(5) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь линейных перемещений | 1975 |
|
SU744232A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| МАГНИТНЫЙ ИНДУКЦИОННЫЙ ДАТЧИК УДАРНЫХ ВОЛН | 2021 |
|
RU2778628C1 |
| Источник питания для технологических установок постоянного тока | 1990 |
|
SU1742968A1 |
| ИНДУКТИВНЫЙ БЕСКОНТАКТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2002 |
|
RU2223567C2 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| Поплавковый индуктивный уровнемер | 1980 |
|
SU916995A1 |
| Измеритель напряженности электростатического поля | 2016 |
|
RU2643701C1 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
1
Изобретение относится к контрольно-измерительной технике и может быть использовано, в частности для преобразования линейных перемещений в электрический сигнал переменной частоты, используемый, например, в системах регулирования скорости вращения электроприводов переменного тока в функции положения подвижного регулирующего элемента.
Известны автогенераторные преобразователи перемещений, содержащие индуктивный датчик перемещений и автогенератор, в колебательный контур которого включена обмотка индуктивности датчика СО.
Недостатками преобразователей являются ограниченная выходная мощность и относительно узкий частотный диапазон работы, обусловленный наличием ферромагнитных деталей датчика в частотно-задающей цепи автогенератора.
Наиболее близким к изобретению является устройство для измерения линейных перемещений, содержащее индуктивный датчик перемещений и подJ ключенный к источнику постоянного тока преобразователь частоты, выполненный в виде мостового инвертора на тиристорах. Частотно-задающий контур преобразователя частоты сос10 тоит из конденсатора, катушки с постоянной индуктивностью и регулируемой с помощью датчика дополнительной катушкой индуктивности 2.
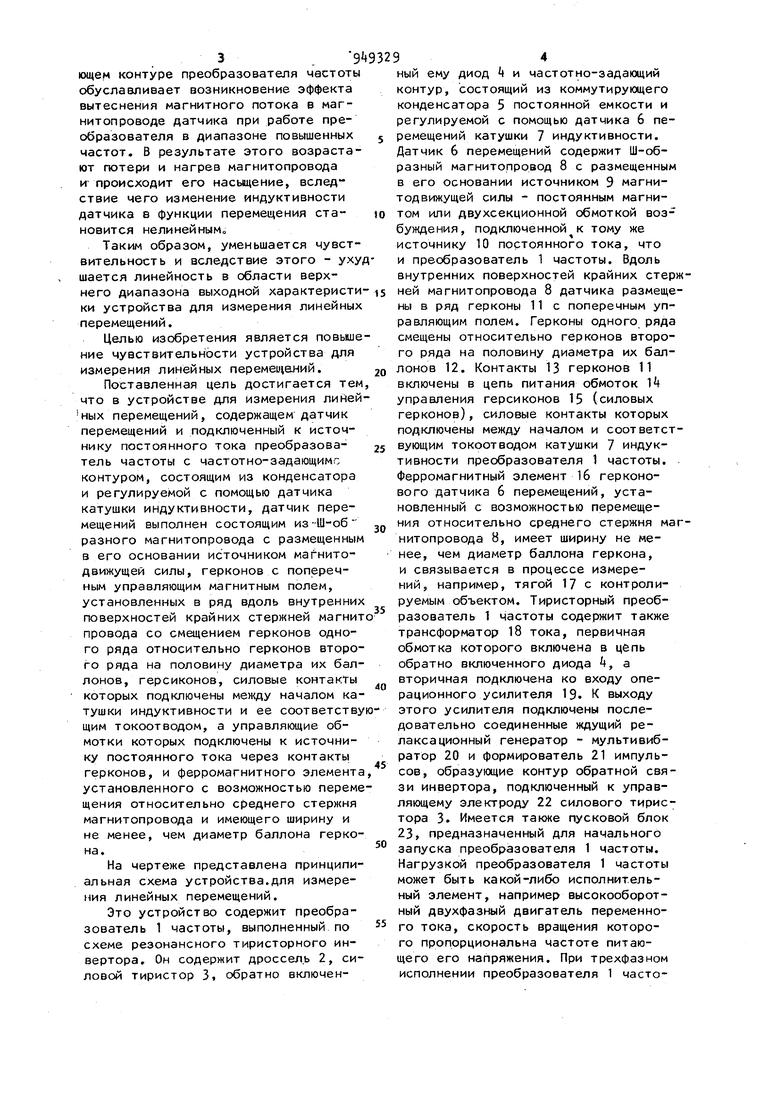
Поскольку регулируемой частью индуктивности указанного контура является сама размещенная на магнитопроводе обмотка индуктивного-датчика, индуктивность которой изменяется в функции положения подвижного го относительно магнитопровода ферромагнитного элемента - якоря датчика, то наличие указанных, ферромагнитных элементов в частотног-зада3 . 3 ющем контуре преобразователя частоты обуславливает возникновение эффекта вытеснения магнитного потока в магнитопроводе датчика при работе преобразователя в диапазоне повышенных частот. В результате этого возрастают потери и нагрев магнитопровода и происходит его насьщение, вслед ствие чего изменение индуктивности датчика в функции перемещения становится нелинейным Таким образом, уменьшается чувствительность и вследствие этого - уху шается линейность в области верхнего диапазона выходной характеристи ки устройства для измерения линейных перемещений. Целью изобретения является повьше ние чувствительности устройства для измерения линейных перемещений. Поставленная цель достигается тем что в устройстве для измерения лийей ных перемещений, содержащем датчик перемещений и подключенный к источнику постоянного тока преобразователь частоты с частотно-задающимс контуром, состоящим из конденсатора и регулируемой с помощью датчика катушки индуктивности, датчик перемещений выполнен состоящим из-Ш-об разного магнитопровода с размещенным в его основании источником магнитодвижущей силы, герконов с поперечным управляющим магнитным полем, установленных в ряд вдоль внутренни поверхностей крайних стержней магни провода со смещением герконов одного ряда относительно герконов второ го ряда на половину диаметра их бал лонов, герсиконов, силовые контакты которых подключены между началом ка тушки индуктивности и ее соответству щим токоотводом, а управляющие обмотки которых подключены к источнику постоянного тока через контакты герконов, и ферромагнитного элемент установленного с возможностью переме щения относительно среднего стержня магнитопровода и имеющего ширину и не менее, чем диаметр баллона геркона. На чертеже представлена принципиальная схема устройства.для измерения линейных перемещений. Это устройство содержит преобразователь 1 частоты, выполненный по схеме резонансного тиристорного инвертора. Он содержит дроссель 2, силовой тиристор 3, обратно включен94ный ему диод k и частотно-задающий контур, состоящий из коммутирующего конденсатора 5 постоянной емкости и регулируемой с помощью датчика 6 перемещений катушки 7 индуктивности. Датчик 6 перемещений содержит Ш-образный магнитопровод 8 с размещенным в его основании источником 9 магнитодвижущей силы - постоянным магнитом или двухсекционной обмоткой возбуждения, подключенной к тому же источнику 10 постоянного тока, что и преобразователь 1 частоты. Вдоль внутренних поверхностей крайних стержней магнитопровода 8 датчика размещены в ряд герконы 11 с поперечным управляющим полем. Герконы одного ряда смещены относительно герконов второго ряда на половину диаметра их баллонов 12. Контакты 13 герконов 11 включены в цепь питания обмоток управления герсиконов 15 (силовых герконов), силовые контакты которых подключены между началом и соответствующим токоотводом катушки 7 индуктивности преобразователя 1 частоты. Ферромагнитный элемент 16 герконового датчика 6 перемещений, установленный с возможностью перемещения относительно среднего стержня магнитопровода 8, имеет ширину не менее, чем диаметр баллона геркона, и связывается в процессе измерений, например, тягой 17 с контролируемым объектом. Тиристорный преобразователь 1 частоты содержит также трансформатор 18 тока, первичная обмотка которого включена в цепь обратно включенного диода k, а вторичная подключена ко входу операционного усилителя 19. К выходу этого усилителя подключены последовательно соединенные ждущий релаксационный генератор - мультивибратор 20 и формирователь 21 импульсов, образующие контур обратной связи инвертора, подключенный к управляющему электроду 22 силового тиристора 3. Имеется также пусковой блок 23, предназначенный для начального запуска преобразователя 1 частоты. Нагрузкой преобразователя 1 частоты может быть какой-либо исполнительный элемент, например высокооборотный двухфазный двигатель переменного тока, скорость вращения которого пропорциональна частоте питающего его напряжения. При трехфазном исполнении преобразователя 1 часто5ты в качестве исполнительного элемен может быть использован трехфазный асинхронный двигатель с короткозамкнутым ротором. Выходная частота преобразователя может измеряться, например, подключенным параллельно к исполнительному элементу 2 частотомером 25. Устройство для измерения линейны перемещений работает следующим образом о При подключении источника 10 постоянного тока к устройству и подач пускового импульса с выхода блока 23на управляющий электрод 22 тирис тора 3 преобразователя 1 частоты, последний возбуждается, и в нем нач нается колебательный процесс между емкостью конденсатора 5 и индуктивностью катушки 7 не имеющей ферромагнитного сердечника. После того, как ток через обратный диод 4 во второй половине периода колебаний тиристорного инвертора спадает до нуля и переходит через него, на выходе операционного усилителя 19 тока с помощью трансформатора 18 фо мируется прямоугольный импульс, который задерживается на расчетную длительность ждущего мультивибратора 20, а затем подается на управляющий электрод 22 тиристора 3. Преобразователь 1 частоты в результате переходит в автогенераторный режим работы,частота колебаний на выходе которого определяется собственной частотой его частотно-задающего контура и изменяется в зависи мости от индуктивности катушки 7. По следняя зависит от положения ферромагнитного элемента 16 датчика 6 пе ремещений. В этом датчике магнитный поток, создаваемый источником 9 ма|- нитодвижущей силы, замыкается по крайним стержням. воздушному промеж
ку между ними и подвижным феррома - нитным элементом 16, самому элементу 16 и среднему стержню магнитопровода 8, обеспечивая замыкание того геркона 11, против которого размещен подвижный элемент 16.
При пеоемещении ферромагнит- ного элемента 16 замыкаются поочередно контакты верхних и нижних герконов 11, Благодаря тому, что ширина подвижного ферромагни ного элемента 16 выбирается равной или большей диаметра баллона герконов 11, в каждый момент времени под
роком диапазоне.
Формула изобретения
Устройство для измерения линейных перемещений, содержащее датчик перемещений и подключенный к источнику постоянного тока преобразователь частоты с частотно-задающим контуром, состоящим из конденсатора и регулируемой с помощью датчика катушки индуктивности, отличаю,щееся тем, что, с цепью повьшения чувствительности, датчик перемацений выполвоздействием магнитного потока датчика 6 перемещений находится только одна пара контактов 13 герконов 11, обеспечивая их надежное замыкание или замыкание (за счет разброса магнитных параметров герконов) двух соседних герконов. Контакты 13 очередного включаемого геркона 11 замыкаясь, подключают к ИСТОЧНИКУ 10 обмотку 14 управления соответствующего герсинона 15. Герсиконы 15 при своем поочередном замыкании шунтируют различное число витков обмотки, изменяя ее индуктивность, а следовательно, и выходную частоту преобразователя 1 частоты. Благодаря тому, что баллоны верхнего и нижнего рядов герконов 11 сдвинуты один относительно другого на половину их диаметра, повышается дискретность преобразования перемещений и чувствительность устройства, которая может быть опр :делена как отношение приращения частоты uf на вы- V ходе преобразователя 1 частоты к изменению Дх координаты положения подвижного элемента 16 датчика. При этом, вследствие отсутствия потерь, в стали в частотно-задающем контуре преобразователя 1 настоты, его частотный диапазон может быть существенно расширен, составляя 10-8000 Гц (oi- раничение сверху обусловлено частотными свойствами тиристоров). При этом чувствительность 5 к перемещению в диапазоне 0,3 м может составить i 8000-10 26000 Гц/м. Таким образом, частотный магнитогерконовотиристорный преобразователь перемещений обладает высокой чувствительностью и позволяет преобразовать механические перемещения в электрический сигнал большой мощности (без дополнительных промежуточных усияителей ) с частотой, регулируемой в ши
