Изобретение относится к области измерительной техники, в частности, к аппаратуре для поверки акселерометров.
Известны устройства для задания и измерения ускорений, использующие ротационные платформы с вертикальной осью вращения (двойные центрифуги), которые снимают статистические, амплитудно-частотные и фазо-частотные характеристики акселерометров 1.
Центрифуга содержит ротор, на котором при помощи втулки с подщипниками и радиального рычага установлен поворотный стол. Привод рабочего ротора содержит двигатель и ременную передачу. Для передачи вращения с рабочего ротора на поворотный стол применена аистема щкивов и ремней.
Недостатками рассмотренных устройств для задания и измерения ускорений являются невозможность снятия фазочастотных характеристик акселерометров с учетом воспроизведения переменной и постоянной составляющих ускорения.
Наиболее близким техническим решением является центрифуга, содержащая ротор, вращающийся на оси, поворотный стол с закрепленным на нем в приспособлении акселерометром. На оси поворотного стола закреплен импульсный датчик угла.
Приспособление вместе с акселерометром может перемещаться по радиусу поворотного стола при помощи направляющих ai микрозинта. На роторе установлены оптическая система с осветителем и зеркало, плоскость которого перпендикулярна прямой, соединяющей оси вращения ротора и поворотного стола и фотоприемник. На поворотном столе также установлено зеркало с
10 плоскостью, параллельной оси чувствительности акселерометра и перпендикулярной радиусу поворотного стола.
Выходы акселерометра и фотоприемника подключены к управляющим входам
15 дополнительного счетчика, к счетному входу которого подсоединен импульсный датчик угла поворота стола 2.
Одним из существенных недостатков описанной установки является повыщенный
20 уровень вибраций, вызываемый дебалансом поворотного стола, и, следовательно, Пизкая точность воспроизведения гармонической составляющей ускорения.
Целью настоящего изобретения является повышение точности воспроизведения переменных ускорений за счет устранения указанных недостатков.
Цель достигается-за счет того, что центрифуга снабжена фильтром высоких частот, амплитудным детектором, .усилителем
мощности и аистемой подвижных грузов, установленных на поворотном столе и приводимых в движение от вспомогательного электродвигателя, причем выход фазового детектора электропривода поворотного стола соединен через фильтр высоких частот и амплитудный дете-ктор с входом усилителя мощности, выход которого подключен к вспомогательному электродш1гателю.
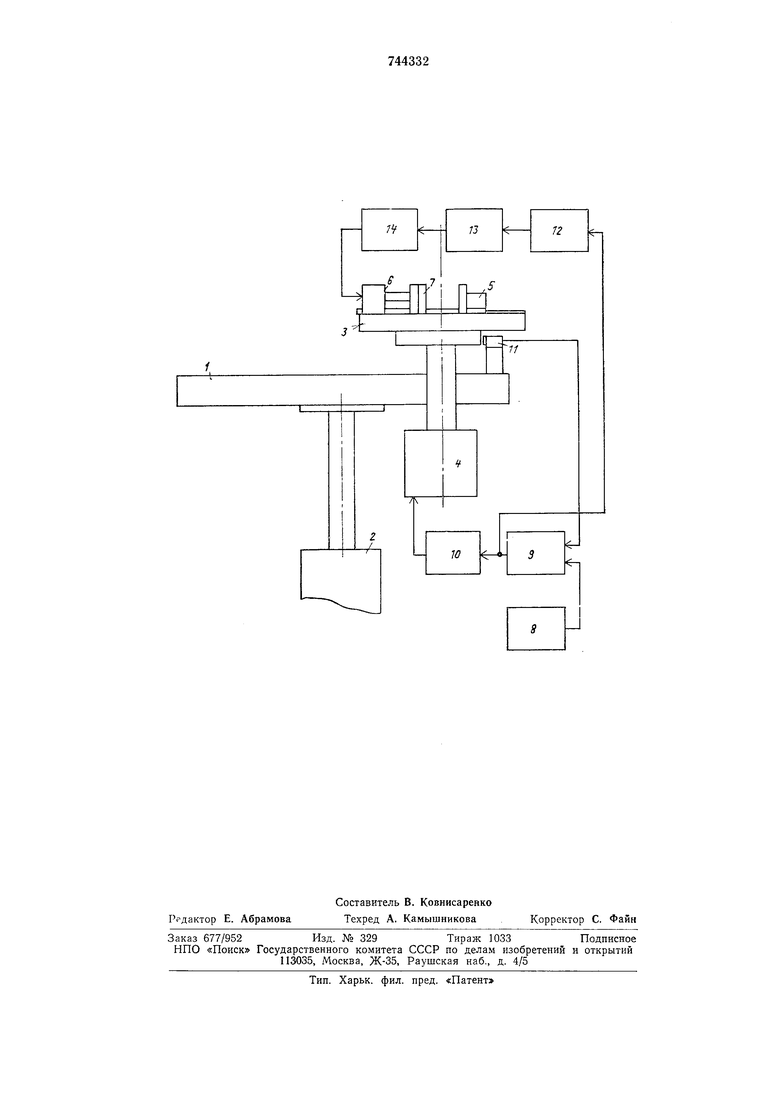
На чертеже показана схема предлагаемой центрифуги.
Центрифуга содержит рабочий ротор /, приводимый во вращепие от электродвигателя 2. На поворотном столе 3, приводилюм по вращение от электродвигателя 4. устанавливается испытуемый акселерометр 5 и вспомогательный электродвигатель 6 с системой подвижных грузов 7.
Электродвигатель 4 поворотного стола управляется системной фазовой автоподстройкп частот, состоящей из задающего генератора (ЗГ) 8, фазового детектора (ФД) 9, (усилителя мощности (У1) 10. Первый вход ФД 9 связан с входам ЗГ 8. ггорой вход - с выходом импульсного датчика скорости (ИДГ) //. Выход ФД 9 соединен с входом фильтра высоких частот ФВЧ 12 и через У1 10 - с двигателем 4 поворотного стола 3. Выход ФВЧ 12 подключен на вхюд амплитудного детектора (АуЦ) 13, выходной сигнал которого через усилитель мощности (У2) 14 подается на вспомогательный двигатель 6.
Р|егулирование скорости электродвига еля 2 рабочего ротора / осуществляется системой фазовой автоподстройки частоты, аналогичной системе привода поворотного стола.
Устройство работает следующим образом.
Значение скорости поворотного стола 3 : адается генератором 8, имеющим кварце1ППО cтaбилизaпJИЮ частот. Этот сигнал подается иа пел)вый вход ФД 9, на второй пход подается сигнал с выхода ИДС //.
При включении привода новоротного тола первоначально наблюдается режим биений, а после выравнивания частот на г.ходах ФД устанавливается режим сингфопного вращ ния, при котором скорость врап1.еиия двигателя 4 поворот Ого сто.па будет точно соответствовать I астоте ЗГ 8, и на выходе ФД 9 установится постоянная разность фаз, по которой Нормируется сигнал управления для двигателя 4.
При идеальной балансировке поворотгый стол вращается равномерно и наблюдается постоянство фазового сдвига сравниваемых на входах ФД двух частотных сигналов. Постоянный выходной сигнал фазового детектора 9, поступающий на вхор ФВЧ 12, не проходит на АД 13, У2 14, и вспомогательный двигатель 6 остается неподвижен. Система подвижных грузов
7 своего положения относительно поворотного стола не меняет.
Неравномерность вращения поворотного стола, вызванная силами дебаланса, приводит к появлению переменной составляющей напряжения на выходе ФД 9. Причем амплитуда колебаний будет достигать максимальных значений в области высоких значений амплитуд воспроизводимых ускорений (при сормакс.), так как F. M/(UIнри этом будет ма.ксимальной. Частота колебаний скорости будет равна частоте вращения поворотного стола.
Переменная составляющая выходного
напряжения ФД 9, проходя через ФВЧ 12 и через АД 13, преобразуется в постоянный сигнал, пропорпиональный амплитуде колебаний напряжения ФД 9.
Напряжение на выходе АД 13 усиливается в У2 14 и подается на двигатель 6, который на1 1пает перемотать грузы 7 в паппавлснии умепьп1ения амплитуды колебаний, т. е. приводит к снижению величины дебаланса поворотного стола, которого при этом стабилизируется. Сигнал на выходе ФД 9 становится постоянным, сигнал на выходе АД 13 станет равным нулю, и вспомогательный двигатель 6 останавливается. Следовательно, при возникновении любого дебаланса, независимо от его причин, система (Контроля за неременной составляющей сигнала ФД обеспеt:HT автоматическое его устранение.
Фор лт } л а :Ч 3 о б р е т 2 н и я
I. Центрифуга, содержащая ротор и поворотный стол, спабженные отдельными электроприводами с контуром управления,
включающем датчик скорости, задающий генератор, фазовый детектор и усилитель мощности, выход которого соединен с электропрпводом, отличающаяся тем, что с пелью повышения точности воспроизведеПИЯ переменных уекорений, на поворотном столе в радиальном направлении установлена направляющая с размещенным на ней подвижным грузом, кинематически соед1П1енным с дополнительным электроприводом.
2. Центрифуга по п. 1, отличающаяся тем, что в нее дополнительно введены последовательно соединенные фильтр высоких частот, амплитудный детектор и усилитель мощности, иричем, выход фазового детектора электропривода поворотного стола соединен со входом фильтра высоких частот, а выход усилителя - со входом доиолнительного электропривода.
Источнягки информации, принятые во
внимание при экспертизе:
1.Авторское свидетельство СССР 114973, кл. G 01 Р 21/00, 1958.
2.Авторское свидетельство СССР № 355970, кл. G 01 Р 21/00, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ПУЛЬСИРУЮЩЕГО ДВИЖЕНИЯ | 2015 |
|
RU2587545C1 |
| Способ поддержания резонансных колебаний механической системы и устройство для его осуществления | 1989 |
|
SU1726055A1 |
| Центрифуга для поверки акселерометров | 1975 |
|
SU547698A2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| Цифровой синтезатор частот с частотной модуляцией | 1989 |
|
SU1707765A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2146806C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| Вибратор с резонансной настройкой | 2022 |
|
RU2816833C1 |
| РАДИОИЗМЕРИТЕЛЬНАЯ УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2015 |
|
RU2584260C1 |