Техническое решение относится к радиолокационным устройствам и может быть использовано для распознавания воздушных целей с помощью радиолокатора, применяющего многочастотный зондирующий сигнал.
Известно устройство распознавания воздушных целей двухчастотным способом [1] , содержащее 1-й и 2-й передатчики, 1-ю и 2-ю передающие антенны, 1-й и 2-й логарифмические приемники, 1-ю и 2-ю приемные антенны, блок вычисления разности частот, пороговое устройство, блок схем совпадения, блок этанолов и индикатор. При этом выход 1-го передатчика соединен с входом 1-й передающей антенны, выход 2-го передатчика соединен с входом 2-й передающей антенны, выход 1-й приемной антенны подключен к входу 1-го логарифмического приемника, выход 2-й приемной антенны подключен к входу 2-го логарифмического приемника, выход которого соединен с 2-м входом блока вычисления разности частот, 1-й вход которого соединен с выходом 1-го логарифмического приемника, а выход - с 1-м входом блока схем совпадения, 2-й вход которого соединен с выходом блока эталонов, а N выходов подключены к соответствующим из N входов индикатора.
Данное устройство позволяет определять поперечные размеры целей и распознавать их по различию амплитуд двух сигналов, отраженных на разных частотах. Достоинством данного устройства является высокое быстродействие.
Однако вероятность правильного распознавания целей данным устройством будет невелика, так как поперечные размеры целей зависят от ракурса локации, что не учитывается при ведении распознавания. Кроме того, данное устройство требует наличия четырех антенн, двух приемников и двух передатчиков, что повышает его дороговизну и громоздкость, а также ведет к затруднениям при технической реализации, так как возникает необходимость обеспечения абсолютной идентичности двух каналов.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство распознавания воздушных целей двухчастотным способом [2] , содержащее задающий генератор (ЗГ), 1-й и 2-й смесители, 1-й и 2-й гетеродины, коммутатор, импульсный модулятор (ИМ), усилитель мощности (УМ), антенну, антенный переключатель (АП), усилитель высокой частоты (УВЧ), 3-й и 4-й смесители, 1-й и 2-й усилители промежуточной частоты (УПЧ), линию задержки (ЛЗ), блок сложения сигналов, 1-й и 2-й амплитудные детекторы (АД), 1-й и 2-й квадраторы, 1-й и 2-й блоки измерения наибольшей амплитуды сигналов (БИНАС), 1-й 2-й интеграторы, делитель частоты, делитель и блок идентификации (БИ). При этом ЗГ соединен своим выходом с 1-м входом 1-го смесителя и 1-м входом 2-го смесителя, 2-й вход которого подключен к выходу 2-го гетеродина, выход 2-го гетеродина так же подключен к 2-му входу 3-го смесителя. Выход 1-го гетеродина соединен с 2-м входом 4-го смесителя и с 2-м входом 1-го смесителя, выход которого подключен к 1-му входу коммутатора, 2-й вход которого соединен с выходом 2-го смесителя, а выход - с 1-м входом УМ, 2-й вход которого соединен с выходом ИМ и входом делителя частоты, а выход - с входом АП, вход-выход которого связан с вход-выходом антенны, а выход - с входом УВЧ. При этом имеют последовательное включение УВЧ, 3-й смеситель, 1-й УПЧ, блок сложения сигналов, 1-й АД, 1-й квадратор, 1-й БИНАС и 1-й интегратор. Последовательно соединены в устройстве распознавания 4-й смеситель, 2-й УПЧ, 2-й АД, 2-й квадратор, 2-й БИНАС и 2-й интегратор. Выход УПЧ соединен также с выходом ЛЗ, выход которой подключен к 2-му входу блока сложения сигналов. Выход УВЧ соединен также с 1-м входом 4-го смесителя, а выход делителя частоты соединен с 2-м входом 2-го интегратора и 2-м входом 1-го интегратора, выход которого подключен к 1-му входу делителя, 2-й вход которого соединен с выходом 2-го интегратора, а выход - с входом БИ.
В прототипе распознавание типа радиолокационной цели производится путем сравнения отношения средних амплитуд отраженных сигналов, измеряемых на выходах двухканального приемного устройства, с порогом, а уже по величине этого отношения применяется решение о типе наблюдаемой цели в пределах класса. Для осуществления такой обработки необходимо иметь определенную величину разноса частот двухчастотного сигнала, позволяющую производить распознавание целей в пределах классов, причем величина разноса частот подбирается оптимальной для средних радиальных размеров реальных целей. Таким образом, использование перепада средних амплитуд на выходе первого и второго интеграторов в качестве признака распознавания воздушных целей позволяет по результатам его анализа классифицировать цели по их протяженности.
Однако прототип имеет ряд недостатков:
во-первых, устройство обработки отраженного сигнала двухканальное, причем необходимо обеспечивать строгую калибровку, достаточно высокую стабильность и идентичность амплитудно-частотных характеристик каждого канала обработки в отдельности и совместно;
во-вторых, необходимость получения большой задержки сигнала на время, равное периоду следования импульсов с обеспечением достаточно высокой точности задержки (до периода колебаний сигнала промежуточной частоты), потребует конструктивно достаточно сложного построения линии задержки (прецизионную систему температурной стабилизации, точные входные и выходные усилители), которые должны исключать влияние изменений температуры на время задержки сигнала;
в третьих, снижается помехозащищенность РЛС, при предлагаемой в прототипе схеме построения приемного тракта радиолокационной станции исключена возможность вобуляции частот повторения импульсов, что снижает надежность помехозащиты РЛС, или обеспечение работы РЛС с различными частотами повторения импульсов, потребует установки дополнительных высокостабильных линий задержки с соответствующими схемами коммутации, согласования и обеспечения из работы;
в четвертых, исключена возможность перестройки несущих частот, что снижает надежность помехозащиты РЛС при применении прицельных активных помех (ПАП), кроме того перестройка несущих частот (при фиксированном разносе частот) позволила бы сократить время идентификации целей за счет сокращения временных затрат на получение среднего значения признака распознавания.
Предлагаемое техническое решение позволит решить задачу сокращения времени и повышения достоверности распознавания воздушных целей, улучшения помехозащищенности РЛС и упрощения конструктивной реализации устройства распознавания воздушных целей двухчастотным способом.
Для решения данной задачи авторы предлагают в известное устройство распознавания воздушных целей двухчастотным способом [2], содержащее: ЗГ, 1-й и 2-й смесители, 1-й и 2-й гетеродины, коммутатор, ИМ, УМ, антенну, АП, УВЧ, 3-й и 4-й смесители, 1-й и 2-й УПЧ, ЛЗ, блок сложения сигналов, 1-й и 2-й АД, 1-й и 2-й квадраторы, 1-й и 2-й БИНАС, делитель частоты, делитель и БИ, дополнительно ввести блок гетеродинов (БГ), фазовращатель (ФВ), два фазовых детектора (ФД), два аналого-цифровых преобразователя (АЦП), вычислительное устройство (ВУ) и устройство отображения (УО).
На фиг. 1 представлена структурная схема предлагаемого устройства распознавания воздушных целей двухчастотным способом.
Устройство содержит ЗГ 1, 1-й смеситель 2, БГ 3, ИМ 4, антенну 5, 1-й АЦП 6, 1-й ФД 7, УМ 8, АП 9, ВУ 10, ФВ 11, УПЧ 12, 2-й смеситель 13, УВЧ 14, 2-й АЦП 15, 2-й ФД 16, УО 17. При этом выход ЗГ 1 соединяют с 1-м входом 1-го смесителя 2, с 2-м входом 1-го ФД 7, а так же - с входом ФВ 11, выход которого соединяют с 2-м входом 2-го ФД 16, 2-й вход 1-го смесителя 2 соединяют с выходом БГ 3, выход БГ 3 так же соединяют с 2-м входом 2-го смесителя 13, выход 1-го смесителя 2 соединяют с 1-м входом УМ 8, 2-й вход которого соединяют с выходом ИМ 4, выход УМ 8 соединяют с входом АП 9, вход-выход которого связывают с вход-выходом антенны 5, а выход - с выходом УВЧ 14, выход которого соединяют с 1-м входом 2-го смесителя 13, выход 2-го смесителя 13 соединяют с входом УПЧ 12, выход которого соединяют с 1-м входом 1-го ФД 7 и с 1-м входом 2-го ФД 16, выход 1-го ФД 7 соединяют с входом 1-го АЦП 6, а выход 2-го ФД 16 соединяют с входом 2-го АЦП 15, выход 1-го АЦП 6 и выход 2-го АЦП 15 соединяют с входами ВУ 10, а выход ВУ 10 - с входом УО 17.
Устройство распознавания работает следующим образом.
ЗГ 1 генерирует непрерывные колебания с частотой fпр, которые подаются на первый вход 1-го смесителя 2. На второй вход 1-го смесителя 2 поступает сигнал на частоте fгетn с выхода БГ, n=1...N, где N - число формируемых частот. Частота сигнала с выхода БГ изменяется от импульса к импульсу таким образом, что разнос частот Δf =fгетn-fгет n-1 остается постоянным и составляет величину порядка единиц МГц. Сигнал на высокой частоте fn=fпр+Fгетn с выхода 1-го смесителя 2 поступает на 1-й вход УМ 8, на 2-й вход которого поступает сигнал с выхода ИМ 4. Сигналы с выхода УМ 8 в моменты наличия на 2-м входе УМ 8 модулирующих импульсов (с выхода ИМ 4) усиливаются по мощности, после чего через АП 9 подаются на антенну 5 и излучаются ею в направлении воздушной цели.
Отраженные целью сигналы принимаются антенной 5 и через АП 9 поступают на вход УВЧ 14, полоса пропускания которого позволяет проводить обработку сигналов N частот зондирования. С выхода УВЧ 14 сигналы поступают на 1-й вход 2-го смесителя 13. На 2-й вход 2-го смесителя 13 поступает сигнал с выхода БГ 3. На выходе 2-го смесителя 13 формируется сигнал на частоте, равной разности частот сигналов, поступивших на 1-й и 2-й входы 2-го смесителя. Выходной сигнал 2-го смесителя 13 поступает на вход УПЧ 12. Усиленный в УПЧ 12 сигнал поступает на 1-е входы ФД 7 и 16, с выходов которых сигнал поступает на соответствующие входы АЦП 6 и 15, а с их выходов поступает на соответствующие входы ВУ 10, с выхода которого - на УО 17. Значение амплитуд рассеянного сигнала на выходах ФД будут находиться в квадратуре в виду того, что подаваемые на их входы опорные сигналы, формируемые ЗГ 1, будут иметь постоянное смещение фаз 90 градусов. Это смещение фаз создает ФВ 11, включенный в цепь опорного сигнала 2-го ФД 16. Амплитуды сигналов на выходах ФД 7 и 16 будут определяться величиной ЭПР отдельных отражателей и фазовыми различиями сигналов рассеянных каждым отражателем, аналитически это может быть описано следующим образом:
где K - коэффициент передачи фазового детектора; fn и fn+1 - значения несущих частот зондирующих сигналов; L - радиальный размер цели (расстояние между крайними БТ вдоль линии визирования РЛС); σi - ЭПР i-й блестящей точки; c - скорость распространения электромагнитных колебаний; Δri - расстояние вдоль линии визирования РЛС между ближайшей к РЛС и i-й БТ; ν - относительное (безразмерное) смещение кажущегося центра цели относительно ее геометрического центра [2].
Выражения (1) и (2) описывают амплитуду сигнала на выходах ФД при обработке сигнала рассеянного РЛЦ на несущей частоте fn, а (3) и (4) соответственно на несущей частоте fn+1. После преобразования сигналов одной частоты с выходов ФД в цифровую форму, выполнения операции вычисления модуля (5)
и возведения его в квадрат (квадратурная обработка) получим значение сигнала, которое с точностью до постоянного множителя совпадает с мгновенной ЭПР наблюдаемой цели [3] (6)
(6)
Среднее значение ЗПР цели при этом будет определяться следующим выражением [3]:
Однако, если при проведении квадратурной обработки взять сумму косинусных составляющих на частотах fn и fn+1 и аналогичную сумму синусных составляющих сигналов и провести с полученными суммами квадратурную обработку (8)
получим значение сигнала, пропорциональное величине параметра рассеяния, определяемого с учетом смещения положения кажущегося центра цели следующим выражением [2]:
Среднее значение параметра рассеяния при этом будет определяться следующим выражением [2]:
Среднее значение параметра рассеяния и приема и ЭПР цели получаем путем вычисления суммы отсчетов амплитуд отраженных сигналов в пределах, как минимум, одного лепестка диаграммы обратного рассеяния (ДОР) для различных реализаций цели в процессе изменения ее ракурса, случайных рысканий по курсу, крену, тангажу [2]. В целях сокращения времени распознавания ВЦ предложено дополнительно изменять от одного импульса к другому несущие частоты зондирующих сигналов, оставляя при этом неизменным шаг перестройки, равный разносу частот зондирующих сигналов. Диапазон перестройки частоты в пределах одного лепестка ДОР будет определяться радиальной протяженностью цели и вычисляться по формуле [4]
Δfp = c/L, (11)
где L - радиальный размер цели; c - скорость распространения электромагнитных колебаний.
Для целей с радиальными размерами 2 и 30 м диапазон перестройки зондирующего сигнала должен составлять соответственно 150 и 10 МГц.
Предлагаемое построение схемы устройства наделяет его новыми свойствами, позволяющими более точно определять протяженность радиолокационной цели вдоль линии визирования, то есть измерять радиальный размер цели.
Повышение достоверности распознавания воздушных целей является следствием цифровой обработки квадратурных составляющих отраженных сигналов. Применение цифровой обработки квадратурных составляющих отраженных от воздушной цели сигналов приведет к уменьшению ошибок измерения радиального размера цели. Наибольшее влияние на точность измерения радиального размера ВЦ оказывает нестабильность временных и амплитудных параметров ЛЗ, возникающих в ЛЗ под влиянием внешних дестабилизирующих факторов (рабочая температура, нестабильность питающих напряжений, механические вибрации).
Сокращение времени распознавания и улучшение помехозащищенности РЛС достигается перестройкой несущей частоты зондирующего сигнала. В прототипе время усреднения Ty выбирается из условия обеспечения анализа информации, заключенной в полном лепестке ДОР цели наименьших размеров, которое при максимальных угловых скоростях изменения ракурса, связанных с наличием и уровнем траекторных нестабильностей полета целей, в турбулентных слоях атмосферы составило для сантиметрового диапазона длин волн 0,1 с [2], а при меньших угловых скоростях целей но может возрасти на порядок [4]. Перестройка несущей частоты зондирующего сигнала, применяемая так же для защиты от ПАП, эквивалентная увеличению угловых скоростей изменения ракурса цели, приводит к сокращению временных затрат на распознавание. Так при периоде следования зондирующих импульсов Tn=1 мс, разносе частот Δf = 2,5 МГц, диапазоне перестройки частоты в пределах одного лепестка ДОР Δfp = 50 МГц вемя Ty(Ty = Tn•Δfp/Δf), затрачиваемое на распознавание цели составит 20 мс, что в пять раз меньше чем для прототипа.
Упрощение конструктивной реализации устройства распознавания воздушных целей двухчастотным способом достигнуто за счет одноканальной обработки отраженного сигнала, что обеспечивает высокую стабильность и идентичность амплитудно-частотных характеристик сигналов на выходе устройства обработки.
Конструкция блоков и узлов 1, 2, 4, 5, 8, 9, 12, 13, 14 в заявляемом устройстве по сравнению с прототипом не претерпела никаких изменений. Блок гетеродинов состоит из набора кварцевых гетеродинов (КГ) и коммутатора, предназначенного для подключения КГ, формирующего частоту fгетn, к 2-му входу смесителя. Вычислительное устройство создается, на элементах цифровой вычислительной техники. В качестве вычислительного устройства можно так же использовать специализированный микропроцессор, выполняющий простейшие математические операции [5]. Фазовые детекторы (5, 10) могут быть созданы на известных ключевых элементах автоматики [6]. Применение заявляемого устройства так же, как и прототипа не требует отдельного радиолокатора станции разведки целей, дополнительно вводимые блоки и узды имеют незначительные габариты и минимальное потребление энергии (кроме этого исключены многие энергопотребляющие узлы) поэтому могут быть реализованы без дополнительных источников питания.
Порядок работы предлагаемого устройства следующий: в режиме поиска цели РЛС использует зондирующие сигналы одной несущей частоты, после обнаружения воздушной цели радиолокационная станция переводится в режим идентификации обнаруженной цели, при этом передатчик от одной импульсной посылки к другой формирует сигнал на частоте fn, таким образом, что величина Δf = fn-fn-1 остается постоянной. Отраженный целью сигнал принимается антенной и через антенный коммутатор поступает в приемный канал, работа которого была описана ранее. После преобразования в цифровую форму коды сигнала, соответствующие квадратурным составляющим, поступают на вход вычислительного устройства. В вычислительном устройстве производится квадратурная обработка сигналов одной частоты и двух частот, затем производятся операции вычисления соответственно средней ЭПР и среднего значения параметра рассеяния и приема, результат вычисления которых будет определяться приведенными ранее аналитическими соотношениями (7, 10). По полученным значениям производится вычисление признака распознавания, в качестве которого используется отношение средних значений параметра рассеяния и ЭПР воздушной цели. Решение о классе (типе) воздушной цели принимается в результате сравнения полученного отношения с порогом (пороговое испытание). Пороговое испытание (аналогичное прототипу) производится в вычислительном устройстве путем сравнения признака распознавания с хранящейся в ПЗУ информации о порогах распознавания. После принятия решения о классе (типе) наблюдаемой цели, по одному из известных критериев (например Неймана-Пирсона), информация о распознанной цели с вычислительного устройства выдается на устройство отображения (индикатор РЛС или монитор ЭВМ).
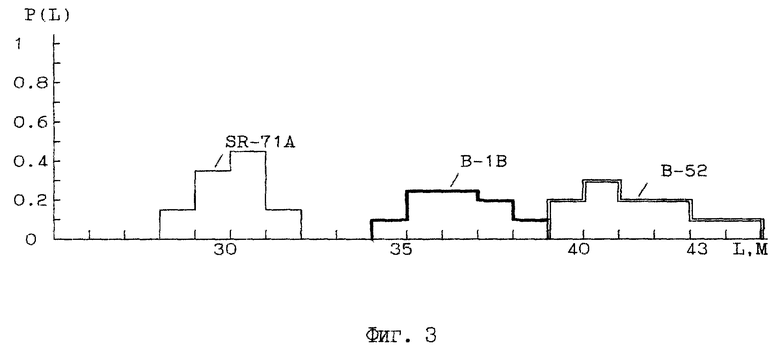
Проверка работоспособности предлагаемого устройства распознавания воздушных целей двухчастотным способом и качества его работы проводилась методом математического моделирования согласно методики, описанной в прототипе. При этом отраженные сигналы целей различных классов (типов) представляли собой суперпозицию отражений от тел простой геометрической формы, которыми аппроксимировались сложные поверхности летательных аппаратов. Для расчета отражательных свойств тел простой формы использовались известные выражения [7, 8 и 9]. Для разыгрывания задачи распознавания были рассчитаны отраженные сигналы следующих целей: "Локаст", BGM-109, AGM-86, "Мираж-2000", F-16A, F-15, SR-71A, B-1B, B-52. Эти сигналы зависели от ракурса локации, дальности до цели, величин угловых скоростей рыскания, тангажа и крена. Статистические данные оценок измерения радиального размера целей по предложенному признаку распознавания набирались для 9 типов целей, находящихся на дальностях от 15 до 60 км, на ракурсах локации по азимуту от 0 до 35o, по углу места - от 10 до 40o при величинах траекторных нестабильностей полета целей, достигающих 2o/с. Длина волны зондирующих сигналов составляла 4 см, разнос частот двухчастотного узкополосного зондирующего сигнала был выбран 2,5 МГц, а диапазон перестройки частоты зондирующего сигнала составил 50 МГц. Для каждого типа цели проделывалось не менее 1000 опытов. Результаты статистического усреднения измеренных предложенным устройством радиальных размеров 9 типов целей представлены в графическом виде (в виде гистограмм) на фиг. 2 и 3. Из анализа данных гистограмм следует, что от цели указанных типов можно распознавать с высокой вероятностью, определив уровни порогов между гистограммами оценок радиальных размеров целей по выбранному ранее критерию.
Как видно, предлагаемое устройство позволяет повысить вероятность правильного распознавания типов воздушных целей, причем прирост вероятности наиболее существенен для целей малых размеров ("Локаст", BGM-109, AGM-86).
Таким образом, заявляемое устройство позволяет улучшить помехозащищенность РЛС, сократить время, повысить достоверность распознавания воздушной цели и упростить конструкцию устройства распознавания воздушной цели двухчастотным способом.
Литература
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984, с. 102, фиг. 3.35 (аналог).
2. Патент РФ N 2114443 (Митрофанов Д.Г., Жигунов П.А., Бондарев Л.А.), 1998, Бюл. N 18, фиг. 2 (прототип).
3. Бондарев Л. А. Отражающие свойства моделей сложных радиолокационных целей. Радиотехника. - 1990, N 7, с. 8-13.
4. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, с. 25.
5. Дроздов Е.А. и др. Многопрограммные цифровые вычислительные машины. - М.: Высшая школа, 1985, с. 243-247.
6. Головинский О.И. Основы автоматики. - М.: Высшая школа, 1987, с. 27.
7. Кобак В.О. Радиолокационные отражатели. - М.: Советское радио, 1975, с. 248.
8. Криспин мл. , Маффетт. Оценка радиолокационного поперечного сечения тел простой формы. ТИИЭР. - 1965, т. 53, N 8, с. 960-975.
9. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей. - М.: Советское радио, 1972, с. 232.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЕЛЕКЦИИ САМОНАВОДЯЩИХСЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1998 |
|
RU2155353C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 2009 |
|
RU2407033C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ РАЗМЕРОВ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ РЛС В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 1999 |
|
RU2150714C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ МЕСТНЫХ ПРЕДМЕТОВ | 2000 |
|
RU2201602C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |

Изобретение относится к радиолокационным устройствам и может использоваться для распознавания воздушных целей с помощью радиолокатора, применяющего многочастотный зондирующий сигнал. Устройство распознавания воздушных целей двухчастотным способом содержит задающий генератор, соединенный с его выходом своим первым входом первый смеситель, импульсный модулятор, соединенный с его выходом своим вторым входом усилитель мощности, антенну и соединенный с ее входом-выходом своим входом-выходом антенный переключатель, усилитель высокой частоты, второй смеситель, усилитель промежуточной частоты, усилитель мощности, антенный переключатель, усилитель высокой частоты, второй смеситель и усилитель промежуточной частоты соединены последовательно, блок гетеродинов, фазовращатель, два фазовых детектора, два аналого-цифровых преобразователя, вычислительное устройство и устройство отображения, выход задающего генератора соединен с вторым входом первого фазового детектора и с входом фазовращателя, выход которого соединен с вторым входом второго фазового детектора, второй вход первого смесителя соединен с выходом блока гетеродинов, выход блока гетеродинов - с вторым входом второго смесителя, выход первого смесителя - с первым входом усилителя мощности, выход усилителя промежуточной частоты - с первыми входами первого и второго фазовых детекторов, выход первого фазового детектора соединен с входом первого аналого-цифрового преобразователя, выход второго фазового детектора - с входом второго аналого-цифрового преобразователя, выходы аналого-цифровых преобразователей соединены с входами вычислительного устройства, выход которого соединен с входом устройства отображения. Технический результат заключается в возможности перестройки несущей частоты зондирующего сигнала и цифровой обработки квадратурных составляющих отраженных сигналов, что приведет к улучшению помехозащищенности РЛС, сокращению времени и повышению достоверности распознавания воздушных целей. 3 ил.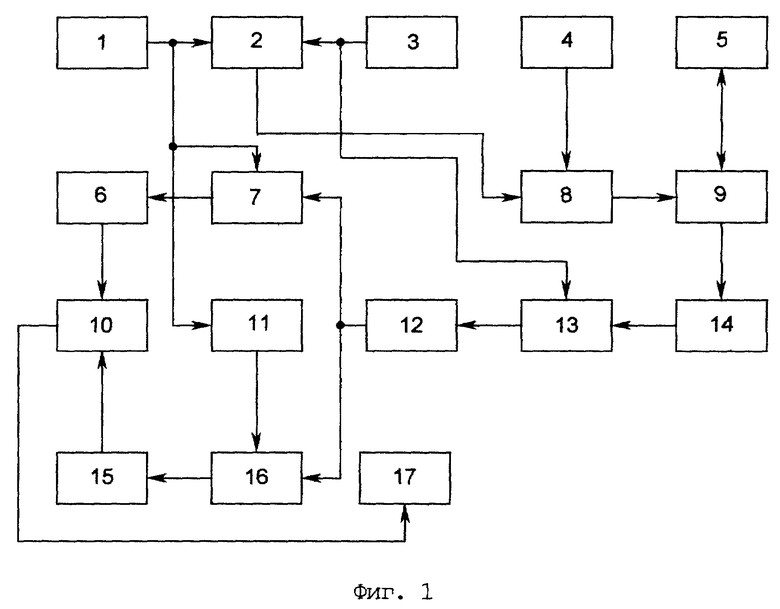
Устройство распознавания воздушных целей двухчастотным способом, содержащее задающий генератор, соединенный с его выходом своим первым входом первый смеситель, импульсный модулятор, соединенный с его выходом своим вторым входом усилителя мощности, антенну и соединенный с ее входом-выходом своим входом-выходом антенный переключатель, усилитель высокой частоты, второй смеситель, усилитель промежуточной частоты, при этом усилитель мощности, антенный переключатель, усилитель высокой частоты, второй смеситель и усилитель промежуточной частоты соединены последовательно, отличающееся тем, что дополнительно введены блок гетеродинов, фазовращатель, два фазовых детектора, два аналого-цифровых преобразователя, вычислительное устройство и устройство отображения, причем выход задающего генератора соединен с вторым входом первого фазового детектора и с входом фазовращателя, выход которого соединен с вторым входом второго фазового детектора, второй вход первого смесителя соединен с выходом блока гетеродинов, выход блока гетеродинов - с вторым входом второго смесителя, выход первого смесителя - с первым входом усилителя мощности, выход усилителя промежуточной частоты - с первыми входами первого и второго фазовых детекторов, выход первого фазового детектора - с входом первого аналого-цифрового преобразователя, выход второго фазового детектора - с входом второго аналого-цифрового преобразователя, выходы первого и второго аналого-цифровых преобразователей соединены с входами вычислительного устройства, а выход вычислительного устройства - с входом устройства отображения.
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083993C1 |
| US 3725917 A, 03.04.73 | |||
| US 4647931 A, 03.03.87 | |||
| Набабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.102, фиг.3.35. | |||
