Изобретение относится к приборостроению, в частности, к устройствам отклонения света и может быть использовано при создании сканирующих систем в лазерной связи. Известны двухкоординатные сканирующие устройства, состоящие лз зеркала Отражающего оптический луч, и пьезоэлектрических приводов, производящих отклонение з.еркала ClJ . В таком устройстве в качестве приводов поворо.та зеркал используются столбики, набранные из пьезозлектрических дисков и воздействующие на зеркала через сис тему рычагов. Недостатком этого устройства являются малые максимальные углы отклонения зеркала, не превышающие нескольких угловых минут (до 10). Наиболее близким к изобретению по технической сущности и достигаемому результату является двухкоординатное сканирующее устройство, содержащее зеркало, расположенное на трех опорах, два пьезоэлектрических привода, шарнирно соединенных с двумя опорами, генератор-возбудитель 2. Недостатками данного устройства являются малые углы отклонения зеркала и невысокое быстродействие Это объясняется малыми допустимыми углами отклонения, характерными для биморфных пьезоэлектрических приводов, и их недостаточной жесткостью на изгиб. Цель изобретения - увеличение максимального угла отклонения зеркала и повышение быстродействия сканирования. Это достигается тем, что устройство дополнительно содержит управляющее устройство, дешифратор, усилитель-интерполятор и датчик действительного положения зеркала, при этом каждый привод выполнен из двух, взаимно перпендикулярных в исходном положении и поджатых друг к другу, пьезокерамических стержней, закрепленных шарнирно относительно корпуса, а электроды стержней подсоединены к управляющему устройству, к одному входу которого через дешифратор и усилитель-интерполятор подключен датчик действительного положения зеркаша, а ,к другому - генератор высокочастотных колебаний. На фиг. 1 прив-эдено предлагаемое устройство, вид сверху; на фиг. 2 схематически изображен привод.
Зеркало 1 при помощи пружины 2 прижимается к неподвижной опоре 3 к к двум подвижным опорам 4. Каждая подвижная опора 4 расположена на горизонтальном пьезокерамическом стержне 5 , к которому пружиной 6 поджат вертикальный пьезокерамический стержень 7. В исходном положении пьезо(керамические стержни 5 и 7 находятсЬя во взаимно перпендикулярном пологКении, и поверхность контакта гори онтального стержня 5 выполнена как дуга окружности с радиусом i
где 6 - попная длина стержня.
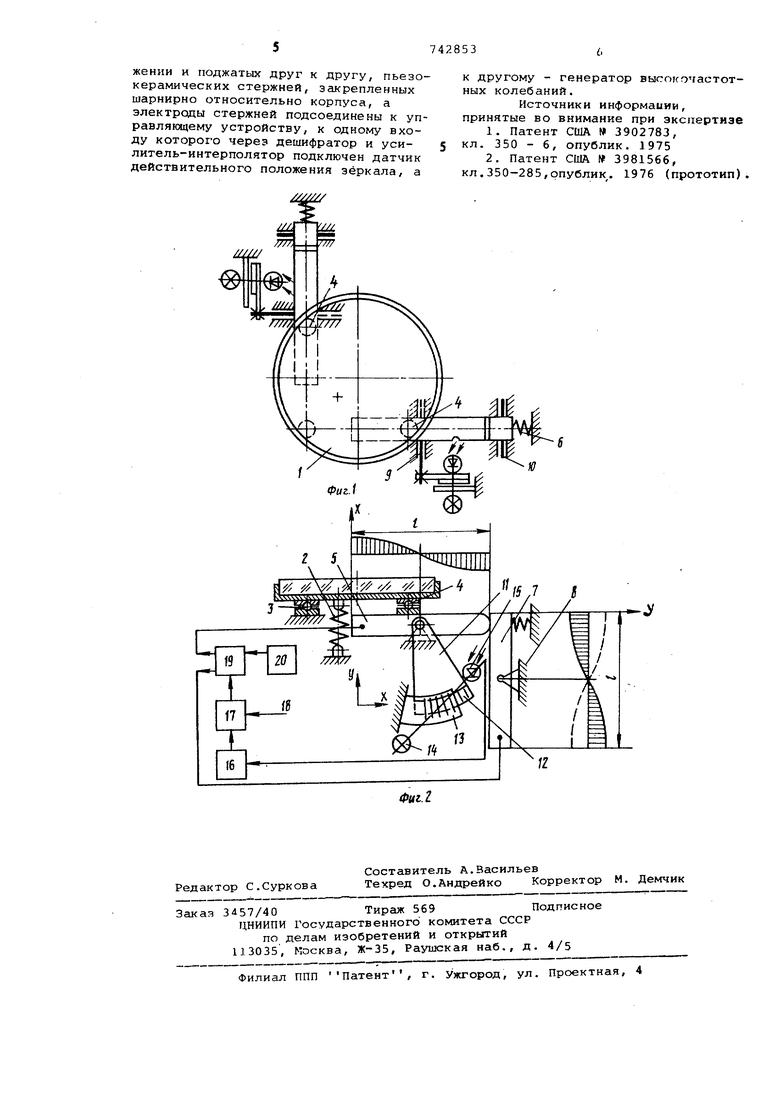
Йьезокерамические стержни 5 и / яв яются пьезоэлектрическими цреобрадователями колебаний и крепятся к копусу 8 шарнирно, причем шарниры 9 и 10 расположены в узлах колебаний (см.эпюры на фиг. 2). На оси шарнира 9 горизонтального стержня 5 крепится Лепесток 11 с сектором кругового растра 12, сопряженного с таким же сектором неподвижного растра 13. Источник света 14 просвечивает через .Образующуюся в растровом сопряжении муаровую картину, изменение интенсив(ocти которой фиксируется фоточувстбительным элементом 15, подсоединенным к входу интерполятора 16, служащего для повышения дискретности задаИия и отсчета угла сканирования. Выход .интерполятора 16 подсоединен к ВХОДУ дешифратора 17, к другому вход Которого подсоединяется управляющий сигнал 18. Выход дешифратора соединен с блоком 19 управления, который коммутирует подсоединение генератора 20 высокочастотных электрических колебаний к электрсдам стержней 5 и 7.
Сканирующееустройство работает следующим образом.
Выходные сигналы 18, задающие требуемое положение зеркала 1, поступаю в дешифратор 17, в другой вход которого через усилитель-интерполятор 16 от датчика поступает информация о текущем значении угла поворота зеркала 1.
В зависимости от рассогласования .текущей и заданной координаты дешифратор 17 вьвдает импульсы управления блоку 19 управления, который подключает соответствующим образом напряжение генератора 20 к электродам преобразователей 5 и 7, которые начинаю совершать высокочастотные резонансные колебания с частотой
i-fe где С - скорость звука в материале
преобразователя;
., - длина преобразователя (см.
фиг. 2), т.е. по длине преобразователя укладывается половина волны (см. эпюры на фиг. 2) и с узлом колебаний в середине преобразователя. В зоне контакта преобразователей 5 и 7 суммируются два
типа колебаний, тангенциальные, задаваемые преобразователем 7, и нормальные к поверхности контакта, задаваемые преобразователем 5.
Частоты колебаний обоих преобразователей одинаковы (заданы генератором 20.) Таким образом, в зоне контакта происходят косные соударения большой частоты, приводящие к появлению однонаправленных импульсов с частотой равной частоте питания преобразователей 5 и 7, преобразователь 5 совершает поворот по оси, находящейся в его середине (в узле колебаний) . Это движение с передаточным отношением i через опору 4 передается 5 зеркалу 1 . Q
-dC
где oL- угол наклона зеркала 1;
Q - угол поворота преобразователя 5;
0 i 10,9 для реализованного образца устройства. При реверсировании меняется фаза колебаний одного из преобразователей на 180° {пунктирная кривая на фиг. 2) и направление действия импульсов меняется на противоположное. Чувствительность такого привода очень высока (сотые доли микрометра), так как амплитуды колебаний очень малы (несколько микрометров), а частоты большие - от 20 кГц до 200 кГц.
Быстродействие сканирования зависит только от величины момента привода,так как частота первого резонане са зеркала 1 на упругой связи (в которую входит изгибная жесткость преобразователя 5) довольно высокая.
Эффективность предлагаемого двухкоординатного сканирующего устройства заключается в значительном увеличении максимального угла отклонения зеркала (до 5® в изготовленном макете) , и тем самым в повышении функциональных возможностей сканирующего устройства, а также повышении быстродействия, ввиду отсутствия в упругой цепи привода звеньев с пониженной жесткостью.
Формула изобретения
Двухкоординатное сканирующее устройство, содержащее зеркало, расположенное на трех опорах, два пьезоэлектрических привода, шарнирно соединенных с двумя опорами, генератор-возбудитель, отличающеес я тем, что, с целью увеличения максимального угла отклонения зеркала и повышения быстродействия сканироваНИН, оно дополнительно содержит управляющее устройство. Дешифратор, усилитель-интерполятор и датчик действительного положения зеркала, при этом каждый привод выполнен из двух, взаимно перпендикулярных в исходном положенни и поджатых друг к другу, пьезокерамических стержней, закрепленных шарнирно относительно корпуса, а электроды стержней подсоединены к управляющему устройству, к одному входу которого через дешифратор и усилитель-интерполятор подключен датчик действительного положения зеркала, а
к другому - генератор высокочастотных колебаний.
Источники информации, принятые во внимание при экспертизе
1.Патент США W 3902783, кл. 350 - 6, опублик. 1975
2,Патент США № 3981566,
кл. 350-28 5, опублик, 1976 (прототип).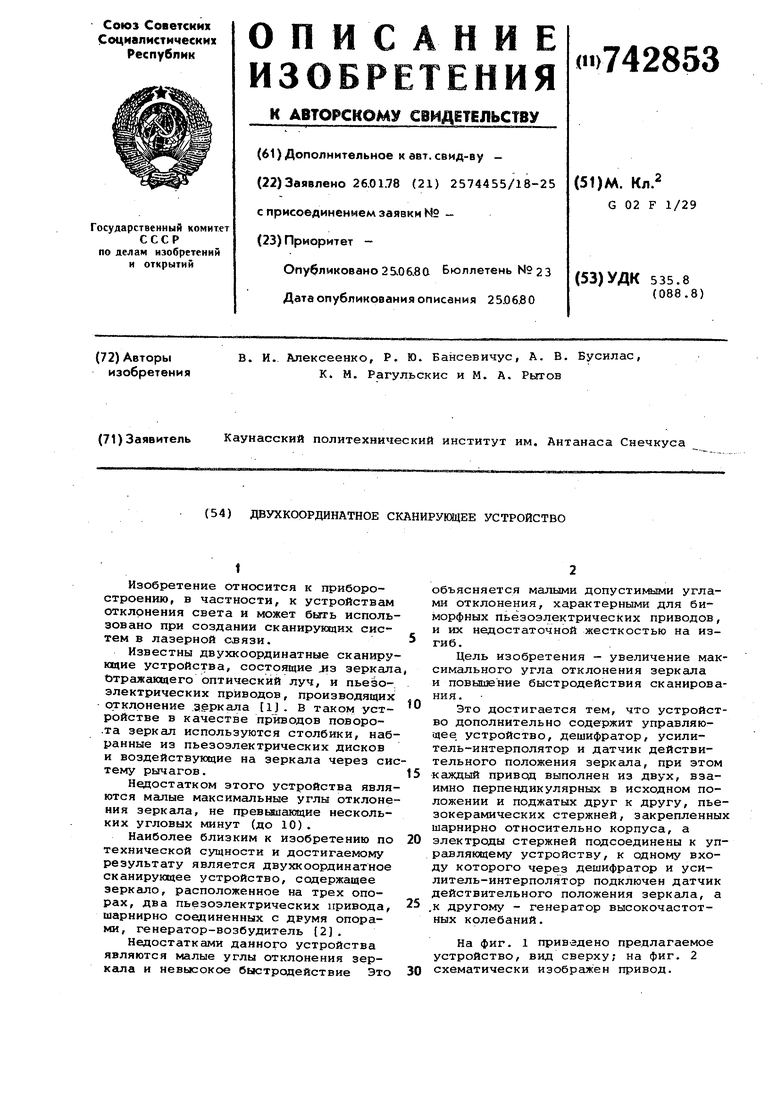

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления двухкоординатным пьезокерамическим оптическим дефлектором | 2018 |
|
RU2695281C1 |
| Сканирующее устройство | 1980 |
|
SU949618A1 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОКЕРАМИЧЕСКИЙ КОРРЕКТОР УГЛОВ НАКЛОНА ВОЛНОВОГО ФРОНТА | 2024 |
|
RU2837501C1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2005 |
|
RU2270997C1 |
| Сканирующее устройство | 1983 |
|
SU1121642A1 |
| Печатающее устройство | 1977 |
|
SU735446A1 |
| Устройство для обработки материалов | 2024 |
|
RU2830129C1 |
| ДВУХКООРДИНАТНЫЙ СКАНЕР ДЛЯ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ УЛЬТРАФИОЛЕТОВОГО ДИАПАЗОНА (ВАРИАНТЫ) | 2002 |
|
RU2193793C1 |
| Двухкоординатный наклономер | 1978 |
|
SU767515A1 |
| Печатающее устройство | 1980 |
|
SU885076A1 |
