Изобретение относится к областям электроакустики и радиотехники и может быть использовано в качестве устройства для послойной визуализации неоднородностей внутренних структур непрозрачных объектов.
Микроскопическое исследование внутренних объемов непрозрачных для световых электромагнитных излучений структур невозможно. Использование рентгеновского излучения не дает возможности микроскопических исследований из-за отсутствия фокусирующих устройств для спектра этого излучения. Так же обстоит дело при использовании более жестких излучений - альфа- или бета-излучений. Поэтому "просвечивание" объектов заменяют их "прозвучиванием" ультразвуковыми волнами - продольного или поперечного типов, которые принципиально не могут распространяться в отсутствии среды. Некоторым неудобством методов "прозвучивания" исследуемых объектов является необходимость визуализации получаемых в звуковом поле результатов.
Одним из перспективных направлений визуализации ультразвуковых изображений является ультразвуковая голография, в основе которой лежит интерференционный метод записи, воспроизведения и преобразования звуковых полей. Методы акустической голографии используются в звуковидении - получении изображения объектов с помощью акустических волн, для получения амплитудно-фазовой структуры отраженных и рассеянных полей, измерения характеристик направленности акустических антенн, пространственно-временной обработки акустических сигналов, образующихся от преобразования соответствующих электрических сигналов (см., например, Свет В.Д., Методы акустической голографии, Л., 1976; Ахмед М., Ван К., Мидерелл А., Голография и ее применение в акустоскопии, пер. с англ., "ТИИЭР", 1979, т.67, с.25; Зуйкова Н.В., Свет В.Д., Об одном оптическом методе восстановления акустической голограммы точечного источника, расположенного в неоднородном волноводе, "Акуст.ж.", 1981, т.27, с.513; Грегуш П., Звуковидение, пер. с англ., М., 1982). Самостоятельным разделом, основанным на использовании в том числе и акустической голографии, является томография, используемая в медицинской диагностике. Реконструктивная томография дает пространственное распределение параметров распространения звука - коэффициент затухания (аттенюационная модификация метода) или скорости звука (рефракционная модификация). В этом методе исследуемое сечение объекта прозвучивается многократно в различных направлениях, и информация о координатах прозвучивания и об ответных сигналах обрабатывается на ЭВМ, в результате чего на дисплее отображается реконструированная томограмма (см., например, Матаушек И., Ультразвуковая техника, пер. с нем., М., 1962).
Широко используется в технике ультразвук - в дефектоскопии, звуколокации, для контроля технологических процессов, очистки поверхностей металлов от окислов, при пайке алюминия и точечной сварке микроконтактов при изготовлении больших интегральных схем, в биологии и медицине (см., например, Бергман Л., Ультразвук и его применение в науке и технике, пер. с нем., 2 изд., М., 1957; Михайлов И.Т., Соловьев В.А., Сырников Ю.П., Основы молекулярной акустики, М., 1964; Физическая акустика, пер. с англ., под ред. У.Мэзона, Р.Терстона, т.1-7, М., 1966-74; Зарембо Л.К., Красильников В.А., Введение в нелинейную акустику, М., 1966; Ультразвуковая технология, под ред. Б.А.Аграната, М., 1974; Викторов И.А., Звуковые поверхностные волны в твердых телах, М., 1981).
Акустическая микроскопия - есть совокупность методов визуализации микроструктуры и формы малых объектов с помощью ультразвуковых и гиперзвуковых волн. Она включает в себя также методы измерения локальных характеристик упругих и вязких свойств объекта и их распределений по его поверхности или внутри объема. Акустическая микроскопия основана на том, что УЗ-волны, прошедшие, отраженные или рассеянные отдельными участками объекта, имеют различные характеристики (амплитуду, фазу и др.) в зависимости от локальных вязкоупругих свойств образца. Эти различия позволяют методами визуализации звуковых полей получать акустические изображения, восстанавливаемые компьютером на экране дисплея. В зависимости от способа преобразования акустических полей в видимое изображение различают сканирующую лазерную и сканирующую растровую акустическую микроскопию.
Сканирующая лазерная акустическая микроскопия представляет собой разновидность акустической голографии, предназначенную для визуализации малых объектов. При облучении плоской УЗ-волной объекта, помещенного в жидкость, фронт волны после про-хождения образца искажается из-за неоднородных фазовых задержек, а амплитуда изменяется в соответствии с неоднородностью коэффициента отражения и поглощения в объекте. Прошедшая волна падает на свободную поверхность жидкости и создает на ней поверхностный рельеф, соответствующий акустическому изображению объекта. Этот рельеф считывается световым лучом лазера и затем воспроизводится на экране дисплея после соответствующих преобразований амплитудно-фазового распределения сосчитанного световым пучком акустического рельефа. УЗ-микроскоп такого типа содержит излучающий УЗ-волну пьезоэлектрический преобразователь, через звукопровод связанный с наблюдаемым объектом, помещенным в иммерсионную жидкость. После прохождения объекта УЗ-волна создает на поверхности этой жидкости рельеф. На поверхность жидкости нанесена тонкая полупрозрачная пленка, которая деформируется вместе с жидкостью, повторяя ее рельеф. Луч лазера с помощью сканирующего устройства перемещается по поверхности пленки, частично отражаясь от нее. Отраженные углы от различных точек поверхности пленки отвечают созданному на ней рельефу, и с помощью фокусирующей оптики световой пучок воздействует на фотоприемник, предварительно проходя через оптический нож, преобразующий угловую модуляцию луча света в амплитудную. Видимое акустическое изображение объекта возникает на экране дисплея, развертка которого синхронизирована с движением лазерного луча по поверхности пленки. Другое аналогичное устройство визуализации строят на использовании прошедшего через объект лазерного луча, что позволяет сравнивать изображения, полученные при отражении и прохождении света через объект, получая при этом дополнительную информацию об объекте.
Используемый в сканирующей лазерной акустической микроскопии способ визуализации не позволяет получать высокое разрешение. Такие микроскопы работают на частотах вплоть до нескольких сотен МГц и дают разрешение до 10 мкм. Достоинством таких микроскопов является возможность одновременного получения оптического и акустического изображений для их сравнения.
В сканирующей растровой акустической микроскопии сфокусированный в точку УЗ-пучок перемещается по объекту, изображение которого воссоздается по точкам в виде растра. Сфокусированная УЗ-волна, падая на образец, частично отражается от него, частично поглощается и рассеивается в нем, а частично проходит через него. Принимая ту или иную часть излучения, можно судить об акустических свойствах образца в области, размеры которой определяются размерами фокального пятна. Эти размеры согласно теории дифракции по порядку равны длине волны УЗ-колебаний в данной среде.
Ближайшим аналогом (прототипом) заявляемому техническому решению может быть взят ультразвуковой микроскоп сканирующего растрового типа (см., например, Березина С.И., Лямов В.Е., Солодов И.Ю., Акустическая микроскопия, "Вестник МГУ", сер. "Физика, Астрономия", 1977, т.18, №1, стр. 3; а также Куайт К.Ф., Алталар А., Викрамасингхе Х.К., Акустическая микроскопия с механическим сканированием, "ТИИЭР", Обзор, 1979, т.67, №8, р.5), содержащий излучающий УЗ-волну пьезоэлектрический преобразователь, связанный через звукопровод с собирающей акустической линзой, которая в последующем звукопроводе собирает УЗ-волны в фокус малых размеров. Такая акустическая линза может представлять собой сферическое углубление в звукопроводе на границе его раздела с иммерсионной жидкостью. Образец при этом помещают в фокальную плоскость акустической линзы и перемещают в этой плоскости вдоль двух ортогональных осей координат этой плоскости с помощью специального сканирующего устройства. УЗ-излучение после взаимодействия с объектом собирается второй сферической акустической линзой, конструкция которой аналогична первой, и через звукопровод возбуждает второй пьезоэлектрический преобразователь, на выходе которого образуется электрический сигнал с частотой УЗ-колебаний генератора, возбуждающего УЗ-колебания в первом преобразователе. Этим сигналом управляется яркость электронного луча дисплея, у которого развертка синхронизирована с движением сканирующего устройства с помещенным в него образцом. При этом на экране дисплея возникает акустическое изображение, которое определяется распределением по образцу его физических свойств (упругости, плотности, вязкости, толщины, анизотропии и т.д.).
В зависимости от того, какая часть излучения после взаимодействия с объектом регистрируется, различают акустические микроскопы "на отражение", "на прохождение" "темного поля". При использовании микроскопа "на прохождение" пара акустических линз должна отвечать условию совмещения их фокальных плоскостей. В режиме "на отражение" используется одна и та же акустическая линза как для зондирования объекта УЗ-волной, так и для приема отраженной от объекта УЗ-волны. Акустическое изображение в режиме "темного поля" создается лучами, рассеянными объектом, и для его получения приемную (вторую) линзу в конфокальной системе отклоняют от акустической оси системы так, чтобы она собирала рассеянные лучи. Имеется еще один режим приема УЗ-волн - нелинейный, основанный на приеме не на основной частоте УЗ-колебаний соответствующего генератора УЗ-колебаний, а на ее гармониках.
К недостатку известного решения в режиме его работы "на отражение" (что представляется предпочтительным, а в ряде случаев - единственно возможным, например, в случае, когда объект содержит подложку из сильно отражающего слоя) следует отнести недостаточную разрешающую способность микроскопии по глубине исследуемого слоя образца, которая определяется длительностью импульса УЗ-зондирования, поскольку при использовании одного и того же пьезопреобразователя на передачу и прием УЗ-волн требуется их временное разделение, то есть работа в импульсном режиме. Стремление получить достаточно высокое разрешение по глубине объекта понуждает уменьшать длительность зондирующих УЗ-импульсов до величины, равной отношению удвоенного значения заданного разрешения по глубине к скорости распространения УЗ-волны в данном объекте. Жесткие требования к получению высокого разрешения по глубине могут связываться с необходимостью различения внутри объекта разных его неоднородностей в его различных по глубине слоях. Так, при скорости УЗ-волны в 3000 м/с для получения разрешения по глубине в 10 мкм необходимо сокращать длительность зондирующего импульса до величины 2·10-5/3·103=6,7·10-9 с=6,7 нс. Из теории радиотехники следует, что для передачи таких радиоимпульсов (например, в локационных системах) необходимо их частотное заполнение 300-1000 колебаниями несущей. В данном примере это означает применение частоты УЗ-колебаний порядка 45-150 ГГц, что принципиально неосуществимо, поскольку диапазон работы УЗ-микроскопов определяется от 50 МГц до 3 ГГц, при котором обеспечивается разрешение по поверхности объекта порядка 30-0,5 мкм, но не по его глубине (!). Возникающее принципиальное противоречие между требованиями обеспечения высокого разрешения по глубине и возможностями увеличения частоты УЗ-колебаний приводит к низкому разрешению по глубине в известных акустических микроскопах сканирующего растрового типа, работающих (притом вынужденно!) в режиме "на отражение". Так, при предельно высоком значении частоты гиперзвуковых колебаний в 3 ГГц, которое обеспечивает разрешение по поверхности в 0,5 мкм, получаем разрешение по глубине не лучше 0,5 мм=500 мкм, то есть на три порядка хуже, чем разрешение по поверхности. Следовательно, указанный недостаток известного устройства приводит к принципиальной неработоспособности микроскопа в случаях, когда необходимо различать глубинную структуру объекта с высокой разрешающей способностью, например, в 10 мкм.
Кроме того, в ряде случаев не представляется возможным исследовать объект в режиме "на прохождение" или в режиме "темного поля", при которых можно использовать непрерывные УЗ-колебания, а не импульсные, как в режиме "на отражение". Поэтому задача увеличения разрешения по глубине при использовании режима "на отражение" является крайне актуальной.
Указанный недостаток прототипа устранен в заявляемом техническом решении.
Целью изобретения является увеличение разрешающей способности по глубине исследуемого образца в режиме работы ультразвукового микроскопа "на отражение".
Указанная цель достигается в заявляемом техническом решении, содержащем последовательно акустически связанные преобразователь УЗ-колебаний, звукопровод, акустическую линзу и иммерсионную среду, связанную с исследуемым объектом, помещенным в фокальную плоскость акустической линзы и перемещаемым в ней двухкоординатным сканирующим устройством, а также дисплей, развертка в котором соотнесена с работой двухкоординатного сканирующего устройства, и отличающемся тем, что в него включены последовательно соединенные генератор линейно-частотно-модулированных импульсов, коммутатор, широкополосный усилитель, согласованный фильтр на дисперсионной линии задержки, компенсирующий усилитель, амплитудный детектор, пороговое устройство, временной селектор и компьютер, подключенный выходом к дисплею, а также генератор синхронизирующих импульсов, выходы которого подключены к синхровходам генератора линейно-частотно-модулированных импульсов, коммутатора, временного селектора, двухкоординатного сканирующего устройства и компьютера, первый управляющий выход компьютера подключен ко второму входу временного селектора, второй - к управляющему входу двухкоординатного сканирующего устройства, выход которого соединен со вторым информационным входом компьютера, а второй вход-выход коммутатора соединен с преобразователем УЗ-колебаний.
Достижение указанной цели обеспечивается благодаря временному "сжатию" широкополосного линейно-частотно-модулированного зондирующего объект УЗ-импульса достаточно большой длительности в дисперсионной линии задержки (ДЛЗ), согласованной с модуляционными параметрами зондирующего сигнала, отраженного от неоднородностей исследуемого слоя объекта. Получаемое высокое разрешение по глубине позволяет проводить послойную реконструкцию всех имеющихся неоднородностей в исследуемом объекте в их совокупности и раздельно (то есть послойно) на экране дисплея после предварительной обработки информации в компьютере.
Заявляемое техническое решение поясняется прилагаемыми чертежами. Общая структурная схема ультразвукового микроскопа приведена на фиг.1 и содержит следующие элементы и узлы:
1 - преобразователь УЗ-колебаний, например, пьезоэлектрическую пластину,
2 - звукопровод (с малым погонным затуханием УЗ-волны),
3 - акустическую линзу (ее показатель преломления выбирается большим показателя преломления звукопровода для соответствующей УЗ-волны),
4 - иммерсионную среду (обеспечивает контакт между звукопроводом и объектом, так как велики потери УЗ-колебаний в воздухе),
5 - исследуемый объект (образец), имеющий, например, многослойную структуру,
6 - звукопоглощающую среду (для гашения паразитных отражений от границы объекта),
7 - указанную в объекте (образце) неоднородность, подлежащую визуализации,
8 - подставку микроскопа (предметный столик, корпус микроскопа),
9 - двухкоординатное сканирующее устройство,
10 - коммутатор, обеспечивающий режим "передача-прием",
11 - генератор линейно-частотно-модулированных импульсов (ГЛЧМ),
12 - широкополосный усилитель (ШУ),
13 - согласованный фильтр (СФ) на дисперсионной линии задержки (ДЛЗ),
14 - компенсирующий усилитель (КУ), малошумящий широкополосный усилитель,
15 - амплитудный детектор (АД),
16 - пороговое устройство (ПУ) - по максимуму с установленным порогом,
17 - временной селектор (ВС) - с управляемым от компьютера скользящим временным "окном" выборки импульсных сигналов-откликов ДЛЗ,
18 - компьютер (с двумя информационными входами и одним выходом, входом синхронизации и двумя выходами управления - к двухкоординатному сканирующему устройству и к временному селектору),
19 - дисплей,
20 - генератор синхронизирующих импульсов (ГСИ), создающий импульсные последовательности с кратными частотами.
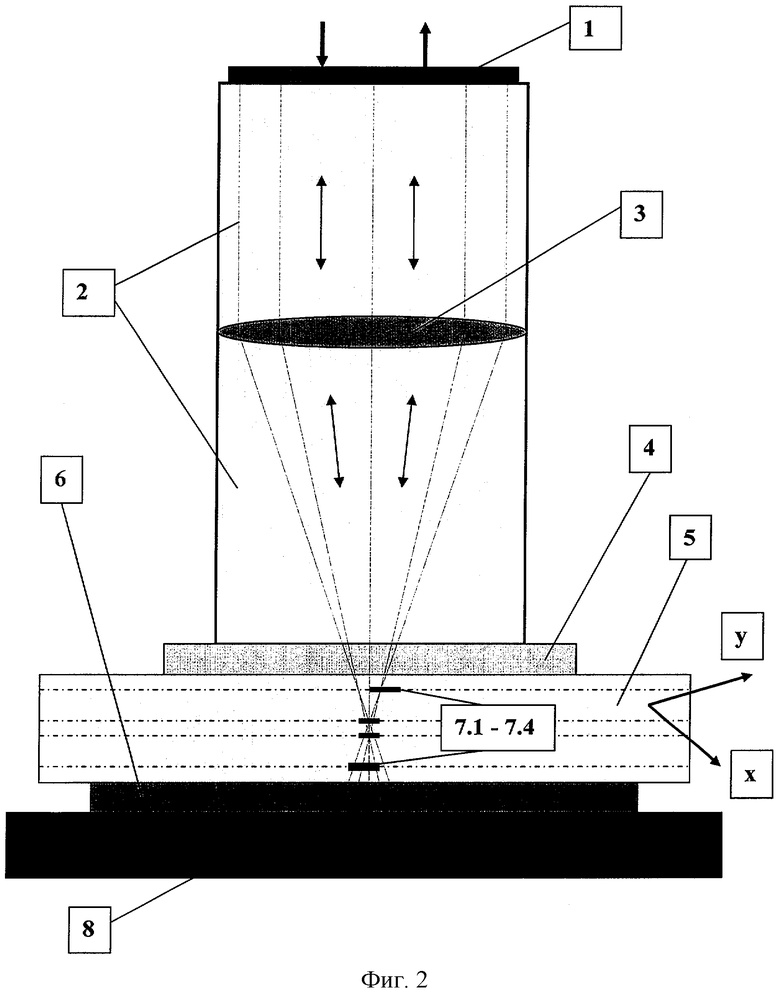
На фиг.2 в укрупненном масштабе поясняется принцип устройства акустического тракта ультразвукового микроскопа (УМ) с указанными на фиг.1 компонентами. В объекте указаны неоднородности 7.1-7.4, находящиеся в разных слоях объекта, раздельно разрешаемых УМ (эти слои, содержащие неоднородности, указаны пунктиром на объекте). Показано, что неоднородности 7.2 и 7.3 совмещены с фокусом акустической линзы, то есть полностью попадают в пятно сфокусированного УЗ-поля, а неоднородности 7.1 и 7.4 лишь частично попадают в поле УЗ-излучения при заданных координатах Х и Y установки объекта двухкоординатным сканирующим устройством (на рис.2 последнее не показано).
На фиг.3 приведены три временные диаграммы: периодической последовательности синхроимпульсов от ГСИ 20 с периодом следования Ти, определяющим скорость считывания информации об объекте в данной точке, последовательности генерируемых в ГЛЧМ 11 зондирующих импульсов (указанных условно заштрихованными треугольниками по признаку изменяющейся линейно во времени частоты несущих колебаний) с длительностью импульсов τи, а также диаграммы работы коммутатора 10 на передачу и прием УЗ-сигналов, подаваемых на преобразователь УЗ-колебаний 1 при передаче и снимаемых с него при приеме (положительные укороченные по времени сигналы соответствуют работе коммутатора на передачу, а отрицательные удлиненные - на прием).
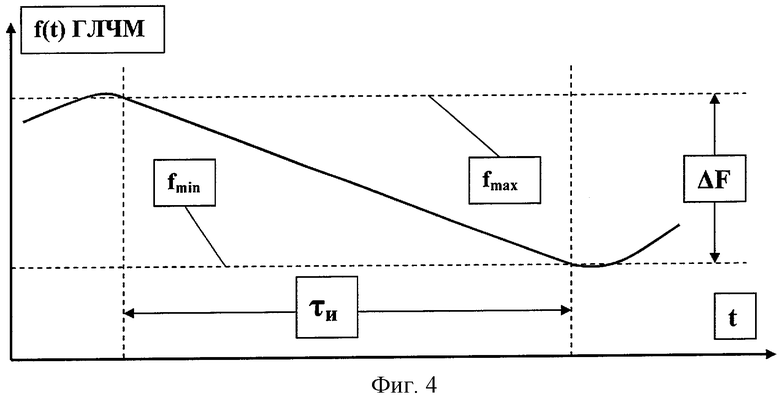
На фиг.4 приведена частотно-временная характеристика излучаемого ЛЧМ УЗ импульса (с падающей характеристикой, что не принципиально) длительностью τи, с полосой перестройки ΔF соответственно от максимальной рабочей частоты ГЛЧМ 11 fmax до минимальной рабочей частоты fmin.
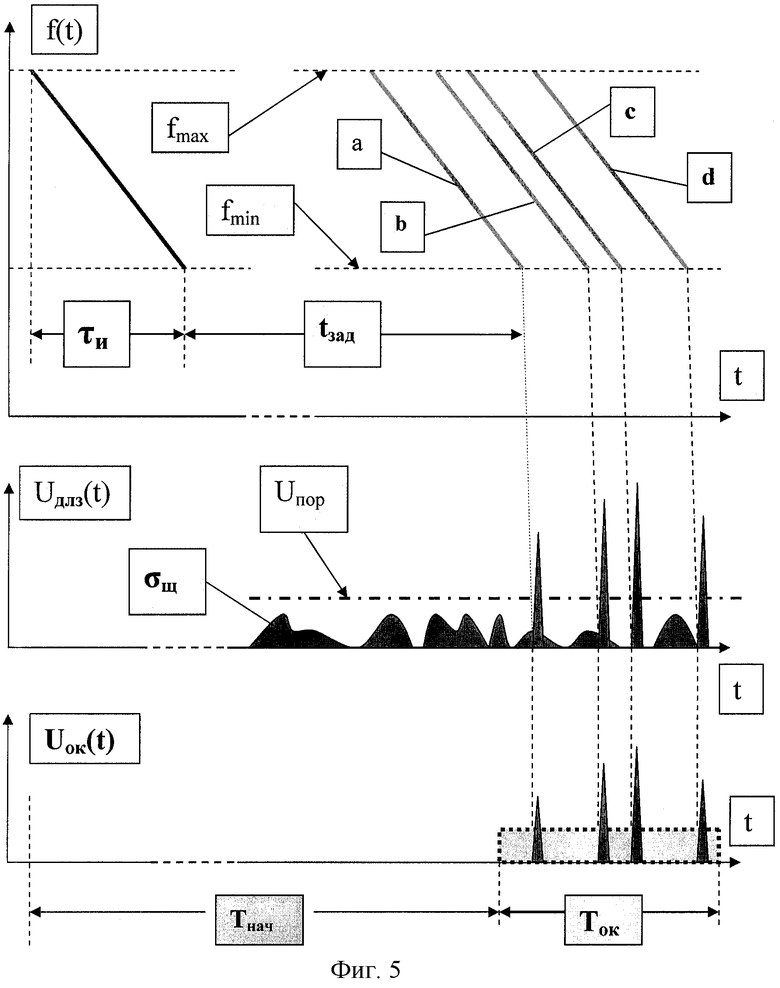
На фиг.5 приведены временные диаграммы:
- зондирующего УЗ-ЛЧМ-импульса и четырех отраженных от неоднородностей 7.1-7.4 (рис.2) объекта УЗ-ЛЧМ-импульсов а, b, с и d. Их разделение по времени прихода показано условно, не в правильном масштабе по времени, чтобы обеспечить наглядность рассмотрения;
- сигналов-откликов с выхода ДЛЗ согласованного фильтра 13, представляющих собой δ-импульсы сверхмалой длительности, в смеси с шумом, отсекаемым пороговым устройством 16 при заданном пороге ограничения по максимуму Uпор, величина которого выбирается из заданных вероятностных характеристик правильного обнаружения полезных сигналов на фоне "белого" шума со среднеквадратическим напряжением шума σш;
- импульсных сигналов на выходе временного селектора 17 в заданном компьютером 18 скользящем временном "окне" длительностью Tок (начало этого импульса "окна" выбирается при настройке УМ и может регулироваться). Импульсы "окна" строго синхронизированы с тактовыми импульсами ГСИ 20, то есть следуют периодически (с периодом следования зондирующих импульсов Ти).
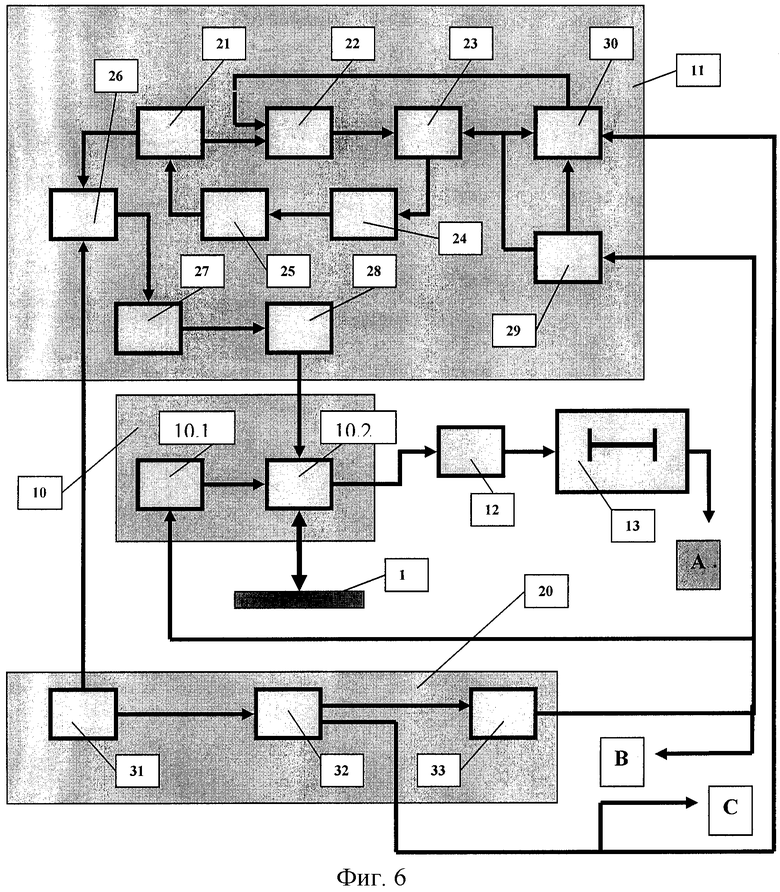
На фиг.6 представлена блок-схема электронного оборудования УМ, в частности, раскрыта структура ГЛЧМ 11, коммутатора 10, ГСИ 20 и их связей между собой и другими узлами УМ.
ГЛЧМ 11 состоит из следующих элементов:
21 - управляемого по частоте генератора ЛЧМ колебаний,
22 - делителя частоты с управляемым коэффициентом деления (ДПКД),
23 - фазового детектора,
24 - фильтра нижних частот (инерционного или интегрирующего звена),
25 - управителя частоты (усилителя постоянного тока),
26 - смесителя (для переноса спектра ЛЧМ-сигналов в требуемый диапазон),
27 - полосового фильтра (формирующего спектр зондирующего сигнала),
28 - согласующего усилителя мощности ЛЧМ-импульсов зондирования объекта,
29 - формирователя опорных импульсов для фазового детектора и датчика старт-стопных импульсов начала и конца ЛЧМ-импульсов, управляющих работой устройства задания кодов для ДПКД 22,
30 - устройства задания кодов управления ДПКД 22.
ГСИ 30 состоит из следующих узлов:
31 - высокочастотного генератора опорного сигнала с кварцевой стабилизацией, вырабатывающего гармонические колебания частоты f1,
32 - высокочастотного делителя частоты, кратно понижающего частоту генератора 31 до величины, равной f2=f1/K1=ΔF,
33 - делителя частоты с коэффициентом деления К2, равным K2=f2 Tи, на выходе которого образуется периодическая последовательность импульсов с частотой следования зондирующих импульсов в ГЛЧМ 11 - частотой f3=1|Ти.
Коммутатор 10 включает формирователь импульсов коммутации 10.1 с частотой их следования f3 и длительностью τи, например, синхронизируемый одновибратор, и собственно коммутирующее аналоговое устройство 10.2, например, выполненное на p-i-n-диодах для получения высокого быстродействия коммутации и обеспечения надежной развязки между передающим и приемным каналами (аналог маломощного антенного переключателя в локационных системах).
На этом же чертеже показаны связи коммутатора 10 с ШУ 12 и СФ 13. Связи А, В и С показаны для объяснения последующих соединений на рис.7.
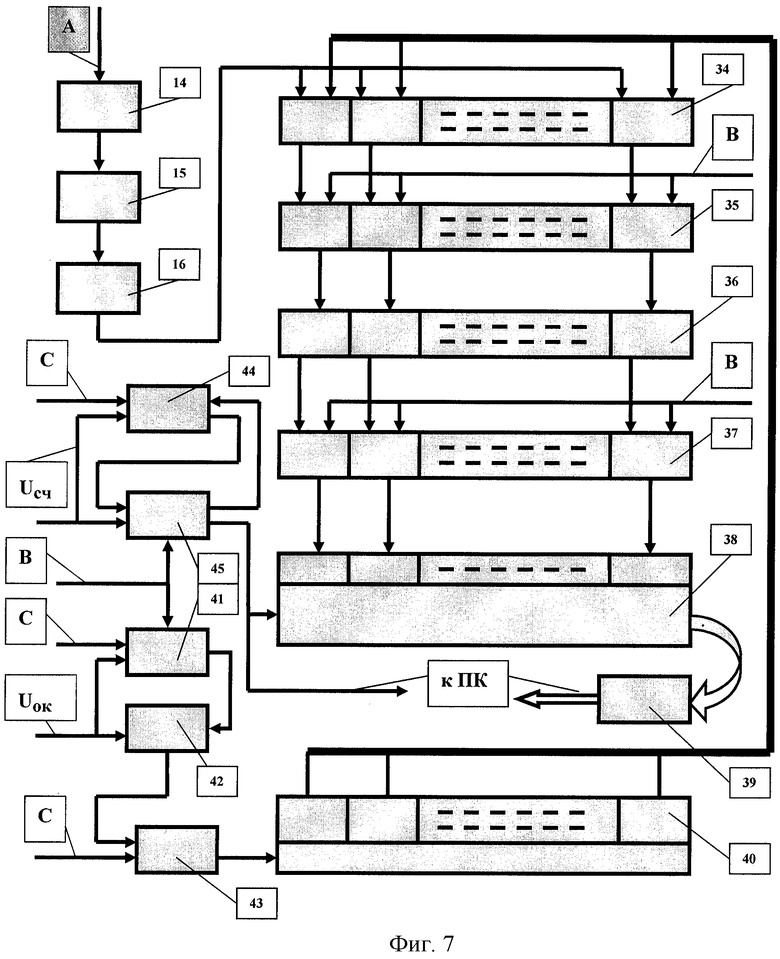
На фиг.7 приведена блок-схема электронного тракта на узлах КУ 14, АД 15 и ПУ 16 и более подробно рассмотрена структура временного селектора ВС 17. Последний содержит следующие элементы и узлы:
34 - линейку быстродействующих аналоговых ключей с числом ключей в линейке N,
35 - линейку из N аналоговых запоминающих амплитуду сигнала устройств,
36 - линейку из N быстродействующих аналого-цифровых преобразователей (АЦП),
37 - линейку из N цифровых накапливающих сумматоров с числом последовательных накоплений М, каждый из которых формирует, например, байтовый цифровой сигнал, то есть 8-разрядный двоичный код накопленного за М циклов сигнала, определяющего амплитуду сигнала на выходе ДЛЗ в СФ 13 (или его амплитуду на выходе ПУ 16). Отметим сразу же, что разрядность сумматоров 37 может быть задана иной - больше или меньше байтовой - в зависимости от предъявленных к УМ требований по величине вероятности правильного обнаружения полезной информации;
38 - N-разрядный параллельный регистр сдвига байтовых (или иной разрядности) кодов, преобразующих цифровые байтовые коды в последовательный побайтово код,
39 - быстродействующий цифроаналоговый преобразователь (ЦАП), преобразующий поступающие на его вход последовательные байтовые кодовые сигналы (от соответствующих последовательно опрашиваемых цифровых накопителей линейки 37) в аналоговые сигналы, передаваемые по видеовходу на компьютер 18 (на его видеокарту),
40 - дешифратор, формирующий на своих N выходах сигналы разрешения для считывания аналоговых сигналов элементами линейки 37, поступающих с выхода ПУ 16.
Формирование сигналов управления работой дешифратора 40 осуществляется на элементах:
41 - пересчетной схеме (делителе частоты) с коэффициентом деления N, включаемой на пересчет сигнала тактовой частоты f2=ΔF стартовым импульсом Uок начала временного "окна" Тнач, поступающим от выхода управления компьютера 18, и выключаемой по мере выдачи от схемы импульса переноса (от N-го сосчитанного схемой импульса),
42 - RS-триггера, запускаемого от импульса начала временного "окна" и перебрасываемого в исходное состояние от импульса переноса схемы 41,
43 - ключевой схемы (схемы "И"), на выходе которой генерируется пачка их N импульсов частоты f2=ΔF, которыми в дешифраторе 40 осуществляется последовательное переключение логических уровней на его выходах.
Формирование сигналов управления работой N-разрядного параллельного регистра сдвига 38 осуществляется на элементах:
44 - второй пересчетной схеме (делителе частоты), аналогичной схеме 41, с коэффициентом деления р, на выходе которой образуется последовательность импульсов с частотой их следования f4=f2/p, запуск этой пересчетной схемы осуществляется по импульсу считывания информации Uсч в момент времени Tсч, а остановка - импульсом переноса счетчика-делителя на N, поступающего из схемы 45;
45 - генератора пачки из N импульсов частоты f4 на пересчетной схеме-делителе частоты на N, на втором RS-триггере, аналогичном триггеру 42, и на схеме "И", аналогичной схеме 43. Триггер открывается по импульсу Uсч, поступающему либо из компьютера 18 (синхронный режим обмена с компьютером), либо вырабатываемому в самой электронной схеме УМ с небольшой задержкой после окончания импульса временного "окна" (асинхронный режим обмена), а закрывается импульсом переноса делителя на N. На схему "И" поступают сигнал Uсч - импульс длительностью Тсч≥N/f4=pN/f2 и пачка из N импульсов частоты f4. При этом в компьютер 18 поступает сигнал о начале передачи в него данных (аналоговой информации) с выхода ЦАП 39. RS-триггер этой схемы также переходит в исходное состояние по мере завершения цикла формирования в схеме 45 пачки импульсов. Снижение частоты следования этих импульсов в пачке в р раз позволяет снизить скорость выдачи данных на компьютер 18 до величины, соответствующей быстродействию видеокарты компьютера. Структура схемы 45 не раскрыта поблочно, поскольку понятна из приведенных данных.
Дублирование установки пересчетных схем 41 и 45 в исходное состояние осуществляется по опорным импульсам частоты f3, синхронизирующих генерирование зондирующих ЛЧМ-импульсов.
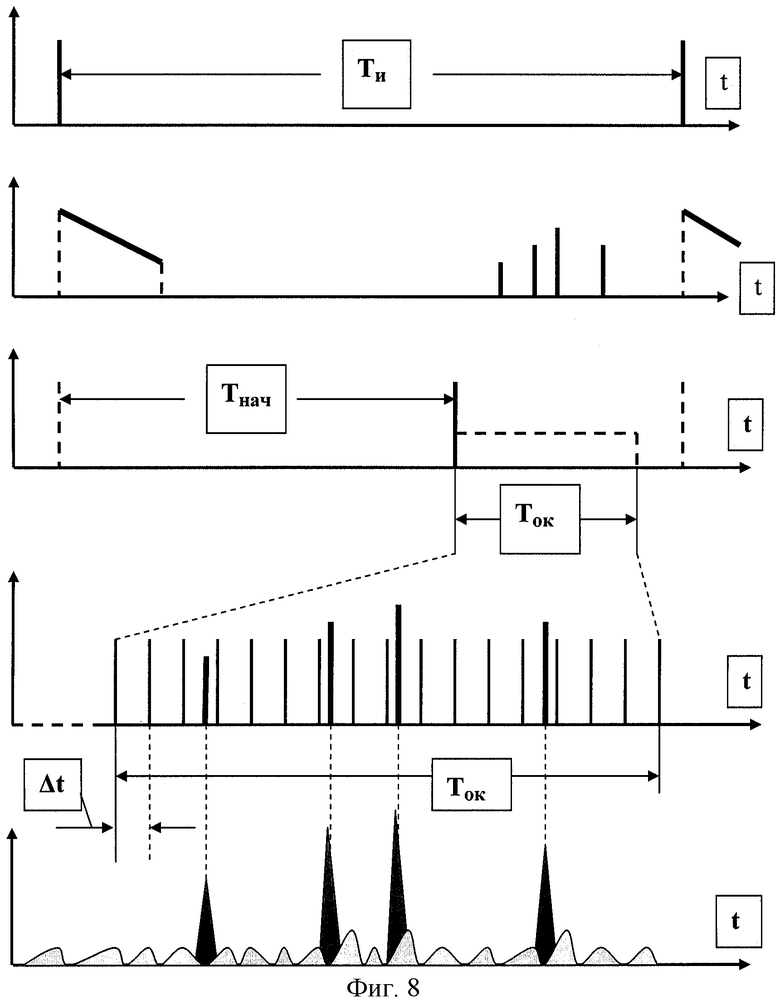
На фиг.8 представлены временные диаграммы процесса формирования полезных сигналов от обнаруженных в разных слоях объекта 5 неоднородностей 7.1-7.4 (фиг.2):
- опорные синхроимпульсы с периодом повторения Тн;
- один из периодов с зондирующим УЗ-ЛЧМ-импульсом и откликами с выхода ПУ 16;
- импульс начала временного "окна", задержанный на время Тнач относительно опорного, и импульс самого временного "окна" (показан для отличия пунктиром) длительностью Ток;
- полезные сигналы-отклики от неоднородностей 7.1-7.4, располагаемые в соответствующих временных интервалах временного "окна" с числом таких интервалов N. Эта диаграмма дана не в масштабе, использованном выше по диаграмме, для удобства представления временного "окна" с разделением его на N временных интервалов величиной Δt=1/ΔF, каждый из которых соответствует определенному слою по глубине исследуемого объекта (в данном рассмотрении число таких раздельно разрешаемых слоев равно N);
- выделенные и переданные в компьютер результирующие полезные сигналы-отклики по обнаруженным неоднородностям в смеси с неизбежным шумом, соотнесенные с таковыми на предыдущей диаграмме.
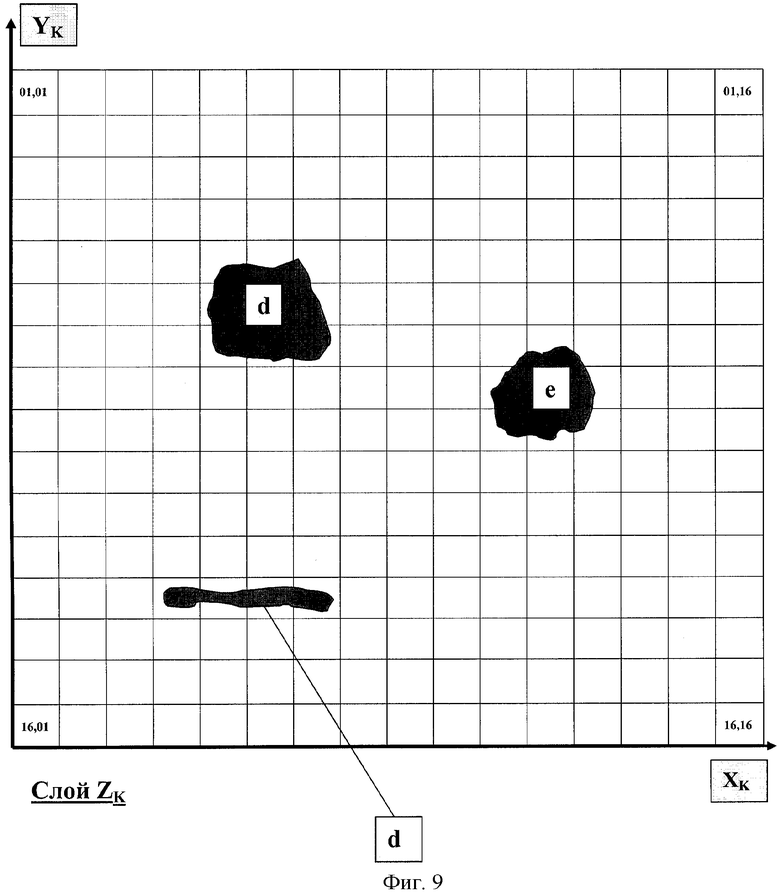
На фиг.9 дан пример изображения на экране дисплея 19 трех неоднородностей, наблюдаемых в k-м слое объекта (координата слоя Zk), где k=1, 2, 3, ... N;
- неоднородность d, проявившаяся с разрывом в данном слое с координатами X4-Х7, Y13 - в первой части неоднородности d и с координатами X5-Х7, Y5-Y7 - во второй части этой неоднородности; в других слоях можно будет обнаружить, что эти два фрагмента действительно составляют единую неоднородность;
- неоднородность е с координатами Х11-X13, Y7-Y9.
При этом для наглядности рассмотрения рабочее поле было поделено на 16×16 зон наблюдения, хотя на самом деле число таковых может быть произвольным, так как работой двухкоординатного сканирующего устройства 9 управляет компьютер 18 по воле и требованиям оператора.
Число наблюдаемых поверхностных зон объекта, образующих прямоугольный растр размерностью m×n (где m - число точечных зон в строке растра, n - число строк растра), задается программой обработки информации в компьютере 18 по указанию оператора, и при этом компьютер управляет работой двухкоординатного сканирующего устройства 9. По мере съема информации от всех точек растра для заданного диапазона глубин просмотра объекта (в N смежных слоях) формируется изображение объекта на дисплее 19.
Рассмотрим действие заявляемого устройства - ультразвукового микроскопа (УМ).
Возникающее при разработке ультразвуковых микроскопов, работающих в режиме "на отражение", противоречие между необходимостью сокращать длительность зондирующих УЗ-импульсов для обеспечения высокого разрешения по глубине (раздельного рассмотрения двух смежных тонких слоев внутри объекта) и необходимым количеством УЗ-колебаний (300-1000), содержащихся внутри такого УЗ-импульса, приводит к необходимости увеличения частоты УЗ-колебаний. Однако последнее имеет своим естественным пределом экзотическую гиперзвуковую частоту порядка 3 ГГц, величина которой явно недостаточна для разрешения по глубине лучше 100-150 мкм, что в ряде случаев совершенно не удовлетворяет требованиям потребителя. Разрешение этого противоречия в заявляемом техническом решении достигнуто благодаря специальному методу обработки сложных широкополосных УЗ-сигналов типа линейно-частотно-модулированных (ЛЧМ) УЗ-колебаний, перенесенных на соответствующие электрические ЛЧМ-колебания, в согласованном фильтре, содержащем дисперсионную ультразвуковую линию задержки (ДЛЗ), которая "сжимает" выходной электрический сигнал в сверхкороткий импульс, длительность которого достаточна для временного его разрешения от других аналогичных импульсов, полученных от зондирования неоднородностей объекта в его других близлежащих к данному слоях.
В том случае, когда частотно-временная характеристика ЛЧМ-сигнала - отклика ЛЧМ-УЗ-импульса, отраженного от объекта (отдельных его компонент), совпадает с адекватным ей распределением на пьезоэлектрической пластине ДЛЗ встречно-штыревых преобразователей с учетом скорости распространения в такой пластине поперечной УЗ-волны, на выходе такого встречно-штыревого преобразователя в момент указанного совпадения возникает короткий δ-импульс, длительность которого равна tсж=1/ΔF, где ΔF - полоса спектра частот в ЛЧМ-импульсе, равная частотной перестройке по линейному закону колебаний УЗ-несущей, вырабатываемых в ГЛЧМ 11 (фиг.1), то есть ΔF=fmax-fmin, где fmax и fmin - соответственно верхняя и нижняя граничные рабочие частоты генерируемых в ГЛЧМ 11 колебаний, при этом df/dt=const(t) и скорость изменения частоты df/dt=ΔF/τн, где τн - длительность зондирующего объект ЛЧМ-импульса. Произведение широкополосности ЛЧМ-сигнала на его длительность называется базой ЛЧМ-сигнала (это же понятие относится и к ДЛЗ) В=ΔFτн. Можно показать, что чем больше база сигнала (и соответствующей ему ДЛЗ), тем выше энергетический потенциал системы обнаружения малоразмерной неоднородности в объекте. Чем шире полоса спектра ЛЧМ-сигнала ΔF (и соответствующей согласованной с ним ДЛЗ), тем короче образуется на выходе ДЛЗ радиоимпульс, то есть тем выше разрешающая способность УМ по глубине Δd=V/2ΔF. Так, при скорости УЗ-волны V=3×103 м/с получение разрешающей способности по глубине Δd=5 мкм требует расширения полосы спектра ЛЧМ-импульса до величины ΔF=300 МГц. При этом на выходе ДЛЗ возникает радиоимпульс длительностью tсж=3,3 нс. Как показывает простейший анализ, для обеспечения условия нормальной работы системы обработки сигналов τн f0=300-1000, где f0=(fmin+fmax)/2 - среднее значение частоты несущих ЛЧМ-колебаний, достаточно иметь fmin=ΔF/2, откуда получаем условие для минимально допустимого значения длительности зондирующего ЛЧМ-импульса τн≥2BΔd/V=(600-2000)Δd/V (при этом полагаем, что база ДЛЗ равна В=300-1000. При заданных условиях и при ДЛЗ с базой В=600 длительность зондирующего ЛЧМ-импульса равна или больше величины τи=2 мкс, так что tсж=τи/В. Таким образом, поставленному условию разрешения по глубине в 5 мкм отвечает ЛЧМ-УЗ-импульс длительностью 2 мкс с полосой перестройки в 300 МГц при использовании ДЛЗ с базой В=600, выполненной, например, на пьезопластинке из монокристалла ниобата лития LiNbO3 с ориентацией У+128°, X, имеющего наиболее высокий коэффициент электромеханической связи, или на пластинке пьезокварца SiO2 ST- или Х-срезов, для которых характерен нулевой ТКЧ (температурный коэффициент частоты). В настоящее время технология производства ДЛЗ с большими величинами базы достаточно хорошо налажена, и эти линии нашли широкое применение в радиолокации в качестве согласованных фильтров, обеспечивающих прекрасную разрешающую способность локационных систем по дальности и радиальной скорости лоцируемых объектов, например, в доплеровских локационных системах [1-6].
Пусть ГЛЧМ 11 (фиг.1) излучает короткий ЛЧМ-импульс с широким спектром, который через коммутатор 10 поступает на преобразователь УЗ-колебаний 1, связанный со звукопроводом 2, включающим акустическую линзу 3, выполненную из акустопрозрачного материала с большим показателем преломления для акустической волны, чем показатель преломления звукопровода. Акустическая линза сферической формы собирает УЗ-лучи в фокальной плоскости с кружком рассеяния в фокусе, диаметр которого определяется известным дифракционным соотношением dф=1,22λF/Dоб, где λ=V/f - длина волны УЗ-колебаний частоты f, F и Dоб - фокусное расстояние и диаметр апертуры акустической линзы 3. Кружок рассеяния определяет разрешающую способность УМ по поверхности объекта (по Х- и У-координатам), зависящую от качества акустического объектива и длины УЗ-волны и имеющую порядок величины последней. Так, для получения разрешения по поверхности объекта порядка 10 мкм частота УЗ-колебаний должна иметь порядок 300 МГц и выше.
Проходя иммерсионную среду 4, связывающую звукопровод 2 с объектом 5, УЗ-колебания последовательно отражаются в объекте 5 от имеющихся на пути УЗ-волны неоднородностей, расположенных на разных глубинах внутри объекта - в разных его слоях. Каждое из таких отражений имеет свою определенную временную задержку, значение которой в дальнейшем определяется наряду с другим параметром отражения - его интенсивностью. В объекте 5 на фиг.1 показана такая неоднородность 7 в слое, указанном пунктирной линией. Полная задержка УЗ-импульса в звукопроводящем тракте (включая все его элементы и сам объект) Δtзад определяется размерами звукопроводящей части УМ и должна быть существенно большей длительности зондирующего ЛЧМ-УЗ-импульса Δtзад>τи. Это обеспечивает надежную коммутацию отраженного от объекта сигнала, снимаемого с преобразователя УЗ-колебаний 1, в тракт обработки ЛЧМ-сигнала с помощью коммутатора 10.
Работа коммутатора 10 синхронизирована с работой ГЛЧМ 11 от ГСИ 20 на частоте f3 следования зондирующих импульсов. Работой коммутатора 10, выполненного, например, на p-i-n-диодах, управляет синхронизируемое спусковое устройство, открывающее коммутатор 10 на передачу сигнала ГЛЧМ 11 к преобразователю УЗ-колебаний 1 в течение короткого периода времени (несколько большего длительности зондирующего импульса) и на прием сигнала от преобразователя УЗ-колебаний 1 и его передачу в тракт обработки ЛЧМ-сигналов в течение оставшегося промежутка времени, несколько меньшего промежутка (Ти-τи), где Ти=1/f3 - период следования ЛЧМ-импульсов, как это видно из нижнего графика на фиг.3. Важно отметить, что преобразователь УЗ-колебаний 1 является линейным элементом, из чего следует, что все компоненты отраженного сигнала от совокупности неоднородностей объекта в зоне его просмотра, расположенных в разных слоях объекта (то есть создающих разные временные задержки в отраженных сигналах), будут переданы в тракт обработки без взаимного подавления слабого сигнала сильным, то есть без потери информации о неоднородностях.
Принятые ЛЧМ-сигналы усиливаются в линейном широкополосном усилителе 12 (с полосой пропускания не менее AF) и поступают на согласованный фильтр 13, выполненный на ДЛЗ, согласованной с ЛЧМ-сигналом и имеющей базу В. Указанные на фиг.2 неоднородности 7.1-7.4 в разных слоях объекта (отмеченных пунктирными линиями), как нетрудно понять, создают четыре отраженных компоненты ЛЧМ-сигналов, одинаковых по частотно-временной структуре, но соответственно сдвинутых по времени, как это указано на верхнем графике рис.5, относительно зондирующего ЛЧМ-импульса на tзад (разные для разных неоднородностей 7.1-7.4). Кроме того, различаться в этих компонентах будут также и амплитуды в зависимости от характеризующих неоднородность параметров (дисперсии, отражательной способности, звуковязкости и т.д.), размеров и ориентации относительно кружка рассеяния акустического объектива 3. Так, на среднем графике фиг.5 видно, что неоднородности 7.2 и 7.3 создают более сильный сигнал, чем неоднородности 7.1 и 7.4, которые лишь частично перекрывают ультразвуковой поток в зоне просмотра (см. фиг.2).
Согласованный фильтр 13 с использованием в нем ДЛЗ может быть построен по различным известным схемам [7-11], предложенным автором данной заявки, которые позволяют существенно увеличить отношение сигнал/шум и вероятность распознавания.
С выхода ДЛЗ СФ 13 от указанных неоднородностей, расположенных в объекте в его разных слоях, возникающие при "сжатии" δ-радиоимпульсы в смеси с неизбежным шумом поступают на компенсирующий усилитель 14, являющийся широкополосным линейным усилителем, а от него - на вход линейного амплитудного детектора 15 и далее на пороговое устройство 16, порог в котором выбран так, что отсекаются шумовые компоненты совокупного сигнала, но пропускаются в несколько масштабно искаженном виде полезные составляющие, несущие информацию об обнаруженных неоднородностях в виде времени появления сигнальных импульсов (что связано с глубиной расположения в объекте неоднородностей) и амплитуды отклика от них.
Отношение сигнал/шум однозначно определяет обнаружительные вероятностные характеристики УМ. Вероятность обнаружения Робн полезного сигнала на фоне нормального (гауссова) шума в соответствии с критерием Неймана-Пирсона определяется отношением сигнал/шум μ на входе решающего устройства с установленным в нем нормированным порогом αпор=Uпор/σш, где Uпор - пороговое напряжение, σш - среднеквадратическое напряжение шума на входе решающего устройства (или на выходе ДЛЗ), и вычисляется из выражения: Робн=Ф(μ-ϕш),
где  - интеграл вероятности, а вероятность ложных тревог Рлт=1-Ф(αш).
- интеграл вероятности, а вероятность ложных тревог Рлт=1-Ф(αш).
Для обычно задаваемых при расчетах величинах вероятностей обнаружения и ложных тревог требуемое отношение сигнал/шум определяется из выражения:
μmin=Ф-1(1-Pлт)+Ф-1(Pобн)
где Ф-1(х) - обратный интеграл вероятности. Если качество системы обнаружения известно, то есть известна спектральная плотность шума на входе обнаружителя Gш, то на основании известного выражения для отношения сигнал/шум на входе согласованного фильтра μ*=(2Ес/Gш)1/2, где Ес=Рвхτи - энергия входного сигнала (Рвх - его входная мощность), полагая μ*=μmin; получим величину потребной энергии сигнала на входе согласованного фильтра, которая обрабатывается в нем, равную: Еc min=(Gш/2)[Ф-1(1-Рлт)+Ф-1(Робн)].
Вместо вероятности ложных тревог часто пользуются значением частоты ложных тревог Fлт, которая находится из выражения Fлт=<fш>exp(-Uпор 2/2σш), где <fш> - среднеквадратическое значение полосы шума, которое может описываться как <fш>=(f0 2+ΔF2/12)1/2. Величину порогового напряжения Uпор вычисляют по формуле Uпор=σш[2ln(<fш>/Fлт)]1/2. Полученное значение порогового напряжения подставляют в выражение для вероятности обнаружения Робн, находя ее, для полученной величины отношения сигнал/шум на выходе согласованного фильтра. В зависимости от возникших условий эксперимента либо принимают решение на увеличение времени обзора данной неоднородности в заданной зоне просмотра объекта, либо уменьшения этого времени (например, вариацией числа накоплений М). Для этого программа работы компьютера должна быть достаточно гибкой, чтобы удовлетворять различным возникающим требованиям пользователя.
С выхода ПУ 16 очищенные в основном от помех сигналы воздействуют на временной селектор 17 импульсов от соответствующих неоднородностей, попадающих во временное "окно" скользящего типа для просмотра разных групп смежных слоев объекта. На нижнем графике фиг.5 показано это временное "окно" (точечным пунктиром) длительностью Ток=N/ΔF, пропускающее для анализа заданное число одновременно просматриваемых N слоев объекта по его толщине. Число N удобно задавать фиксированным, так как это определяется аппаратурной конфигурацией, а величина 1/ΔF, как ясно из предыдущего, определяет временное разрешение в потоке импульсов с выхода ПУ 16, то есть разрешающую способность УМ по глубине (толщину слоя). В данном изображенном на фиг.2 случае четырех обнаруживаемых неоднородностей во временное "окно" попало четыре "сжатых" импульса, информацию о которых надо зафиксировать и передать на компьютер 18 - время появления и амплитуду импульсов для последующей реконструкции видимого на дисплее 19 изображения неоднородностей послойно или в их объемной композиции.
Кратко рассмотрим отдельные узлы заявляемого технического решения.
На фиг.6 более подробно рассмотрены блок-схемы трех узлов - ГЛЧМ 11, коммутатора 10 и ГСИ 20.
ГЛЧМ 11 содержит последовательно соединенные высокочастотный управляемый по частоте генератор ЛЧМ колебаний 21, делитель частоты с управляемым коэффициентом деления 22, фазовый детектор 23, фильтр нижних частот 24 (инерционное или интегрирующее звено) и управитель частоты 25 генератора 21 (широкополосный усилитель постоянного тока с возможным объединением с генератором пилообразного напряжения для "грубой" перестройки частоты генератора 21). Выход ЛЧМ-генератора 21 соединен со смесителем 26, на другой вход которого подается колебание гетеродинирования от высокостабильного высокочастотного генератора ГСИ 20. Смеситель 26 используется для переноса спектра колебаний ЛЧМ генератора "вниз" по частотному спектру, благодаря чему удается снизить коэффициент диапазона перестройки в ЛЧМ генераторе 21 до приемлемой величины (порядка 1,4) при широкополосной перестройке частоты в пределах ЛЧМ импульса. Например, частота ЛЧМ генератора 21 перестраивается в диапазоне от 1050 до 750 МГц (с полосой спектра 300 МГц и с коэффициентом диапазона перестройки 1050/750=1,4). При выборе частоты гетеродинирования f1=600 МГц и транспонировании частоты ЛЧМ генератора "вниз" получаем на выходе полосового фильтра 27 ЛЧМ колебания в диапазоне от 450 до 150 МГц (с тем же спектром 300 МГц, но уже с коэффициентом диапазона перестройки 450/150=3). На второй вход фазового детектора 23 поступают опорные колебания от формирователя опорных импульсов 29, который также используется для выработки кодов, управляющих коэффициентом деления частоты генератора 21 в делителе 22 (ДПКД). Смысл этого ДПКД состоит в том, что в нем текущее значение частоты, изменяющееся во времени (в течение времени τи), делится так, что результат деления - частота, равная частоте опорных импульсов формирователя 29, а всякие отклонения от этого условия, выявляемые при импульсно-фазовом детектировании, создают сигнал ошибки, который через фильтр нижних частот 24 воздействует на управитель частоты 25, соответствующим образом корректируя в нужную сторону и на нужную величину частоту колебаний генератора 21. Перестройка последнего может "грубо" осуществляться от импульсного пилообразного генератора в составе управителя частоты 25, а точная подстройка частоты осуществляется от действия системы автоматического регулирования описанного выше типа (статического при фильтре нижних частот или астатического при использовании интегрирующего звена). Устройство задания кодов управления схемой ДПКД 30 осуществляет переключение делителя частоты 22 в нескольких точках диапазона перестройки генератора 21, число которых может определяться как из соображений заданной точности воспроизведения функции df/dt=const(t), так и из соображений сложности устройства переключения.
Коммутатор 10 состоит из несимметричного триггера или ждущего мультивибратора 10.1, определяющего временной порядок переключения собственно коммутирующего элемента 10.2 (p-i-n-диодов), на передачу и прием ЛЧМ сигналов.
ГСИ 20 состоит из высокочастотного генератора опорного сигнала с кварцевой стабилизацией 31 с частотой колебаний f1 (например, 600 МГц), высокочастотного делителя частоты 32 с выходной частотой f2=ΔF (например, 300 МГц, то есть делителя на два) и делителя частоты 33 с коэффициентом деления, обеспечивающим получение опорной частоты зондирующих ЛЧМ импульсов f3=1/Ти, например, частоты 20 кГц (при этом делитель частоты 33 имеет коэффициент деления К2=15000, и содержит последовательно включенные делители на три и на пять и три делителя на десять).
Продолжение подробной блок-схемы УМ дано на рис.7, в которой, кроме уже заявленных элементов 14-16, рассмотрена структура ВС 17. Из схемы фиг.6 в схему на фиг.7 поступает информационный сигнал А с выхода СФ 13, а также синхросигналы В и С соответственно с частотами f3 и f2,. Как указано выше, сформированные на выходе ПУ 16 импульсы-отклики обнаруженных неоднородностей объекта должны быть записаны с сохранением информации о временной задержке каждого из них и их амплитудах. С этой целью ВС 17 включает линейку быстродействующих аналоговых ключей 34 с числом таких ключей N, если предполагается столько рассматривать слоев в объекте, общее число которых может быть существенно больше числа N, например, N=16 при общем числе слоев 128, если толщину каждого слоя принять равной 5 мкм, а толщину объекта - равной 0,64 мм (640 мкм). Временное "окно" скользящего типа при этом может позволить просматривать одновременно 16 смежных слоев в 112 или 8 вариантах смещения 16-слойного "окна" с дискретом перестройки глубины просмотра в один слой. На информационные входы аналоговых ключей линейки 34 сигналы подаются параллельно, однако включенным оказывается только один из ключей - сначала первый, затем второй и т.д. до последнего 16-го ключа. Перебор включения аналоговых ключей линейки 34 осуществляется выходными сигналами дешифратора 40, на вход которого подается в каждом цикле пачка из N импульсов частоты f2=ΔF, а его 16 выходов подключены к управляющим входам аналоговых ключей линейки 34. С аналоговых ключей рассортированные по времени возможного поступления импульсы от неоднородностей объекта поступают на линейку 35 из N аналоговых запоминающих амплитуду сигнала схем, которые сохраняют значение этой амплитуды неизменным в течение некоторого достаточного для обработки времени. Такие элементы - пик-детекторы с ячейками памяти на емкостях нашли широкое применение в быстродействующих схемах электроники. Далее в тракте многоканальной обработки используется линейка 36 из N быстродействующих аналого-цифровых преобразователей (АЦП), например, с 6-ю разрядами в каждом. При этом амплитуда импульса, записанная в аналоговых запоминающих элементах линейки 35, преобразуется в бинарный 6-разрядный код, то есть квантуется по 64 уровням напряжения. Эти коды с АЦП линейки 36 по 16 каналам поступают на линейку 37 из N цифровых накопителей. Число тактов накопления можно изменять, но при этом будет также изменяться и разрядность выходных сигналов цифровых сумматоров линейки 37. Пусть для определенности эти сумматоры работают по четырем циклам, т.е. М=4, что добавляет еще два двоичных разряда в оценке амплитуды регистрируемых сигналов. При этом выходы сумматоров являются байтовыми, т.е. 8-разрядными. Отметим, что это всего лишь пример реализации, но числа N и М могут быть и иными, что скажется лишь на составе оборудования (его сложности) и времени обработки информации. С выходов сумматоров линейки 37 байтовые цифровые сигналы поступают на N-разрядный параллельный регистр сдвига 38, с помощью которого N байтовых сигналов преобразуются в последовательный побайтово код, воздействующий на 8-входовой (в данном примере) цифроаналоговый преобразователь (ЦАП) 39 среднего быстродействия (со спектром образующихся сигналов порядка 6 МГц).
Если частота записи информационных сигналов равна f2=ΔF (в данном примере это 300 МГц), то частота съема информации должна быть существенно снижена для возможной стыковки с быстродействием видеокарты компьютера 18 (6-10 МГц и выше). Поэтому частота опроса сумматоров линейки 37, то есть тактовая частота преобразования параллельного байтового набора в последовательный байтовый поток в регистре 38 выбирается в р раз меньше частоты f2, например, в 50 раз, то есть выбирается равной 6 МГц.
Формирование пачки из N импульсов, управляющих работой дешифратора 40 с частотой f2, обеспечивается схемой из делителя частоты 41 на N, запускаемого по импульсу начала "окна" в момент времени Tнач относительно зондирующего синхроимпульса с длительностью импульса "окна" Ток (см. фиг.8) и закрываемого от импульса переноса делителя, который также поступает на вход RS-триггера 42, на другой вход которого подан импульс "окна". При этом триггер 42 управляет ключевой схемой "И" 43, формирующей пачку из N импульсов частоты f2, которая поступает на вход схемы "И" по входу С. Установка в исходное состояние формирователя пачки осуществляется каждый цикл по входу В.
Формирование пачки из N импульсов, управляющих работой регистра сдвига 38 с частотой f2/p, обеспечивается схемой из двух делителей частоты - первого 44 на р и второго, входящего в состав генератора пачки 45, на N. Импульсы первого из делителей 44 с частотой на выходе f2/p пересчитываются во втором делителе на N, так что образуется интервал времени от первого импульса с выхода первого делителя 44 до его N-го импульса, равный р Ток, в течение которого соответствующая схема "И" в составе генератора пачки 45 передает на управляющий вход регистра сдвига 38 импульсы с частотой f2/p, начиная с момента Тсч подачи на вход генератора пачки 45 и счетчика 44 импульса разрешения считывания информации Uсч, формирование момента появления которого определяется либо работой компьютера 18 (при синхронном режиме), либо на основе собственных электронных схем (асинхронный режим обмена данными с компьютером). При всех случаях момент считывания должен начаться не раньше окончания импульса "окна", то есть после записи возможных сигналов по всем N каналам, а полный процесс считывания должен закончиться до начала М-го импульса зондирования объекта ЛЧМ-УЗ-импульсом (считывание происходит один раз за М циклов зондирования). В исходное состояние генератор 45 приводится опорными импульсами со входа В.
Исходные состояния устанавливаются по входу В и в линейках 35 и 37 ВС 17 - в элементах линейки 35 по каждому опорному импульсу, а в элементах линейки 37 по каждому М-му опорному импульсу (каждому четвертому в данном примере при М=4). В последнем случае (при М=4) импульсный сигнал от входа В делится на четыре, и установление сумматоров линейки 37 осуществляется каждым четвертым импульсом, образующимся на выходе такого делителя (не представленного на схеме). В случае, если М=1, установка сумматоров линейки 37 производится каждым из импульсов от входа В, как это и отражено на схеме фиг.7.
К информационному входу компьютера 18 поступает видеосигнал с ЦАП 39 и синхросигналы управления от генератора пачки 45 и с ГСИ 20, а также с двухкоординатного сканирующего устройства 9 о текущем положении объекта (кружка рассеяния на объекте, положение которого задается координатами Х и Y). С компьютера 18 на ВС 17 поступают сигналы управления скользящим временным "окном" и считыванием информации при синхронном режиме обмена, либо импульс запроса на считывание; передаются на двухкоординатное сканирующее устройство 9 команды, определяющие темп и режим сканирования растра по Х и Y координатам. В компьютере полученная информация обрабатывается по специальной многопрофильной программе и результаты обработки передаются на дисплей, на котором можно увидеть либо послойно, либо объемно то, что скрыто за непрозрачной толщей объекта на его разных глубинах и в его разных участках растра.
Пример такой визуализации неоднородностей объекта дан на фиг.9 при условном разбиении растра на 16×16 зон, хотя на самом деле количество таких зон может быть гораздо больше, например, объект размером исследуемой области 3×3 мм может быть представлен 300×300 зонами размером 10 мкм каждая (по диаметру кружка рассеяния).
В случае задания частоты зондирующих импульсов f3=20 кГц (Ти=50 мкс) при М=4 получаем скорость движения сканера 9 по строке данного растра vcc=dф/МТи=10-5/4*5·10-5=0,05 м/с. Время просмотра одной строки из m=300 элементов по (1ф=10 мкм каждый и при М=4 обзорах каждого элемента равно tcc=mMTи=300*4*5·10-5=6·10-2 с=60 мс. При этом обзор всего растра из n=300 строк займет время tpac=ntcc=300*6·10-2=18 с. Таким образом, приблизительно за 20 секунд можно получить полную информацию о любых 16 смежных слоях из 128 возможных по 90000 зонам поверхности объекта и представить эту информацию на дисплее, а за (128/16)*20=2 мин 40 сек. Можно получить полную информацию о всем объеме объекта размерами 3×3×0,64 мм3, то есть о его 11520000 точках размерами 10×10×5 мкм3, то есть со скоростью обработки 72000 точек/сек или, что то же, со скоростью 72 кбайт/сек.
Следует уточнить работу двухкоординатного сканирующего устройства 9. При выбранной частоте опроса каждой из зон объекта по строке растра, равной 5 кГц, перемещение объекта на основе шагового двигателя едва ли возможно из-за довольно высокой частоты сканирования. Вместо скачкообразного, можно использовать плавное перемещение по строке со скоростью 50 мм/с. При этом каждая зона будет просматриваться как бы с четырех различных ракурсов, что, возможно, даже еще лучше, чем при просмотре с одного и того же ракурса, учитывая накопление информации в ВС 17 с кратностью М. Шаговый принцип перемещения следует при этом использовать при кадровой развертке, при переходе от одной строки к другой, смежной с ней строкой, с частотой, в m раз меньшей частоты 1/mMTи=1/300*4*5·10-5=16,67 Гц. При этом строчная развертка сначала осуществляется слева-направо, а в следующей строке справа-налево и т.д., всякий раз сдвигаясь на один дискрет по кадру шаговым двигателем с безлюфтовой трансмиссией.
Интересным решением обеспечения плавной развертки является спиральная развертка всего рабочего поля объекта - по разворачивающейся, а затем сворачивающейся спирали. Можно предложить также развертку с равномерным движением объекта по окружности постоянного радиуса с одновременным медленным перемещением объекта вдоль одной координаты. Все эти виды разверток легко преобразуются в декартову систему координат, в которой работает развертка дисплея, по соответствующим подпрограммам преобразования координат.
Частота следования зондирующих ЛЧМ-УЗ-импульсов f3=1/Ти выбирается из условий заданной задержки ультразвукового сигнала в акустической структуре УМ Δtзад, величины длительности зондирующего импульса τи, времени обработки сигналов в ДЛЗ с шириной временного "окна" τи+Ток и времени процесса считывания информации в компьютер p/ΔF, то есть величина периода следования Ти с учетом разного рода чисто аппаратурных задержек Δτапп, суммарная величина которых обычно не превосходит порядок 1 мкс, определяется из соотношения Ти≥Δtзад+2τи+(p+1)/ΔF+Δτапп. Подставляя в это соотношение величины, рассмотренные в приведенном примере реализации УМ, получим сумму всех задержек в акустическом и электронном трактах УМ, равную 13,3+4+51/300+1=18,53 мкс. Из этого следует, что взятый в рассмотренном примере период следования зондирующих импульсов в 50 мкс является избыточным, и можно его снизить до величины 20 мкс, имея частоту f3=50 кГц, что позволит сократить время формирования заданного растра от объекта с 18 до 7,2 сек, а пропускную способность канала обработки данных увеличить с 72 кВ/сек до 180 килобайт/сек (для сравнения отметим, что запись на CD-RW компакт-диска происходит со скоростью порядка 1,8 МВ/с, то есть на порядок выше, так что в случае работы УМ далеко не исчерпываются потенциальные резервы компьютера по его быстродействию).
Заявляемое техническое решение может иметь различные модификации в части организации сканирования объекта, разработки программного продукта, повышения линеаризации частотно-временной перестройки в генераторе ЛЧМ-сигнала, оптимизации акустооптической структуры, приспособления к различным исходным задачам и т.д., однако при этом главные принципы обеспечения высокой разрешающей способности УМ, работающего в режиме "на отражение", сохраняются неизменными. Эти принципы составляют сущность самого способа достижения такого результата, основанного на отражении УЗ-колебаний от неоднородностей объекта, находящегося в фокальной плоскости акустического объектива и перемещающегося в ней сканирующим устройством, который отличается тем, что объект облучают импульсными широкополосными УЗ-колебаниями, например, ЛЧМ-колебаниями, спектр которых выбирают из условия заданного разрешения УМ по глубине, а отраженные от неоднородностей объекта импульсные УЗ-колебания сжимают по времени в оптимальном фильтре, для чего в нем используют, например, согласованную с ЛЧМ-колебаниями дисперсионную линию задержки.
Указание на использование широкополосных импульсных УЗ-колебаний для зондирования объекта предполагает применение не только ЛЧМ-сигналов, а и вообще любых других видов широкополосных сигналов - синус-ЧМ, фазоманипулированных последовательностей, модуляция в которых осуществляется по псевдослучайному коду [12, 13] (это так называемые М-последовательности) и другие. При этом оптимальный фильтр должен выполняться согласованным с применяемым видом ЧМ- или ФМ-сигнала [14], притом не обязательно на основе ДЛЗ (может быть использована соответствующая компьютерная обработка, адекватная действию ДЛЗ, или быстродействующий спецпроцессор).
Заявляемое техническое решение может быть использовано при экспресс-анализе структуры многослойных непрозрачных тонких и малоразмерных физических объектов, например, многослойных БИС и ЧИП-микросхем современной электроники на этапе их изготовления. Высокая разрешающая способность по глубине позволяет исследовать тонкую структуру различных многослойных объектов, видеть их внутренность послойно и в объемной реконструкции. Заявляемое устройство может найти практическое применение в медицинской (биологической) практике, в различных физических экспериментах и в технологических процессах, в криминалистике и других областях деятельности.
Опытный макетный образец заявляемого технического решения может быть изготовлен и испытан на предприятиях, связанных с разработкой оптических, акустических и электронных приборов, например, во ФГУП ВНЦ "ГОИ им.С.И.Вавилова", в Физико-техническом институте им.А.Ф.Иоффе (Санкт-Петербург), в ФИАН, в МФТИ им.Баумана (Москва) и других организациях страны. Ориентировочный срок разработки с изготовлением опытного макетного образца - один год при условии комплексной коллективной проработки отдельных технических вопросов и широкой кооперации в использовании элементной базы, примененной в УМ. Так, акустооптический элемент УМ может быть изготовлен силами ФГУП ВНЦ "ГОИ им.С.И.Вавилова", соответствующая ДЛЗ может быть изготовлена по заказу во ВНИИСИМС (г.Александров, Владимирская обл.), электронное оборудование УМ может быть разработано и изготовлено по заказу на предприятии МРП. Общее руководство разработкой целесообразно поручить ФГУП ВНЦ "ГОИ им.С.И.Вавилова" (Санкт-Петербург), имеющего определенный практический опыт построения систем обработки информации на основе ДЛЗ.
Литература
1. Фильтры на поверхностных акустических волнах, под ред. Г.Мэттьюза, М., Сов. радио, 1981, 472 с.
2. Орлов B.C., Бондаренко B.C., Фильтры на ПАВ, М., Сов. радио, 1984, 450 с.
3. Тверской В.И., Дисперсионно-временные методы измерения спектров радиосигналов, М., Сов. радио, 1974, 240 с.
4. Речицкий В.И., Акустоэлектронные радиокомпоненты, М., Сов. радио, 1980, 264 с.
5. Джек А.А., Грант П.М., Коллинз Дж.Х., Теория проектирования и применения Фурье-процессоров на поверхностных акустических волнах, ТИИЭР, 1980, т.68, №4, с.22-43.
6. Каринский С.С., Устройства обработки сигналов на поверхностных акустических волнах, М., Сов. радио, 1975, 176 с.
7. Меньших О.Ф., Хайтун Ф.И., Адаптивный лазерный доплеровский локатор, Авт. свид. СССР №2012013.
8. Меньших О.Ф., Согласованный фильтр, Патент РФ №2016494.
9. Меньших О.Ф., Устройство для анализа спектра сигнала, Патент РФ №2040798.
10. Меньших О.Ф., Обнаружитель моноимпульсного сигнала. Патент РФ №2046370.
11. Меньших О.Ф., Способ спектрального анализа, Авт. свид. СССР №2071066.
12. Гилл А., Линейные последовательностные машины. Анализ, синтез и применение, пер. с англ. Бернштейна А.С., под ред. Цыпкина Я.З., М.: Наука, 1974, 287 с.
13. Свердлик М.Б., Оптимальные дискретные сигналы, Сов. радио, М., 1975, 200 с.
14. Тихонов В.И., Оптимальный прием сигналов. Радио и связь, М., 1983, 320 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2011 |
|
RU2451291C1 |
| СПОСОБ ПРОЧТЕНИЯ ЗАКРЫТЫХ ДОКУМЕНТОВ | 2011 |
|
RU2451290C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ИНТРОСКОПИИ | 2008 |
|
RU2359265C1 |
| ИМИТАТОР БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ МОРСКОЙ ПОВЕРХНОСТЬЮ | 2011 |
|
RU2451302C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ ЛАЗЕРНЫМ КОГЕРЕНТНЫМ ЛОКАТОРАМ | 2011 |
|
RU2456536C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| АНАЛИЗАТОР СПЕКТРА СИГНАЛОВ | 2006 |
|
RU2315327C1 |

Изобретение относится к областям электроакустики и радиотехники и может быть использовано в качестве устройства для послойной визуализации неоднородностей внутренних структур непрозрачных объектов. Ультразвуковой микроскоп содержит преобразователь УЗ-колебаний, звукопровод, акустическую линзу и иммерсионную среду, исследуемый объект, дисплей, генератор линейно-частотно-модулированных импульсов, коммутатор, широкополосный усилитель, согласованный фильтр, компенсирующий усилитель, амплитудный детектор, пороговое устройство, временный селектор и компьютер, генератор синхронизирующих импульсов. Компьютер подключен выходом к дисплею. Выходы генератора синхронизирующих импульсов подключены к синхровходам генератора линейно-частотно-модулированных импульсов, коммутатора, временного селектора, двухкоординатного сканирующего устройства и компьютера. Первый управляющий выход компьютера подключен ко второму входу временного селектора. Второй - к управляющему входу двухкоординатного сканирующего устройства. Выход двухкоординатного сканирующего устройства соединен со вторым информационным входом компьютера. Второй вход-выход коммутатора соединен с преобразователем УЗ-колебаний. Технический результат - увеличение разрешающей способности по глубине исследуемого образца в режиме работы ультразвукового микроскопа «на отражение». 9 ил.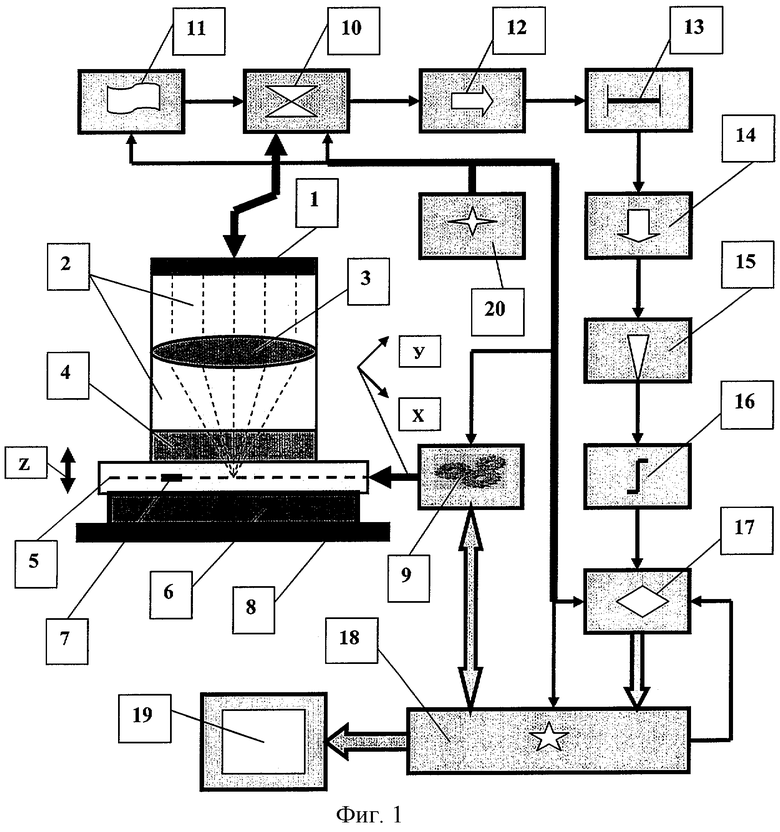
Ультразвуковой микроскоп, содержащий последовательно акустически связанные преобразователь УЗ-колебаний, звукопровод, акустическую линзу и иммерсионную среду, связанную с исследуемым объектом, помещенным в фокальную плоскость акустической линзы и перемещаемым в ней двухкоординатным сканирующим устройством, а также дисплей, развертка в котором соотнесена с работой двухкоординатного сканирующего устройства, отличающийся тем, что в него включены последовательно соединенные генератор линейно-частотно-модулированных импульсов, коммутатор, широкополосный усилитель, согласованный фильтр на дисперсионной линии задержки, компенсирующий усилитель, амплитудный детектор, пороговое устройство, временный селектор и компьютер, подключенный выходом к дисплею, а также генератор синхронизирующих импульсов, выходы которого подключены к синхровходам генератора линейно-частотно-модулированных импульсов, коммутатора, временного селектора, двухкоординатного сканирующего устройства и компьютера, первый управляющий выход компьютера подключен ко второму входу временного селектора, второй - к управляющему входу двухкоординатного сканирующего устройства, выход которого соединен со вторым информационным входом компьютера, а второй вход-выход коммутатора соединен с преобразователем УЗ-колебаний.
| DE 3835886, 26.04.1990 | |||
| КОРРЕКТОР ЭЛЛИПТИЧНОСТИ | 1990 |
|
RU2012951C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| АКУСТИЧЕСКИЙ МИКРОСКОП | 1992 |
|
RU2011194C1 |

