1
Известен прибор для испытания тканей на сдвиг, содержащий механизм нагружепия с электроприводом, узел сдвига с зажимами для крепления испытуемого образца, датчик усилия и датчик деформации образца, блок автоматического управления процессом испытания и регистрирующее приспособление.
Целью изобретения является повышение точности исиытаний.
Для этого узел сдвига прибора вынолиеп В виде трех зажимов, крайние из которыхустановлены в направляющих с возможностью перемещепия в горизоиталыюй плоскости и посредством тросиков связаны с грузиками, а направляющие соедипены с механизмом нагружения, причем центральный зажим связан с датчиком усилия.
Механизм нагрул ения прибора может быть выполнен в виде поршня, установленного в направляющих с возможностью перемещения в вертикальной плоскости посредством ролико-виитовой пары связанного с электроприводом.
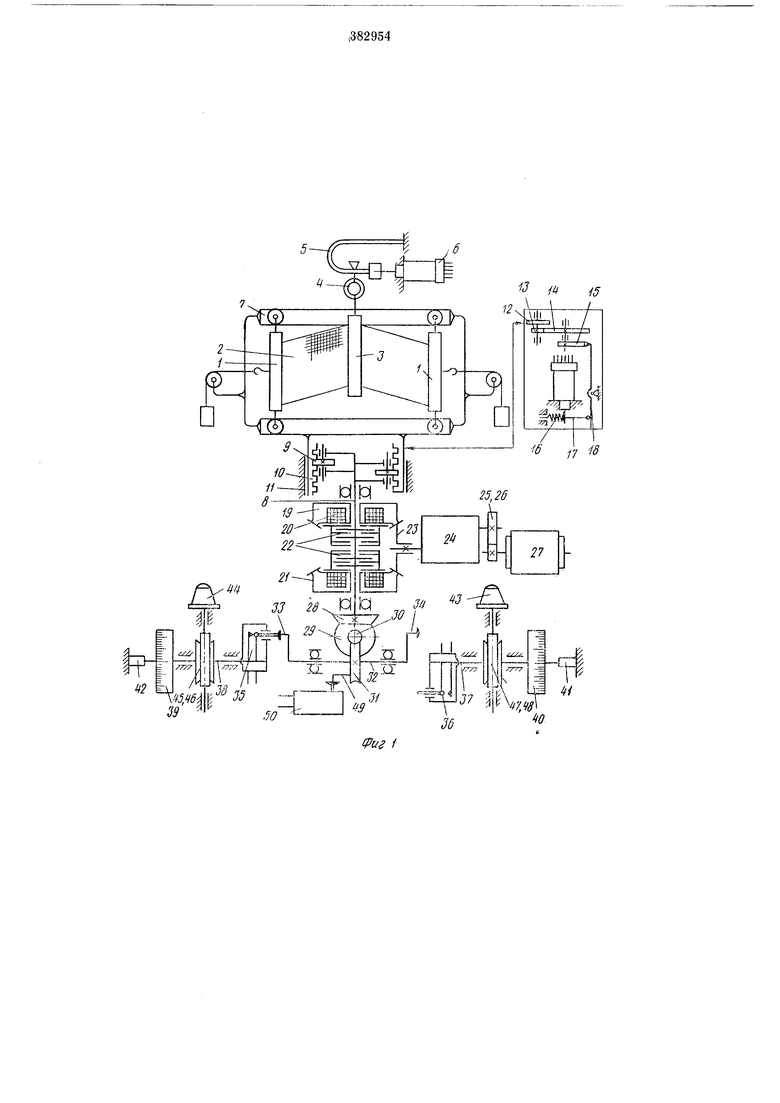
На фиг. 1 изображеиа кинематическая схема предлагаемого прибора; на фиг. 2 - узел сдвига; на фиг. 3 - то же, вид сверху; на фиг. 4 - разрез по А-Л па фиг. 2; на фиг. 5 - принципиальная электрическая схема управления процессами иснытания; на фиг. 6 - схема подключения к самописцу.
Между крайними зажимами 1 узла сдвига закреплен испытуемый образец 2, который через центральный зажим 3 этого же узла и универсальный шарнир 4 подсоединен к датчику усилия. Датчик выполнен в виде фигур ной балочки 5, соединенной со штырем механотропа 6, а с другой стороны через раму 7 - с ролико-винтовой парой, выполненной в виде вала 8, который оканчивается тремя
роликами 9, расположенными по винтовой линии и свободно вращающимися в шарикоподшипниках. Поршень W механизма нагруженпя установлен между направляющими //. Постоянная во времени деформация материалов фиксируется датчиком деформации образца, печувствптельпым к изменению температуры. Фрикционный ролик 12 датчика деформации прижат к поршню 10 пружиной и закреплен па валу вместе с шестерней 13.
Шестерня 13 соединена с шестерней 14, закрепленной на валу в.месте с кулачком 15. На кулачок действует 16, которая через штырь п вывод подвнжных анодов механотропа 17 прижнмает рычаг 18. На валу
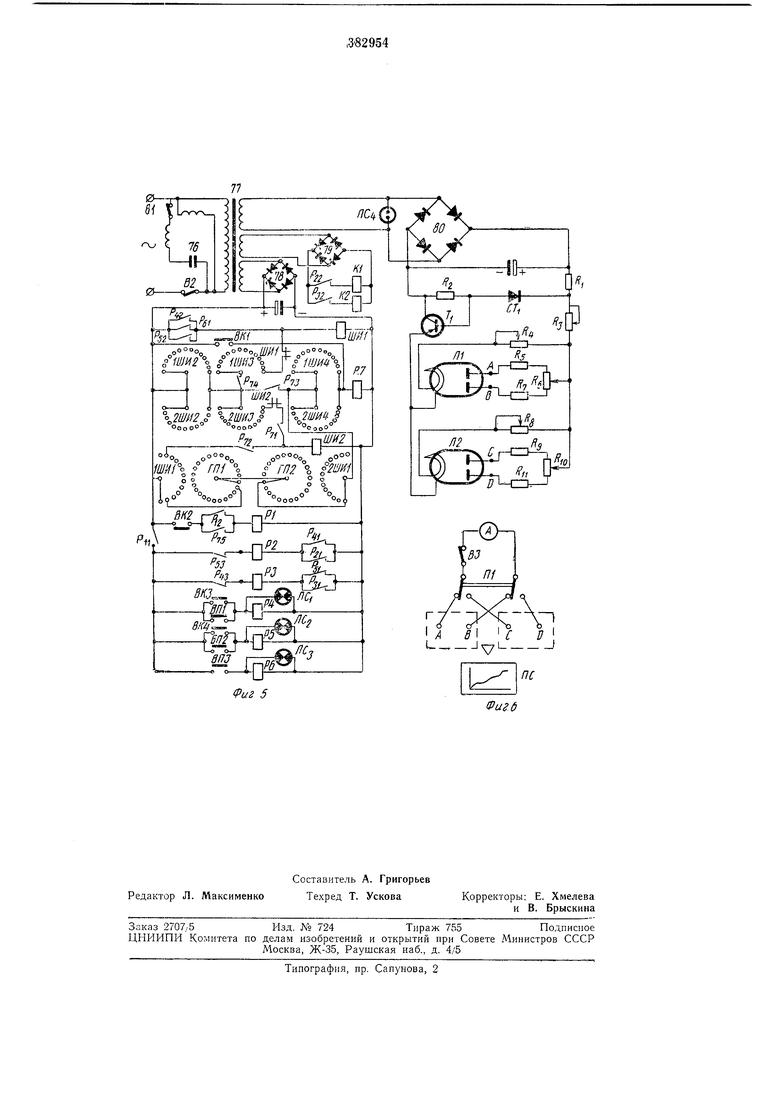
8 свободно сидят электромагнитные муфты, выполнегшые в виде магнитопроводов 19 с расположеннымп в них обмотками 20, оканчивающихся коннческимн шестернями 21, и якоря 22 с расположенными в них фрикционнымн дискамн. Конические шестерни 2} соединеиы с конической шестерней 23, жестко закрепленной на выходном валу коробки скоростей 24, которая через зубчатую иару 25, 26 соединена с синхронным электродвигателем 27, сообщающим движение иоршню W. На конце вала 8 также закренлена коническая щестерня 28, которая через коническую щестерню 29 соединена с механизмом изменения амнлитуды сдвига, выполненном в виде червячной пары 30, 31, червячное колесо 10 которой жестко посажено на валу 32, окапчивающемся фигурными шатунами 33 и 34. Шатуны унравляют контактами микропереключателей 35 и 36, жестко закренленных на валах 37 и 38, которые оканчиваются лим- 15 бами 39 и 40. На лимбах имеются шкалы, показания которых характеризуют уровень деформации и отсчитываются с помощью указателей 4J и 42. Лимбы получают вращение от рукояток 43 и 44 через червячиые пары 20 45-48, червячные колеса которых жестко сидят на валах 37 и 38. От червячного колеса 31 через фигурный палец 49 управляются коитакты центрального неподвижиого микропереключателя 50, определяющего нулевое поло- 25 жение узла сдвига. Рама 7 узла сдвига соединена с поршнем 10 механизма нагружения. Направляющие 5/ и 52 рамы для жесткости скреплены стяжками 53 и 54. На стяжках кренятся направля- 30 ющне ролики 55 и 56, вращающиеся в шарикоподшипниках и служащие для направления троса 57 при пагружении образца начальным натяжением. Груз 58 крепится точно в середипе троса, который перед тем перебрасывается 35 через ролики 59, 60. Нри таком нагружении образец всегда находится симметрично по отношению к оси действия сдвиговой силы. Образец крепится между крайними зажимами, перемещающимися в горизонтальной плоско- 40 сти и выполиепными в виде рамки 61 из двух планок 62 и 63, скрепленных стяжками 64, 65. На стяжках крепятся губки 66 и 67 зажима, между которыми заправляется конец образца. В планках 62 и 63, выполненных в виде 45 полых стержней прямоугольного профиля, подвижно закреплен сухарик 68 и неиодвижно - сухарик 69. В сухарики запрессованы оси 70 и 77, на которые надеты шарикоиодшипники 72 и 73, скользящие по направляю- 50 щим 51 и 52. Нружины 74 прижимают подвижные роликоподшипники к направляющим, выбирают люфт и предотвращают перекос зажимов. Посередине между крайними зажимами образец закрепляется в средний зажим , 55 связаный с датчиком усилия. Стойка 75, на которой крепятся ролики 59, 60 и нанравляющие 51, 52, соединена с порщнем 10 механизма иагружения. Электрическая схема автоматического уи- 60 равления процессом испытания содержит параллельно сети переменного тока подключенный электродвигатель 76, понижающий трансформатор 77, блок счета циклов деформироваиия образца, блок автоматического управ- 65 5 ления направлением движения крайних зажимов, блок датчика усилия сдвига и датчика деформации образца. Блок счета циклов деформирования включает вынрямитель 78, выполненный на четырех диодах, соединенных по мостовой схеме, параллельно подключенный конденсатор для сглаживания пульсаций нанряжений, шаговые искатели (ШЙ): ШИ1, ШИ2 - параллельно включенные обмотки; 1ШИ1, 1ШИ2, 1ШИЗ, 1ШИ4 и 2ШИ1, 2ШИ2, 2ШИЗ, 2ШИ4 - секции контактов первого и второго шаговых искателей; ГП1, ГП2 - галетиые переключатели для установления необходимого числа циклов деформирования образца; Р- - обмотка реле, которое прекращает процесс испытания носле окончания программы; Рц, Pis, 74-замыкающие контакты реле - размыкающийся контакт реле BKi - выключатель кнопочный для прекращения процесса испытания во время заданной программы, Блок автоматического унравления направлением движения крайних зажимов содержит релейное устройство: PI - реле, отключающее блок после окончания программы; Рц и Pi2 - размыкающийся и замыкающийся коитакты реле PI. PZI, PZZ и РЗЬ Рзг - замыкающиеся коитакты реле PZ и PZ, которые управляют работой электромагнитных муфт. Реле PI,, Ра и Рб осуществляют подготовку цепей реле Р2 и РЗ и подачу импульсов в ШИ1 и ШИ2. Р41, Р42, Рбь Р52 и Рб1 являются замыкающимися контактами реле Pi, PS и Ре, а контакты Р43 и Раз - размыкающимися. Лампы ЛСь ЛСг и ЛСз - индикаторные. ВП, ВП и ВПз являются конечными выключателями, ВК2 - кнопочный выключатель для включеиия блока автоматического управления в начале программы испытания. ВКЗ и ВК.4 - выключатели, посредством которых осуществляется изменение направления движения крайних зажимов / узла сдвига. К1 К2 - катущки электромагнитных муфт 20, питающиеся от отдельного мощного выпрямителя 79. В блоке датчика усилия сдвига и датчика деформации образца применен стабилизировапный источник питания на транзисторе Ti и стабилитроне CTL Вход стабилизатора подсоединен к выпрямителю 80, а выход - к чувствительному элементу датчиков - механотроиов. Механотроны выполнены в виде сдвоенных диодов косвенного накала с общими неподвижными катодами и двумя подвижными а.нодами. Сопротивление R3 подрегулирует анодный ток. Катоды диодов накаливаются током, получаемым от того же стабилизированного источника питания. Напряжение накала регулируется сопротивлением R4 и R8. Сопротивления нагрузки JR5, Rl, R9, R11 подключены в каждую цепь анодов для повыщения линейности статической характеристики, а сопротивлениями R6 и R10 выравниваются токи каждого анода. К точкам А, В подключается одна координата самописца
ПС, а к точкам Д, С - другая координата. К этим точкам также через переключатель П1 и выключатель ВЗ подсоединен измерительный прибор для тарировки датчиков.
Испытуемый образец 2 заправляется между губками 66, 67 крайних зажимов / и центрального зажима 5 и натягивается начальным натяжением-подвешиванием через трос 57 груза 55. Деформация сдвига в рамках одного цикла испытания передается следующим образом. Питание в электрическую цепь подается тумблером В2, а тумблером В1 включается электродвигатель 27. Требуемая амплитуда деформации образца на лимбах 39 и 40 устанавливается рукоятками 43 и 44, а требуемое число импульсов - переключателями ГП и ГП2. Нажатием выключателя ВК2 прерывается питание к реле PI, закрывается контакт Яц и подается питание релейному устройству. Нажатием выключателя ВКЗ срабатывает реле Р4 (это показывает сигнальная лампа ЛCi), прерывается цепь реле РЗ через контакт 43, а через контакт Р/л подается питание реле Р2, которое блокируется контактом 21, а через контакг подается питание на обмотку /С/ электромагнитной муфты 20. Также через контакт Р/л подается нервый импульс в шаговый искатель. Вращаюш,ий момент от двигателя 27 через коробку скоростей 24, коническую передачу 23, 21 и якорь 22 с фрикционными дисками передается валу 8, который с помощью роликов 9 перемещает порщень 10 вниз. Крайние зажимы 1 также движутся вниз, и образцу 2 сообщается деформация сдвига. Но достижении заданного уровня деформации фигурный шатун 33 нажимает на микропереключатель 35, и питание подается на обмотку реле Р5, которое, с одной стороны, прекращает работу реле Р2 и выключает электромагнитную муфту К, с другой - подает следующий импульс в шаговый искатель через контакт , а через реле РЗ включает другую электромагнитную муфту К.2 для реверсирования движения порщня 10. Когда образец занимает первоначальное положение, через фигурный палец 49 срабатывает центральнгяй микропереключатель 50, и включается реле Р6, которое подает третий импульс в щаговый искатель. Норшень продолжает движение вверх. Образцу сообщается деформация сдвига в другую сторону до определенного уровня деформации, по достижении которого через фигурный шатун 34 замыкается верхний микропереключатель 36, включается реле Р4, которое, с одной стороны, нодает четвертый импульс в шаговый искатель через контакт , а с другой, - прекращает работу реле РЗ и через реле Р2 подает питание обмотке X/, т. е. реверсирует движение поршня 10. Нри снижении деформации до нуля (образец занимает первоначальное положение) через фигурный палец 49 снова срабатывает микропереключатель 50. Нри этом через контакг Pei подается пятый импульс в шаговый искатель, закрывается
электрическая цепь через 1ШИ, ГП1, ГП2, 2ШИ и получает питание обмотка Р.
Реле Р7 через контакт включает реле PL Оно же блокируется контактом P|2 н через контакт РИ прекращает подачу питания релейиому устройству, тем самым включая электромагнитные муфты 20. Норшень 10 останавлнвается, а шаговые искатели возвращаются в исходное пулевое положение. Таким образом, нроизводптся нолный цикл испытанпя. Во время испытания возникающее в образце усилие сдвига через центральный зажим 3, универсальный шарнир 4 изгибает балочку 5 и смещает стержень механотрона 6, изменяя анодные токи лампы Л}. Разность
потенциала в точках А, В нропорциональна усилию сдвига и записывается самопнсцем ПС в зависимости от постоящюй деформации. Деформация регистрируется в другой координате самонисца через датчик деформации следующим образом. Норщень 10, дпнгаясь вверх или вниз, вращает прижатый к нему ролик 2, который через зубчатую пару 13, 14, в свою очередь, вращает кулачок 15, обеспечивая закон движения рычага 18 с постоянным перемещением, и отклоняет с помощью этого рычага стержень 17 механотрона, изменяя анодные токи лампы Л2. Разность потенциалов в точках С, Д изменяется пропорционально в зависимости от деформации образца. Таким
образом, самописцем ПС записывается усилие сдвига в зависимости от уровня деформирования образца в виде гистерезисных петель.
Нредмет изобретения
40
1.Нрибор для испытания тканей на сдвиг, содержащий механизм нагружения с электроприводом, узел сдвига с зажимами для крепления испытуемого образца, датчик усилия и
датчик деформации образца, схему автоматического управления процессом испытания ц регистрирующее приспособление, отличающийся тем, что, с целью повыщения точности, узел сдвига выполнен в виде трех зажимов,
крайние из которых установлены в нанравляющих с возможностью неремещения в горизонтальной плоскости и посредством тросиков связаны с грузиками, а направляющие соединены с механизмом нагружения, причем центральный зажим связан с датчиком усилия.
2.Нрибор по п. 1, отличающийся тем, что механизм нагружения выполнен в виде поршня, установленного в направляющих с возмол ностью перемешения в вертикальной
плоскости и посредством ролико-винтовой пары связанного с электроприводом, J7 .Г 36 Ifi
70
J4
ФигЗ
A A
69
77
:
,.-
o°°°°°o o°°°- mi
/1ШИ2 § illJl- 3 I „- /ША,
оо о оО О о--9
1
,л X-г.. .- I--с
Zj Г fCCj
2ШИ2.° 2IUH3f 2ШИ
°ОоаоО° ооо. о °° 77

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПОСТРОЧНОГО ФОТОГРАФИРОВАНИЯТЕКСТА | 1970 |
|
SU259626A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ РАЗРЫВНОЙ ПРОЧНОСТИВОЛОКОН | 1971 |
|
SU313063A1 |
| СТЕНДАЛЯ ИСПЫТАНИЯ ВАКУУМНОГО УСИЛИТЕЛЯ | 1970 |
|
SU285298A1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО | 1969 |
|
SU250252A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ КРАСИЛЬНОГО | 1967 |
|
SU190460A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ НА УСТАЛОСТЬ ПРИ КРУГОВОМ ИЗГИБЕ | 2023 |
|
RU2807975C1 |
| НАГРУЖАЮЩИЙ МЕХАНИЗМ | 1965 |
|
SU172524A1 |
| Устройство для распределения рабочей среды | 1976 |
|
SU595544A1 |
| Установка для испытания при повторно-статическом нагружении | 1975 |
|
SU597935A1 |
| Стенд для испытания рулевых механизмов | 1979 |
|
SU851155A1 |