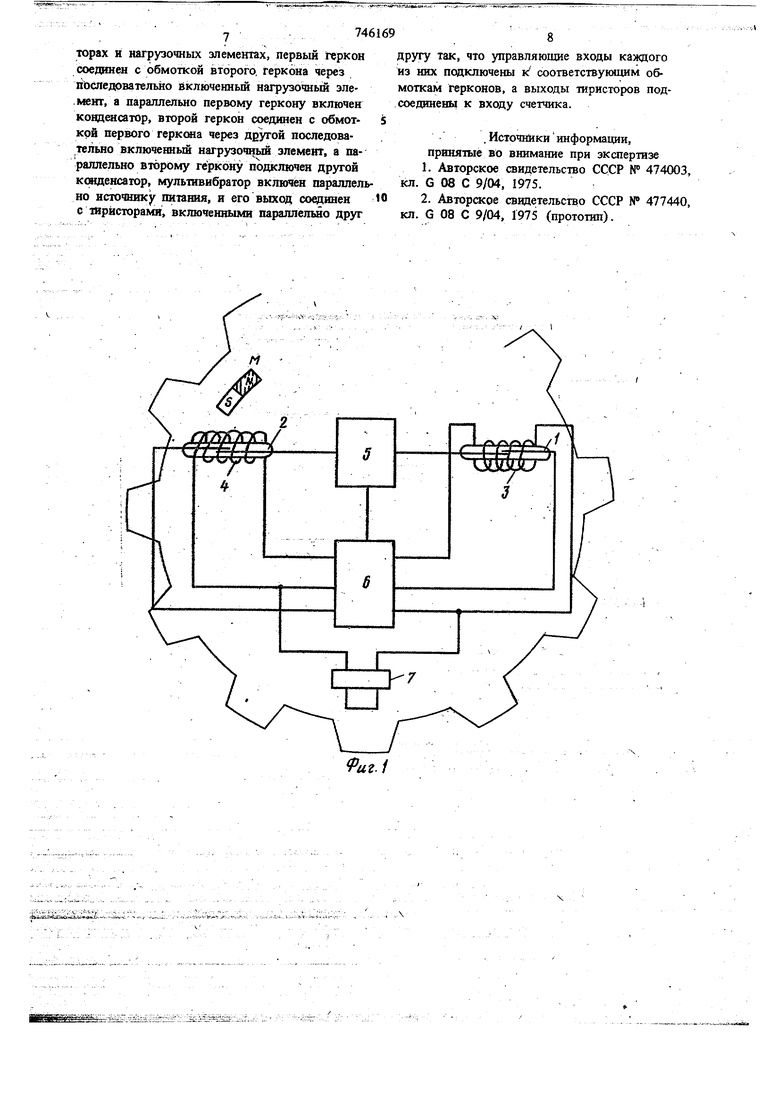
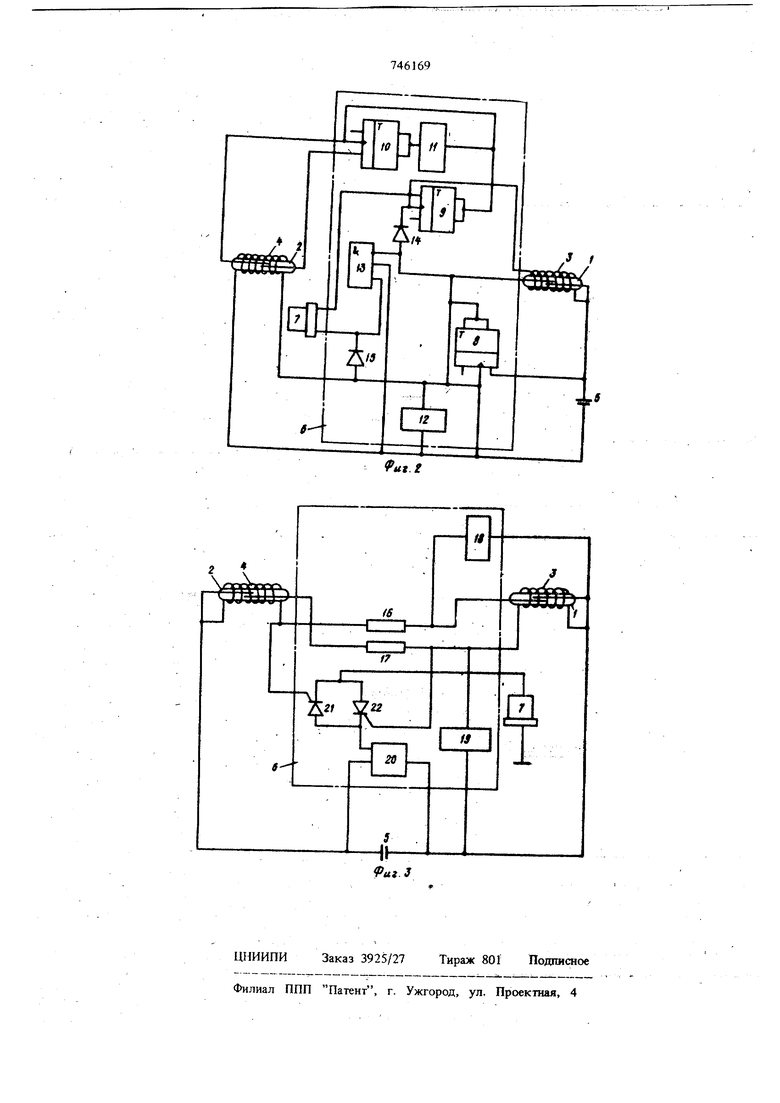
Изобретение относится к измерительной технике и может быть использовано в различных отраслях промышленности при контроле перемещений машин и механизмов. Известен дифференциальный датчик перемещений, содержащий постоянный магиит, связанный с перемещающимся объектом, герконы и катущки индуктивности, в поле которых размещены герконы, причем включенные герконы с переключающимися контактами, их замкнутые контакты соединены параллельно, а разомкнутые контакты служат для подключения к устройству измерения дифференциальных сигналов, кроме того, к катушкам подсоединен генератор пилообразного напряжения, а Магнит расположен мезкду катушками индуктивное™ Недостатком этого устройства является низкая точность измерений, так как погрешность системы измерения зависит от влияния внешних факторов. Например, небольшое отклонение маг нита от центра расположения между катушками сразу же приведет к неточности измерения. Это ограничивает диапазон применения устройства. Кроме того, датчик не позволяет измерять перемещения вращающихся тел, например линейный путь колеса. Известен также ревершвный датчик перемещений, являющийся наиболее близким по техничежой сущности к изобретению. Датчик содержит постоянный магнит, связьтаемый с перемещающиккя объектом, источник пи-т(яя, герконы, соецщненные с источником питания, конденсатор и счетчик, причем вторые контакты всех герконов подключены к источнику питания через конденсатор 2. Его недостатком является низкая точность измерения, обусловленная ложными срабатываниями герконов при колебании магнита между ними. Это определяет значительнзоо эксплуата1ШО1шую погрешность при использовании датчика для измерения перемещений реальных машин и механизмов и существенно ограничивает диапазон использования датчика. Целью изобретения является.повышение точности путем исключения ложного срабатьшания герконов. Поставленная цель достигается тем, что датчик снабжен катушками индуктивности, в поле которыхразмещены герконы, и блоком преобразования сигаалов, первый геркон соединен через блок преобразования сиИайбви Источник питания с обмоткой катушки индуктивносш второго геркона, а -второй геркон соединен через блок преобразования сигналов и источник питания с обмоткой катушки инцуктавности первого геркона, входы счетчика подключены к обмоткам первого и второго герконов. Блок преобразования сигаалов выполнен на счетных триггерах, элементе НЕ-И, диодах, первый геркон соед1шен с инверсным входом элемента НЕ-И, выхол. которого подключен к входу счетшка и через диод к обмотке второго геркона, которая соединена с другим входом элемента НЕ-И, параллельно первому геркону и обмо11се ивдуктивностя второ -о геркона включен счетный триггер и конденсатор, соединенные между собой, а параллельно второму геркону и обмотке индз ктивности первого геркона включены другой счетный триггер и ковденсатор, также соединенные между собой, счетчик подключен к входу третьего счетаого триггера, выход которого соед1шен с обмоткой вто рого геркена, а входы подключены к обмотке первого геркона и через другой диод к инверс ному входу элемента НЕ-И. Кроме того, блок преобразования сигналов может быть выполнен на мультивибраторе, тиристорах и на Ьузочных .элементах, первый геркон соединен с обмоткой второго геркона через последовательно включенный нагрузочный элемент, а параллелыю пер вому геркону включен конденсатор, второй геркон соединен с обмоткой первого геркона через другой последовательно включенный нагрузочный элемент, а параллельно второму геркону подключен другой конденсатор, мультивибратор включен параллельно источнику питания, и его выход соединен с тиристорами, вклю чёнными параллельно друг другу так, что управляющие входы каждого из них подключены к соответствующим обмоткам герконов, а выходы тиристоров подсоединенъ к входу счетчика. На фиг. 1 представлена принципиальная схема реверсивного датчика перемещений; на фиг. 2 и 3 принципиальные схемы блоков преобразования сигналов. Датчик содержит герконы 1 и 2, помещенные в поле катушек 3 и 4 индуктивности, источник 5 питания, блок 6 преобразования сигналов и счетчик 7. Геркон 1 соединяет источник 5 питания через блок 6 преобразования с обмоткой 4 геркона 2, а геркон 2 соединяет источник 5 питания через блок 6 преобразованкя сигаалов с оомоткрй 3 геркона 1. Оцин вход счетчика 7 подключен к обмотке 4 второго геркона, а другой его вход соединен с обмоткой 3. Сами герконы расположены над ПЛОСКОСТЬЮ контролируемого колеса на противоположных концах его диаметра. На апоскости колеса под герконами укреплен магнит 8. Блсяс 6 преобразования сигналов (фиг. 2) содержит счетные триггеры 9-11, конденсаторы 12 и 13, элемент НЕ-И 14 и диоды 15 и 16. Геркон 1 соединен с инверсньш входом элемента НЕ-И 14, виход которого подключен к входу счетчика 7 и через диод 16 к обмотке 14 второго геркона. Обмотка 4 подсоединена на другой вход элемента НЕ-И 14, и параллельно ей включен счетный триггер 9 и конденсатор 13, соединенные между собой. Параллельно обмотке 3 геркоиа 1 включены триггер 11 и конденсатор 12, также соединенные между собой. Выход счетчика 7 подсоединен к входу триггера 10, выход которого подключен к обмотке 4 геркона 2, а входы соединены с обмоткой 3 геркона I и через диод 15 с инверсным входом элемента НЕ-И 14. Второй вариант схемного решения блока 6 преобразования сигналов представлен на фиг. 3. Схема содержит нагрузочные элементы 16 и 17, конденсаторы 18 и 19, мультивибратор 20 и тиристоры 21 и 22. Геркон 1 соединяется с обмоткой 4 геркона 2 через последовательно включенный нагрузочный элемент 16. Параллельно геркону 1 включен конденсатор 18. Второй геркон соединен с обмоткой 3 геркона 1 через последовательно включенный нагрузочный элемент 17, а параллельно второму геркону включен конденсатор 19. Мультивибратор 20 соединен параллельно ; источнику питания 5, а его выход соединен с тиристорами 21 и 22, включенными параллельно друг другу. Управляющие входы тиристоров соединены с соответствующими обмотками. Выходы тиристоров 21 и 22 подключены к входу счетчика 7. Датчик работает следующим образом. До начала движения колеса оба геркона 1 и 2 разомкнуты, и напряжение в схеме отсутствует. При движении колеса впередпостоянный магнит 8 срверщает оборот и проскакивает под первымгерконом 1, замыкая его (фиг. 1). Напряжение от источника 5 питания поступает на обмотку 4 геркона 2 через блок 6 преобразования сигналов. В обмотке 4 появляется экранирующее магнитное поле, препятствующее замьжанию геркона 2 при прохождении под ним магнита 8 при дальнейшем движении колеса, Время существования поля катущки 4 задается в блоке 6 преобразования сигналов. Одновременно напряжение р.т источника 5 питания поступает на вход счетчика 7, представляющего собой, например, электрохимический интегратор, на котором протекает реакдия переноса металиа через электролит пропорционально Протека57ющему через интегратор току, т.е. запись информации о движении колеса вперед- При дал нейшем его движении в этом направлении постоянный магнит 8 замыкает все время геркон 1, схема срабатьшает, и на счетчике 7 фик Сируется новое значение. Если контролируемое колесо начинает днигаться в другом направлении, например назад, магнит 8 вначале нроходит под герконом 2, к торый замыкается и подключает источник 5 пи тания к обмотке 3 геркона 1. При этом напря жение подается на второй вход счетчика 7, и осуществляется корректировка накопленного сигнала о движении колеса вперед (например списьгоается количество информации, соответствующее пройденному назад пути). Таким образом, датчик позволяет фиксировать расстояние, пройденное контролируемым объектом, в данном случае колесом, учитывая при этом направление движения объекта. Блок преобразования сигналов по схеме на фиг. 2 работает следующим образом. При замыкании геркона 1 триггер 9 устанавливают так, чтобы сигнал с его выхода попадал на обмотку 4. Напряжение с выхода триггера 9 поступает также на инверсный вход элемента НЕ-И 14, запирая его, и на конденсатор 13 и через диод 16 подается на вход счетчика 7. Конденсатор 13 задает время протекания тока через счетчик 7 .и существования поля катущки 4 (пока не разрядится емкость 12). После прохождения магнита 8 под герконом 2 на выходе конденсатора 13 появится сигнал, который перебросит триггер 9 в перво начальное положение. При замыкании геркона 2 первым напряжение поступает на триггеры 10 и 11 и на кон денсатор 12. Диод 15 препятствует попаданию сигнала на инверсный вход элемента НЕ-И 14. Сигнал с выхода триггера Ш поступает на дру Гой вход счетчика 7, осуществляется перезапис информации. Емкостью конденсатора 12 задается время перезаписи. При разрядке конденсатора 12 схема возвращается в первоначальное положение. На, фиг. 3 приведена еще одна схема блока 6 преобразования , которая работает следующим образом. При замыкании геркона 1 первым сигнал проходит через нагрузочный элемент 17.на конденсатор 18, заряжая его емкость. Одновременно сигнал устанавливает в открытое положение тиристор 21, который пропускает с выхода мультивибратора 20 импульсы положительной полярности на вход счетчика 7. Мультивибратор 20 работает в автоколебательном режиме. На счетчике 7 записывается информация о движении контролируемого объекта вперед. Время записи задается временем разряда емкости конденсатора 18, при разрядке, которой выключается тиристор 21 и перестает пропускать импульсы на вход счетчика 7. .При замыкании геркона 2 первым схема работает аналогично. Тиристор 22 пропускает на вход счетчика импульсы отрицательной полярности, что приводит к перезаписи информации на счетчике 7. Изобретение имеет следующие преимущества: повышается точность датчикв за счет исключения эксплуатационной погрешности при ложном срабатьгааиии герконов, I что достигается защитными магнитными полями катушек и работой электронных схем блоков преобразования сигналов. Формула изобретения 1. Реверсивный дагшк перемещений, содержащий постоянный магнит, связываемый с перемещающимся объектом, источник питания, герконы, соединенные с источником питания, конденсатор и счетчик, отличающийс я тем, что, с целью повышения точности путем исключения ложных срабатьгеаний герконов, он снабжен катушками индуктивности, в поле которых размещены герконы, и блоком преобразования -сигналов, первый геркон соединен через блок преобразования сигналов и ис; тгочник питания с обмоткой катушки индуктивности второго геркона, а второй геркон соединен через блок преобразования сягналов и источник питания с обмоткой катушки индуктивности первого геркона, выходы счетчика подключены к обмоткам первого и второго герконов. 2. Реверсивный датчик по п. 1, о т л ичающийся тем, что блок преобразования сигналов вьшолнен на счетных триггерах, элементе НЕ-И и диодах, первый геркон соединен с инверсным входом элемента НЕ-И, выход которого подключен к входу сметчика и через диод к обмотке второго геркона, которая соединена с другим входом элемента НЕ-И, параллельно первому геркону и обмотке индуктивности второго геркона включен счетный триггер и конденсатор, соединенные между собой, а паралелльно второму геркону и обмотке индуктивности первого геркона включень другой счетный триггер и конденсатор, также соединенные между собой, счетчик подключен к входу третьего счетного триггера, выход которого соединен с обмоткой второго геркона, а входы подключены к обможе первого геркона и черлз другой диод к инверсному входу элемента НЕ-И. 3. Реверсивный датчик по п. 1, о т л и ч аю щ и и с я тем, чта блок преобразования сигналов вьшолнен на мультивибраторе, Гирису.746169 торах и нагрузочных элементах, первый геркон соединен с обмоткой второго, геркона через последовательно включенный нагрузочньш эле. мент, а параллелысо первому геркону включен кооденсатор, второй геркон соединен с обмот- s кой первого через другой последовательно включенный нагрузоч1|ый элемент, а параллельно второму геркону подключен другой ксязденсатор, мультивибратор включён параллельно источнику питания, и его выход соединен О с тиристорами, включенными параллельно друг другу так, что управляющие входы каждого из них подключены к соответствунмцим обмоткам герконов, а выходы тиристоров подсоединешл к входу счетчика. . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 474003, кл. G 08 С 9/04, 1975. 2.Авторсясое свидетельство СССР N 477440, кл. G 08 С 9/04, 1975 (протопш).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для токовой защиты | 1975 |
|
SU667175A3 |
| Устройство для ввертывания сердечников в катушки | 1987 |
|
SU1642531A1 |
| Источник питания для технологических установок постоянного тока | 1990 |
|
SU1742968A1 |
| Устройство для измерения линейных перемещений | 1980 |
|
SU949329A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Генератор импульсов | 1990 |
|
SU1831765A3 |
| УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2018961C1 |
| ГЕНЕРАТОР ВЫСОКОВОЛЬТНЫХ ИМПУЛЬСОВ | 1997 |
|
RU2119246C1 |
| Способ генерирования импульсов магнитно-тиристорным генератором и магнитно-тиристорный генератор | 1984 |
|
SU1356217A1 |
| Устройство для регулирования подачи воздуха в двигатель внутреннего сгорания | 1989 |
|
SU1746016A1 |
йЛ ЛЙлЙО й.
У f
иг g
