сжимая тем самым пружины И до заданной величины. По мере накопления усилия в пружинах происходит остановка лебедки и постепенный запуск вибратора. Вибратор, перемещаясь вниз, сжимает пружины И и ослабляет пружины 4, а перемещаясь верх, ударяет бойком 2 по верхней наковальне наголовника 6, обеспечивая тем самым значительное снижение статического усилия извлечения элемента. Пружины 4 и 11 в этом случае работают как параллельная система, жесткость которой определяется суммой жесткостей входящих в нее пружин. Увеличение жесткости пружин при извлечении повышает эффективность процесса виброударного извлечения элемента.
Рама 3, будучи подрессорной и имея подвижность относительно наголовника 6, обеспечивает снижение динамических нагрузок на приводной электродвигатель 13 и лебедку 5 как на режимах погружения (фиг. 1), так и на режимах извлечения (фиг. 2).
Таким образом, в предлагаемом устройстве автоматически поддерживается равенство скоростей погружения и приложения безинерционной пригрузки, в процессе погружения, а также увеличение жесткости пружин при извлечении.
Данное изобретение снижает пусковое значение мощности при запуске вибратора и увеличивает долговечность всего устройства, так как величина ударных импульсов автоматически регулируется в процессе работы в зависимости от сопротивления погружению, достигая своего номинального значения при максимальном сопротивлении грунта.
Формула изобретения
Устройство для погружения и извлечения свай, включающее раму, связанную посредством упругих элементов с вибратором направленного действия, привод, лебедку механизма нригруза, отличающееся тем, что, с целью повышения производительности путем автоматического поддержания равенства скоростей погружения и пригруза, лебедка механизма пригруза смонтирована на раме и кинематически связана с приводом и вибратором через дифференциальный механизм.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 299601, кл. Е 02 D 7/18, 1970.
2.Авторское свидетельство СССР № 545724, кл. Е 02 D 7/18, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОГРУЖЕНИЯ или ИЗВЛЕЧЕНИЯ СВАЙ | 1968 |
|
SU207807A1 |
| УСТРОЙСТВО для ПОГРУЖЕНИЯ и ИЗВЛЕЧЕНИЯ СВАЙ, ШПУНТА И ТОМУ ПОДОБНЫХ ЭЛЕМЕНТОВ | 1971 |
|
SU319675A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ И ИЗВЛЕЧЕНИЯ СВАЙ ИЛИ ШПУНТА | 2001 |
|
RU2188276C1 |
| УСТРОЙСТВО для ПОГРУЖЕНИЯ или ИЗВЛЕЧЕНИЯ СВАЙ. | 1969 |
|
SU237713A1 |
| Устройство для погружения свай и шпунта | 1959 |
|
SU132567A1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ПОГРУЖЕНИЯ СВАЙ, ШПУНТА И Т. П. ЭЛЕМЕНТОВ | 1966 |
|
SU215099A1 |
| УНИВЕРСАЛЬНОЕ ВДАВЛИВАЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2388868C1 |
| Устройство для погружения обсадных труб | 1980 |
|
SU897949A2 |
| Дизель-молот | 1982 |
|
SU1067144A1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528715C1 |
.,
0
Фи2.1
W
12
W,,
