(54) БУРОВАЯ.ВИБРОУСТАНОВКА

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНТАЖА И СТАБИЛИЗАЦИИ МОРСКОГО БУРОВОГО МОНООПОРНОГО ОСНОВАНИЯ | 2003 |
|
RU2245437C1 |
| Вибромолот | 1990 |
|
SU1745863A1 |
| СПОСОБ МОНТАЖА И СТАБИЛИЗАЦИИ БУРОВОГО МОНООПОРНОГО ОСНОВАНИЯ НА ДНЕ МОРЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2278943C2 |
| ГРУНТОНОС УДАРНОГО ДЕЙСТВИЯ | 1972 |
|
SU352001A1 |
| СПОСОБ МОНТАЖА И СТАБИЛИЗАЦИИ МОРСКОГО БУРОВОГО ОДНОКОЛОННОГО ОСНОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2171349C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| МОЛОТ | 2000 |
|
RU2186175C2 |
| Вибропогружатель с двигателем, вынесенным из зоны вибрации | 1955 |
|
SU103929A1 |
| ГИДРАВЛИЧЕСКИЙ БУРИЛЬНЫЙ ЯС ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2013 |
|
RU2521993C1 |
| Устройство для бурения скважин для установки полимерных гидроигл | 1989 |
|
SU1666675A1 |
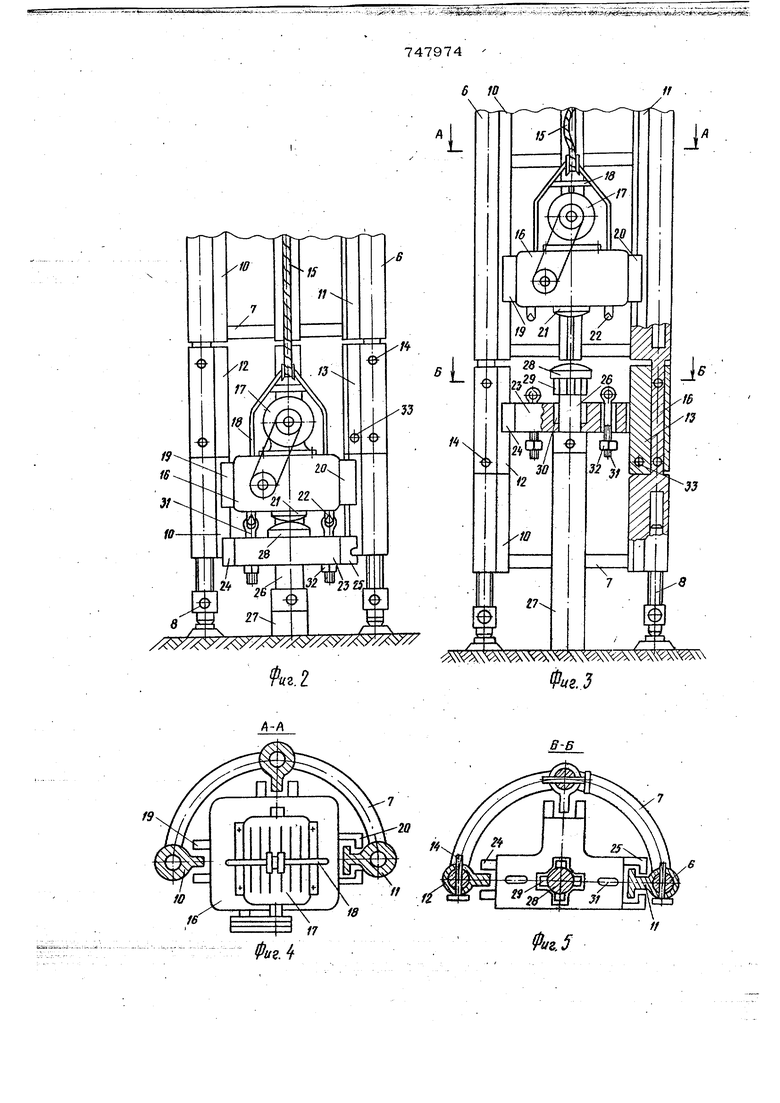
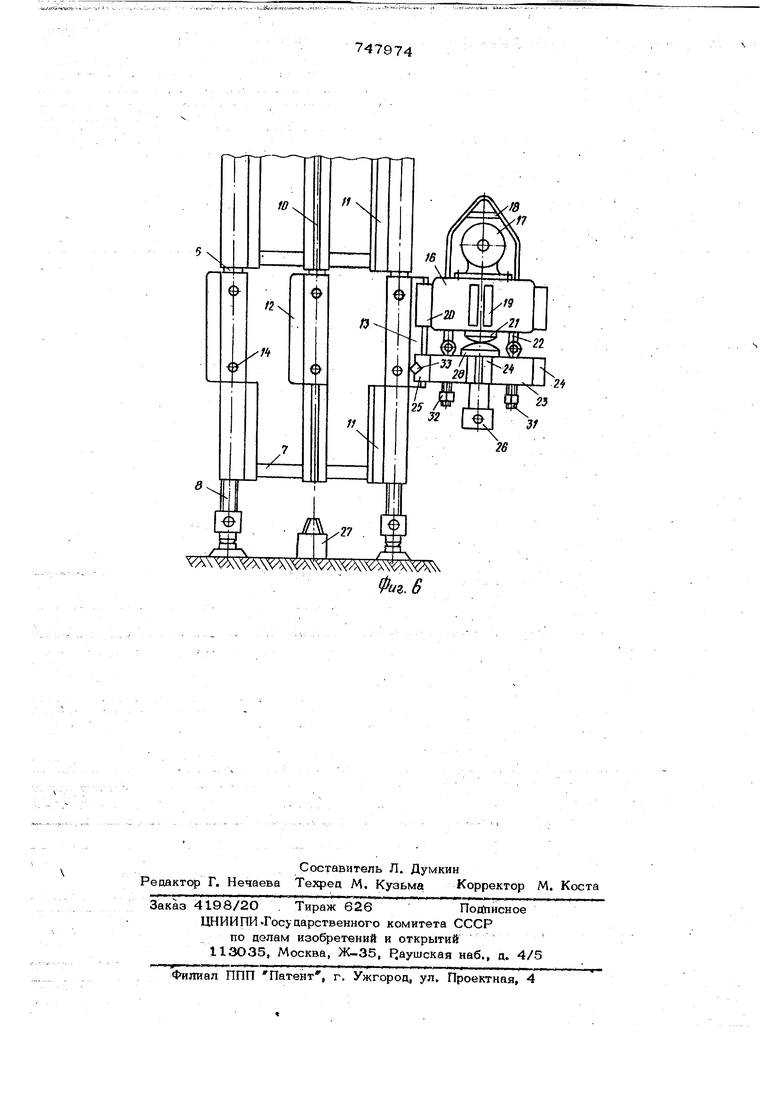
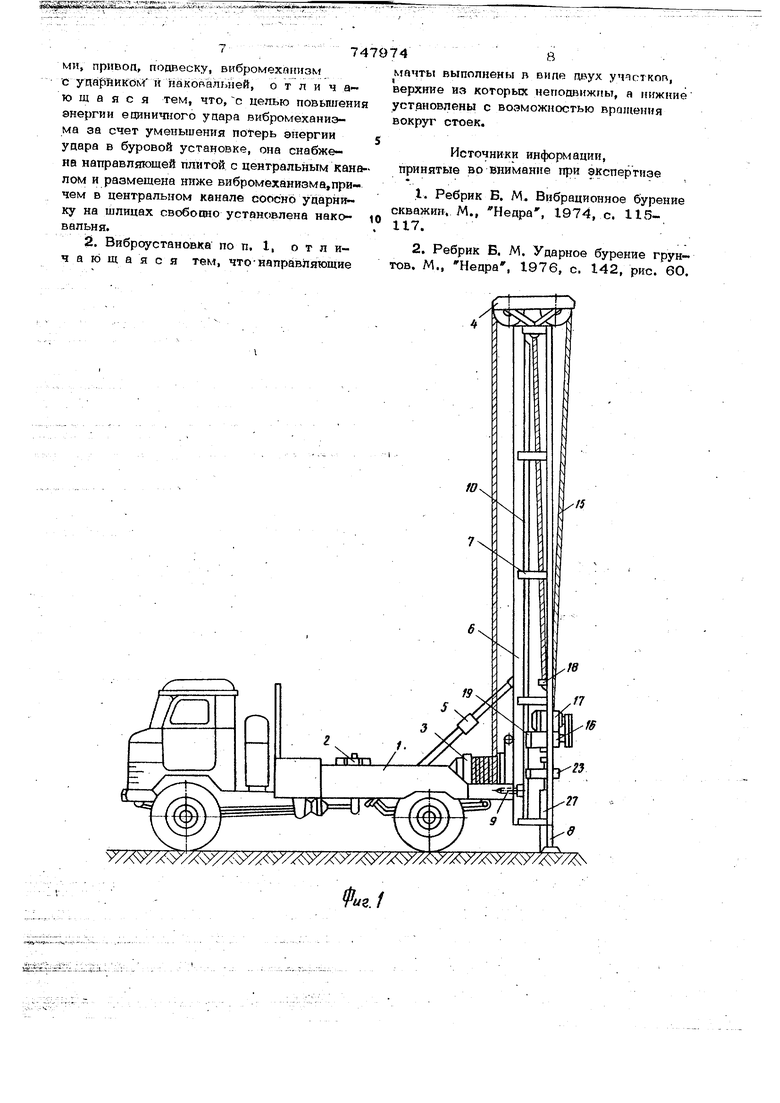
Изобретение относится к буровой техН нике, в частности к буровым станкам дл вибробурения,и может быть использовано при бурении изыскательских и геологораз ведочных скважин и погружении в грунт свай и зондов. Известна буровая виброустановка, содержащая, мачту со стойками, привод, по веску и вибромеханизм l. Однако эта установка обладает малой погружающей способностью, так как в них использован безударный вибромеханизм. Наиболее близкой к предлагаемой по технической сущности является буровая виброустановка, содержащая мачту со стойками и направляющими, привод, подве ку, вибромеханизм с ударником и наковальней 2. Недостатки известной буровой виброустановки заключаются в малой величине энергии единичного удара вибромеха- низма и затруднении проведения спускопоцъемньк операций. Цель изобретения - повышение энергии единичного удара вибромеханизма за счет уменьшения потерь энергии уцара в буровой установке. Это достигается тем, что буровая виброустановка предлагаемой конструкции снабжена направляющей плитой с центральным каналом и размещена ниже вибромеханизма, причем в центральном канале соос- но ударнику на шлицах свободно установлена наковальня. Направляющие мачты выполнены в виде двух участков, верхние из которых непосн вижны, а нижние установлены с возможностью вращения вокруг стоек, На фиг. I изображена предлагаемая буровая виброустпновка; на фиг. 2 - схема работы установки в вибрационном режиме; на ф1Г. 3 - схема работы установки Е виброударном и ударном режимах; на фиг. 4 - разрез А-А на фиг. 3; на фиг.5разрез Б-Б на фиг. 3 на фиг. 6 - схема расположения вибромеханизма при спускоподъемных операциях. Буровая виброустановка состои-г из рамы I с хоцовой частью, на которой установлены источник здергопитания 2, лебед ка 3, м&чта 4 с подъемником 5. Мачта 4 имеет три или более стойки 6, соединенные поясом 7 так, что в плане образуется полукруглая или многоугольная форма мачты 4с открытой передней гранью. Центральная стойка б соединена шарнирно с рамой I и подъемником 5, а боковые стойки 6 снабжены регулировочными винтовыми домкратами 8, В процессе работы буровой виброустановки центральная стойка 6 мачты 4 скреплена с рймой 1 болтом 9, а две боковые стой -ки 6 через башмаки домкратов 8 опира ются о грунт. По длине центральной сто и одной боковой стоек 6 уст ановлены направляющие 10, а по длине второй боковой стойки 6 - направляющая 11, отличающаяся от направляющих 10 по.форме в пл плане. Направляющие 10 и 11 установлены жестко на стойках 6. Нижние направляющие участки 12 и 13 установлены независимо от направляющих Ю и 11 с возможностью вращения вокруг оси стоек 6 и фиксации в двух диаметрально противоположных положениях при помощи болтов 14. На тро ве 15 лебедки 3 подвешен вибромеханизм 16 с электромотором 17 с помощью подвески 18, Вибромезсанизм 16 через , направляющие 19 и 20 .взаимодействуют с направляющими 10 и 11 и с их нижними участками 12 и 13.,Са::тавными элементами вибромеханизма 16 даляются ударник 21 и крючки 22, на них подвеше на направляющая плита 3, которая ими направляющими 24 и 25 взаимодействует с направл5пощими 10 и 11 и их нижними участками 12 и 13; В направляющей плите 23 соосно с удараиком 21 имеется сквозной цилиндрический канал, в котором установлен с воэ можностью поступательного и вращательного движения переходник 26 под погружа мые элементы 27. С верхним Концом перехбдни;ка 26 жестко соединена наковаяьня 28, на наружной поверхности которой установлены фиксируюВДе продольные шли ЦТ 29, расположенные симметрично по периферии наковальни 28 и в соответстви с продольными пазами 30, выполненными на боковой поверхности стенок цилиндрического . канала направляющей плиты 23. В теле нанравляющей плиты 23 параллель но и симметрично оси переходника 26 имеются два сквозных отверстия, 6 которызс свободно установлены болты 31 с проушинами под крючки 22 или промежу точные соединительные цепи и регулировочые гайки 32. При транспортировке вибоустановки, вьшолнении спуско-подъемных операций и работ у устья скважины виб-i ромеханизм закрепляется да мачте 4 болтом 33, свободно вставляемым в соосые отверстия направляющих 13 и 25. Работает буровая виброустановка следующим образом. В точке бурения мачта 4 подъемником 5 переводится в вертикальное положение, крепится к раме I болтом 9, центриру- ется и укрепляется домкратами 8. Затем болт 33 разгружается, от веса вибромеханизма при помощи лебедки. 3, извлекается из соосных отверстий, направл:яющих 13 и 25, и вибромеханизм 16 и соединенная с ним цепями или болтами 31 направляк Щая плита 23 поднимаются по напр лйго-щим мачты 4 вверх на высоту,равнуюдлйнё первого погружаемого элемента 27, с которым жестко соединяется (например, посредством резьбы) переходник 26. Подачей напряжения от источника энергопитания 2 к электромотору17 вибромеханизм запускается в работу, -п первый погружаемый элемент 27 внедряется в грунт на всю свою длину. Оосле этого подача Hanpj жения к-электромотору 17 прекращается, переходник 26 отсоеданяется от погружаемого элемента 27, лебедкой 3 виброме ханизм тросом 15 поднимается по направляющим мачты на высоту, равную длине последующего погружаемого элемента, нижний конец которого жестко соединяется с внедренным элементом, а верхний с переходником 26. Таким образом, процесс внесения погружаемых дяементов 27 повторяется до достижения необходимой глубины. В зависимости от веса погружаемых элементов 27, их соединение с переходником 26 осуществляется вращением элемента 27 приневращающемся переходнике 26, или наоборот. В первом случае направляющая плита 23 находится в подвешенном состоянии, и переходник 26 под действием силы тяжести находится нижнем положении. При этом продол ные шлицы 29 и наковальня 28 находятся в продольных пазах 30 направляющей плиты 23, что предотвращает проворачивание переходника 26 в процессе наворачивания на него погружаемь1х элементов 27 снизу. Во втором случае первый погружаемый элемент 27 своим ййжним концом устанавливается на землю, а послегпгющие наворачиваются на выстутающие концы внедренных элементов в грунт, механизм 16 приспускается до lynopa переходника 26 в элемент 27 и далее до выхода продольных шлицов 29 из продольных пазов 30, и вращением переходаика 26 осушествл ется его жес кое соединение с погружаемыми элемен;тами 27. : При расположении шлицов 29 и па;эов 30, описанном в последнем случае, вращением переходника 26 в обратную сторону осуществляется его отсоединени от погружаемых элементов 27. При проведении спуско-подъемных опе раций механизм 16 отведен в сторону от устья скважины. Осуществляется это следующим образом. Лебедкой 3 виброме ханизм 16 с подвешенной к нему направ лялощей плитой 23 поднимается по направляющим 10, 11, 12 и 13 мачты 4 до совмещения соосных отверстий направляющих 13 и 25, и в эти отверстия вставляется болт 33. После этого из направляющих 12 и 13 извлекаются фиксирующие болты 14, вибромеханизм 16, зафиксированный в направляющей 13 бол том 33, отводится в сторону от устья скважины, от подвески 18 отсоединяется трос 15 и используется для спуска в скважину для подъема элементов 27. Перевод вибромеханизма в рабочее положение производится в обратной после довательности: к подвеске ;18 подсоединяется трос 15, вибромеханизм 16 с направляющей 13 поворотом вокруг стойки мачты 4 заводится на устье скважины цо совмещения направляющих 12. и 24, а направляющие 12 и 13 фиксируются болтами 14, болт 33 разгруйсается от веса вибромеханизма 16 при помощи лебедки 3 натяжением троса 15 и извлекается из соосньс; отверстий направляющих 13 и 25, вибромеханизм 16 с направляющей плитой 23 перемещается по мачте 4 в положение, необходимое для соединения переходника 26 с погружаемыми элементами 27. При проходке песков работа буровой виброустановки эффективна только в вибрационном режиме, и это обеспечивается, Когда направляющая, плита 23 соединена с вибррмеханизмом 16 цепями и болтами 31 и зазор между ударником 21 и наковальней 28 полностью ликвидирован при помощи регулировочных гаек 32. Проходка плотных грунтов эффективна при работе установки только ввиброударном режиме. Это обеспечивается, когда 7 746 вибромеханизм 16 не совсем соединен с направляющей плитой 23, или с целью сокращения вспомогательных операций по наращиванию погружаемых элементов при . бурении соединен цепями, длины которых больше максимально возможной высоты отскока вибромеханизма 16 от наковальни 28. При этом отсутствуют потери на трение из-за перекосов в направляющих мачты 4. Поэтому высота отскока вибромеханизма 16, а следовательно, и энергия единичного удара и производительность буровой виброустановки повышаются. Извлечение из скважин отсадных труб осуществляется при частом поочередном 1нанесении ударов по трубам вверх и вниз. Это снижает эффективность работы вибромолота, не всегда дает положительные результаты и часто приводит к обрьшам троса, поломкам мачты и т. п. Больший эффект навлечепия труб достигается при частом поочередном нанесении ударов по трубам вверх и вниз. Это достигается только путем регулировки гайками 32 зазора между ударником 21 и наковальней 28. При наличии зазора в- пределах допустимой величины дополнительного растяжения лебедочного троса 15 вибромеханиз мом 16 последний при движении его дебалансов вверх наносит уцар на выбивание труб, а при движений дебалансов вниз забивает трубы. Таким образом, осуществляется вибрация труб в вертикальном направлений, т. е. их расхаживание при nocTOSMHO приложенной силе лебедки на извлечение труб. В то же время отсутствует опасность преждевременного обрььва троса и прочих поломок, так как раз™ , рушающее влияние вибромеханизма ограни- чено величиной зазора между ударником 21 и наковальней 28. Предлагаемая буровая виброустановка позволяет бурить ударным способом без применения специальных тяжелых забивных снарядов . Для этого вибромеханизм 16 совсем отсоединяют от направляющей плиты 23 и используют в качестве забивного снаряда, то есть лебедкой 3 механизм 16 по мачте 4 поднимается на необходимую высоту и сбрасывается на наковальню 28, соединенную через переходник 26 с погружаемыми элементами 27. Формула изобретения I. Буровая виброустановка, содержаая мачту со .стойками и направляющи- ми, привод, поцвеску, вибpoмexйииз f С ударйикой и наковальней, отличающаяся тем, что, с целью повьшгени энергии единичного уаара вибромеханиэма за счет уменьшения потерь энергии удара в буровой установке, она снабжена направляющей плитой с центральным кан лом и размещена ниже вибромеханизма,при чем в центральном канале соосно ударнику на шлицах свободно установлена наковальня. 2. Виброустановка по п, I, о т л ичающаяся тем, что-направляющие
(
Й/г./
j,S;;C L:i:: . i --, 7748 мачты выполнены п випе №ух уч-тстков, верхние из которых неподвнжпы, а нижние установлены с возможностью вращения вокруг стоек. Источники информации, принятые во внимание при экспертизе ,1. Ребрик Б. М« Вибрационное бурение скважин, М., Недра, 1974, с. 115117. 2. Ребрик Б. М. Ударное бурение грунтов. М., Недра, 1976, с. 142, рис. 60. fuz..
747974 fej Фиг.5
Фиг. В
