Изобретение относится к контрольно-измерит1ельной технике и предназначено для автоматического снятия противодействующей статической характ - 5 ристики путем регистрации и измерения по ней параметров контактов, в частности начального и конечного нажатия, раствора, провала контактов и общего хода подвижной система элект-10 рических аппаратов.
Известен метод и устройство для определения параметров контактов, содержащее динамометр, указатель перемещения и сигнализирующий блок 1. 13
Такое устройство не позволяет сии- . мать полную статическую противодействующую характеристику подвижной систекы электрического аппарата и повысить точность измерения.2(/
Цель изобретения - возможность автоматического снятия статической противодействующей характеристики путем записи ее на диаграмме регистрирующего прибора и повышение точ- 23 ности измерения параметров контактов.
Это достигается тем, что в устройство введены синхронный электропривод, тензометрический датчик усилий, 30
блок питания и балансировки, измерительный усилит ль постоянного тока, показывающий и регистрирующий прибор, причем тенз ометрический датчик усилий кинематически связан с синхронным электроприводом и имеет возможность .кинематической связи с подвижной системой электрического апрарата, электрический же вход тензЬМетрического датчика усилий подключен к блоку питания и балансировки,-и выход соединен со входом измерительного усилителя постоянного тока, выход которого подключен к показывающему и регистрирующему прибору.
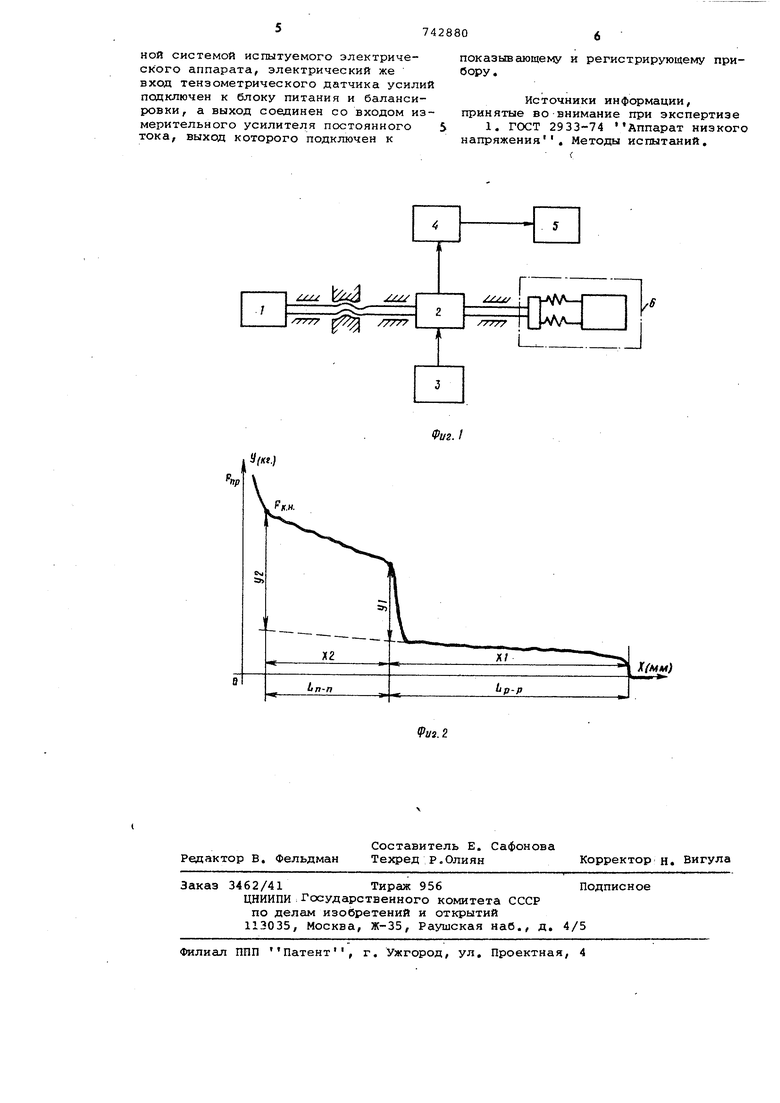
На фиг. 1 приведена структурная схема устройства для снятия статической противодействующей характеристики электрического аппарата; на фиг, 2 - график снятой при помощи этого устройства характеристики электрического аппарата.
Устройство включает, в себя синхронный электропривод 1, тензометрический датчик 2 усилий, блок 3 питания и балансировки, измерительный усилитель 4 постоянного тока, показывающий и регистрирующий прибор 5 и испытуеь«лй аппарат 6.
Работа устройства и снятие статической противодействующей характеристики при помощи него осуществляется следующим образом.
Вращение синхронного электропривода преобразуется в поступательное равномерное перемещение тензометрического датчика 2. Тензометрический датчик 2 при помощи тока перемещает подвижную систему испытуемого аппарата б из начального, разомкнутогр, положения в конечное, замкнутое„
; В процессе йеремещения подвшкнойсистемы испытуемого аппарата из раэ :| мкнутого состояния в замкнутое ст Т1 ческие усилия противодействующих эт ементов паредаются на тензометричфский датчик усилий 2 и с помощью него и блока питания и балансировки 3 преобразуются в постоянное напряжфние.
, Выходное напряжение тензометричфского датчика 2, пропорциональное изменяющимся усилиям, поступает на вход измерительного усилителя 4, усливается им до необходимой величины и1подается для измерения и записи н показывающий и регистрирующий прибор 5.
Благодаря синхронной скорости пеР0мещения тензометрического датчика 2 и подвижной системы испытуемого арпарата 6со скоростью записи на диаграмме регистрирующего прибора 5 снимается полная статическая противЬдействующая характеристика.
Устройство позволяет снимать статНческую противодействующую характеристику в двух режимах - ручном и автоматическом, В ручном режиме усилий в характерных точках измеряюся непосредственно по шкале регистрирующего показывающего прибора 5, в автоматическом - записывается на его диаграмме, В обоих случаях шкалы приборов проградуированы в измеряемых усилиях.
Рассмотрим пример определения параметров контакта по снятию при помощи данного устройства статической противодействующей характеристики одного из аппаратов, FH-H - начальное нажатие; Lp-p- раствор контактов; X - общий ход якоря, РК.Н. - конечное нажатие; 1,п-л- провал контактов;
Начальное нажатие определяют по следующей формуле:
Fn-H.-npYi FK.H. --НеУг ,
(1)
где . NF масштаб по усилию, кг/мм.; У и У„ - соответственные координаты смещения характеристики в точках начального п конечного нажатий,
где П - предел измерения усилия, кг
Н - ширинадиаграммы, мм. Раствор и провал контактов определяются по следующей формуле:
Lfrp MX Xf ; Ln-л --MxXz ,
где MX - масштаб по перемещению в относительных единицах; равный
Vr Si
п.
V2 52 где V - величина скорости перемещения подвижной системы аппарата;
v величина скорости перемещения диаграммы регистрирующего прибора;
величины перемещений под,S2 вижной систеьи аппарата и диаграммы соответственно, мм.
30 Общий ход подвижной системы аппарата определяется как
J -
(3)
В отличии от известного устройства воспроизведение статической противодействующей характеристики на описанном устройстве позволяет наглядно проследить характер воздействия усилий в любой точке перемещения подвижной системы аппарата, увеличить точность измерения параметров контактов и учесть их при проектировании с целью создания более надежных электрических аппаратов.
Формула изобретения
Устройство для снятия статической противодействующей характеристики электрического аппарата, содержащее динамометр, указатель перемещения и сигнализирующий блок, о т л и ч а ющ е е с я тем, что, с целью автоматизации процесса снятия характеристики и повышения точности измерения параметров контактов, в устройство введены синхронный электропривод, Тензометрический датчик усилий, блок питания и балансировки, измерительный усилитель постоянного тока, показывающий и регистрирующий прибор, причем Тензометрический датчик усилий кинематически связан с синхронным электроприводом и имеет возможность кинематической связи с подвижной системой испытуемого электрического аппарата, электрический же вход тензометрического датчика усилий подключен к блоку питания и балансировки, а выход соединен со входом измерительного усилителя постоянного тока, выход которого подключен к
показывающему и регистрирующему прибору.
Источники информации, принятые во-внимание при экспертизе
1. ГОСТ 2933-74 Аппарат низкого напряжения . Методы испытаний.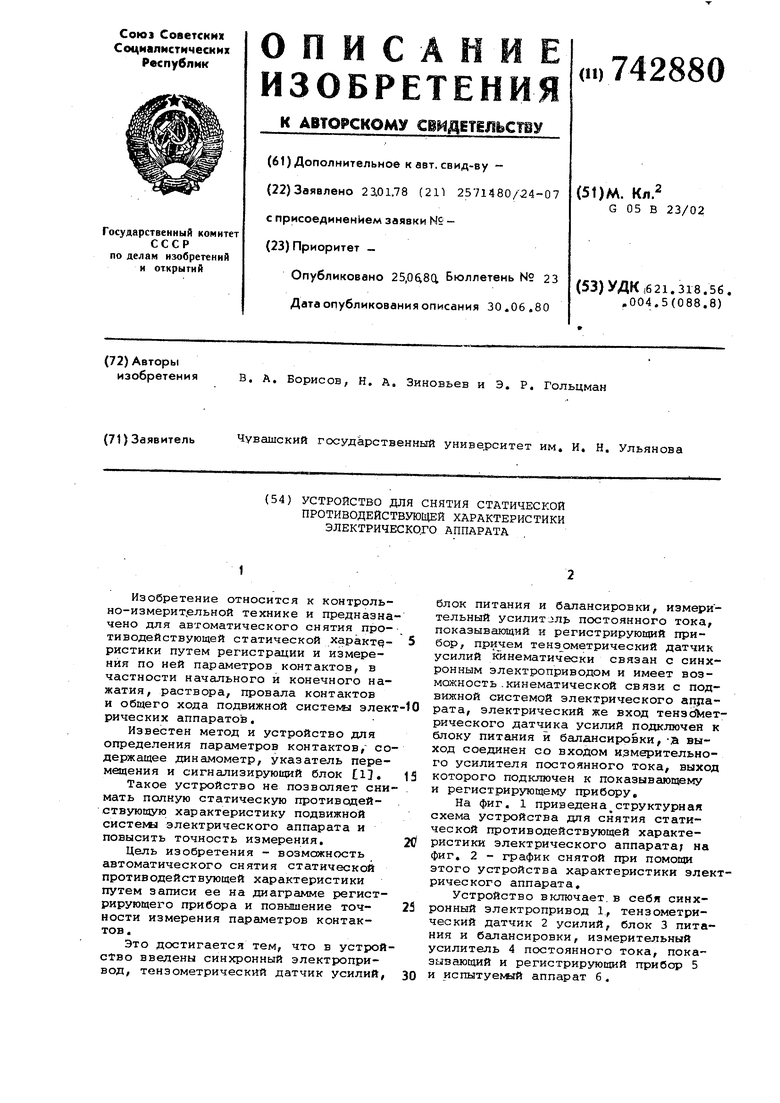
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров электрических контактов электроаппаратов | 1981 |
|
SU966677A1 |
| Устройство для контроля неодновременности коммутации электрических контактов | 1981 |
|
SU951245A1 |
| Устройство для контроля параметровэлЕКТРичЕСКиХ KOHTAKTOB | 1979 |
|
SU838597A1 |
| Устройство для контроля растворов и провалов контактов электрических аппаратов | 1982 |
|
SU1120289A1 |
| Устройство для контроля раствора и провала контактов электромагнитного коммутационного аппарата | 1988 |
|
SU1576924A1 |
| ПЛТЕНТНО-ТЕХНННЕСНА]БИБЛИОТЕКА | 1972 |
|
SU326477A1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ ТКАНЕЙ НА СДВИГ | 1973 |
|
SU382954A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛАСТОМЕРНЫХ ПОГЛОЩАЮЩИХ АППАРАТОВ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2018 |
|
RU2684872C1 |
| Синхронное контактное коммутирующее устройство переменного тока | 1977 |
|
SU729682A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОТПЕЧАТКА, ПОЛУЧЕННОГО НА ПОВЕРХНОСТИ МЕТАЛЛА ПРИ ЕГО ИСПЫТАНИИ НА ТВЕРДОСТЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210755C2 |