Предметом изииретошш является вибропогружатель, для потружения и извлечения из грунта обсадных труб, евай, шпунта и т. п. при бурении скважин, сооружении фундаментов и производстве других строительных работ.
Описываемый ниже вибропогружатель имеет перед известными то преимущество, что он снабжен опорой, выполненной из HiapnupHO соединенных между собой стержней, которые онираются на раму и ПОЗВОЛ51ЮТ вибратору перемещаться по вертикали, что обесиечивает крепление погружаемого элемента к вибратору в неiiOcpeiCTBcHiioft близости к поверхности погружения и тем повышает эффективность работы механизма; кроме того, для крепления погрулс.аемого элемента к вибратору применяется хомут с плашками.
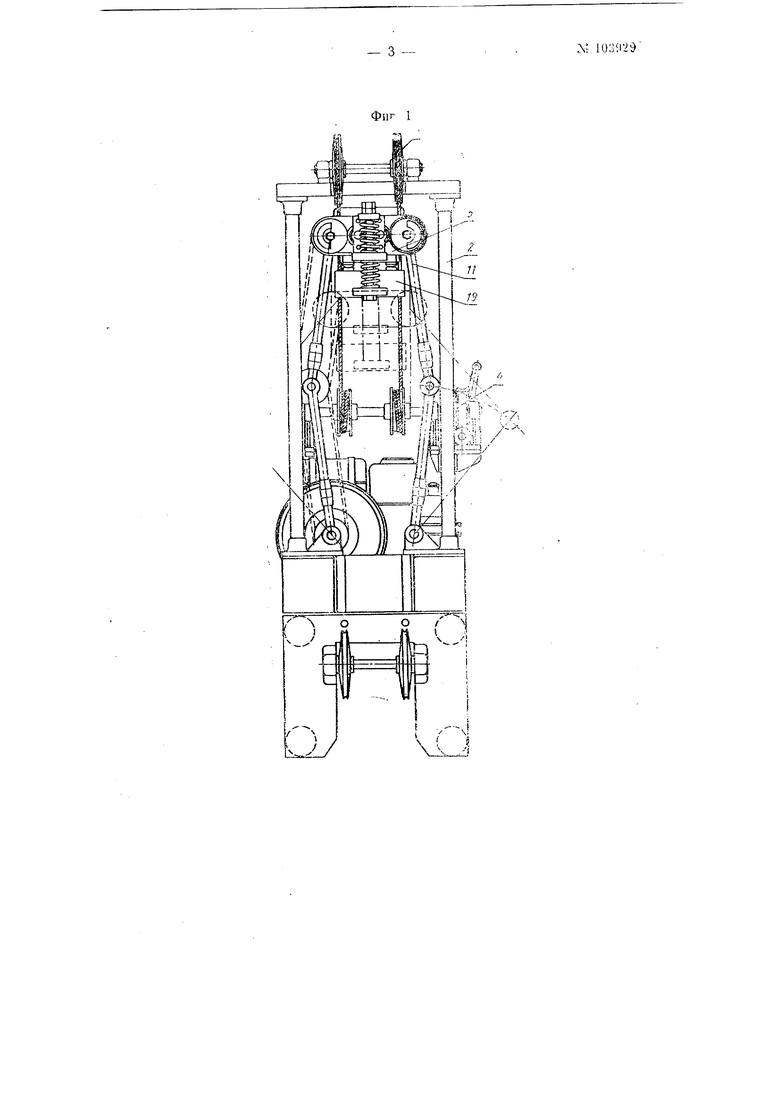
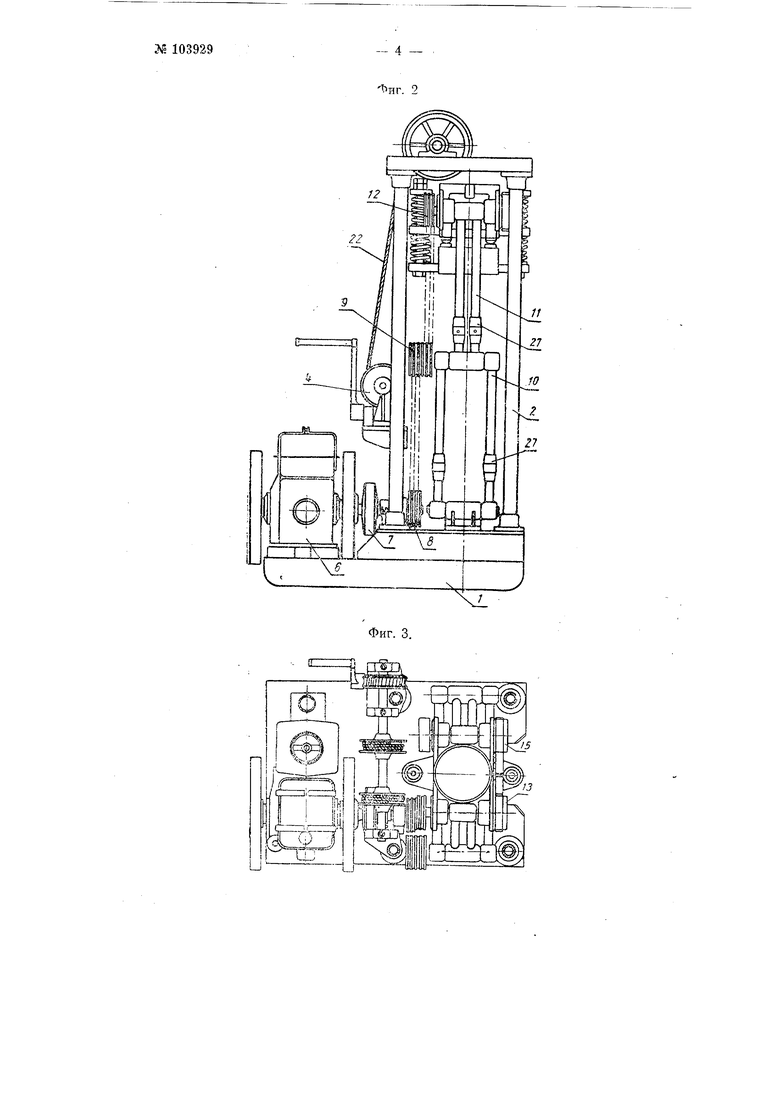
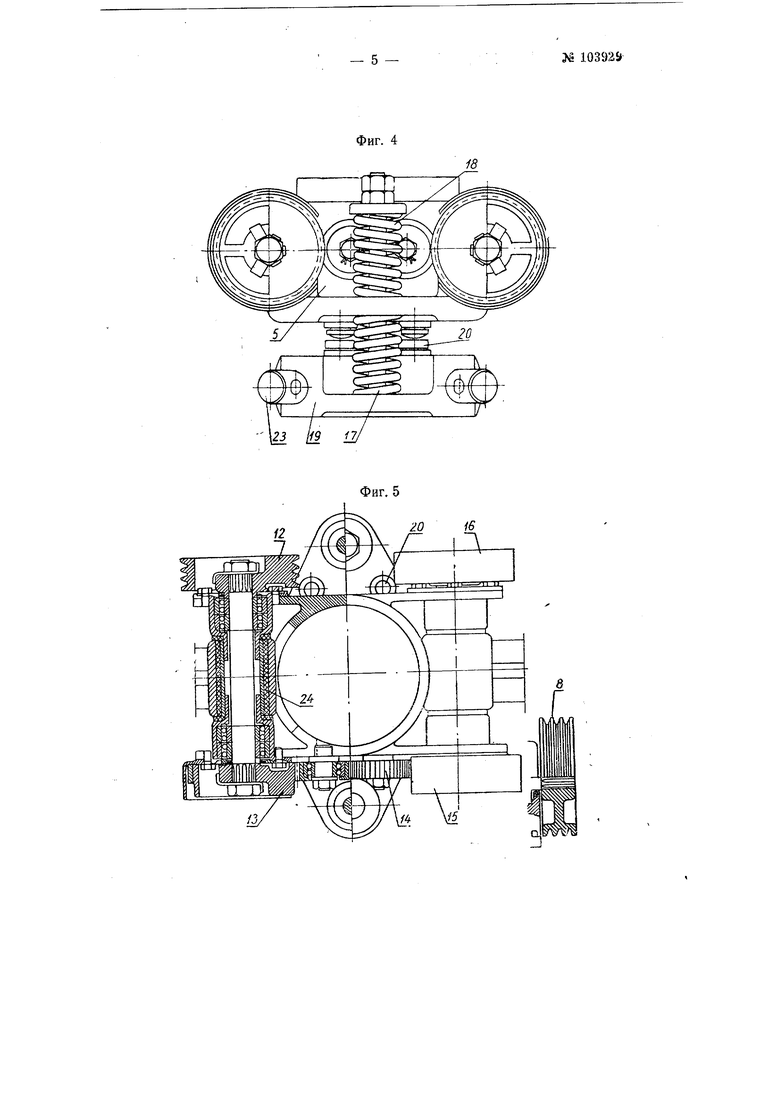
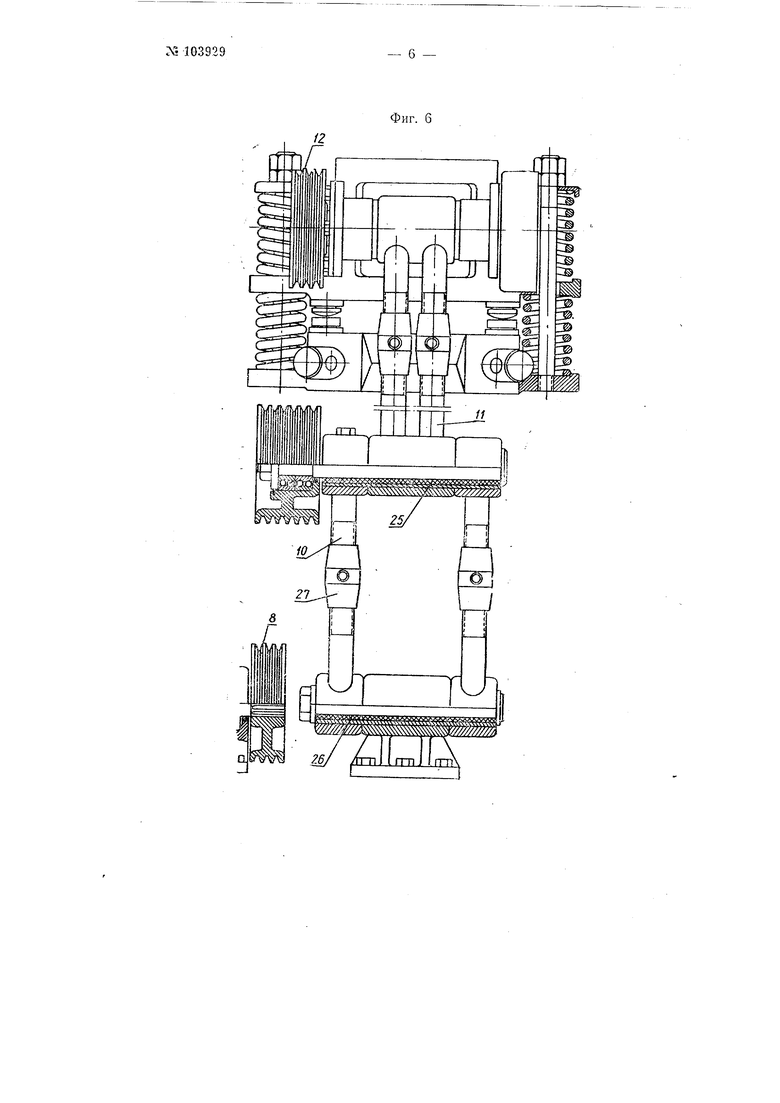
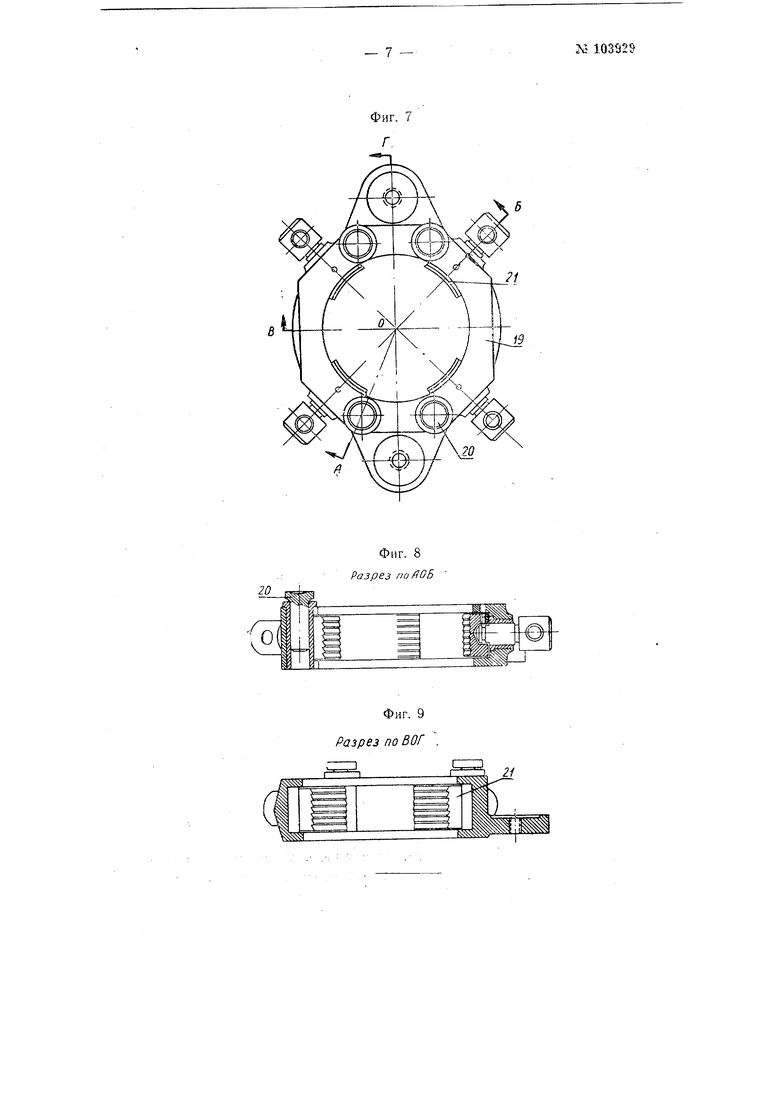
На фиг. 1, 2 п 3 изображен виброиогружатель с изолированным приводом в 8 нроекциях; на фпг. 4, и 6 - вибро1 еханизм погружателя в 3 проекциях; на фиг. 7 - вид сверху плиты-наковальни; на фиг. 8 - вид л о ЛОБ фиг. 7; на фиг. 9 - вид по БОГ фиг. 7.
Вибропогружател) состоит из сварной рамы с полозами (1), на хадторой установлена трубчатая ферма (2), с двумя роликами (3) и лебедкой (4) для спуска и подъема виброударното мехатшзма (5) в процессе работы. Двигатель (6) установлен на раме машины.
Через муфту сцепления (7) вращение передается на шкив (8), от которого посредством клиноременной передачи получает вращение сдвоенный шкив (9), с,1гоптированный па 1парикоггодшпнпиках
на палу среднего шарнира стерл;ня (10) и (11). Дальше передача идет на ШЕИВдебаланс (12), смонтированный в корпусе виброударпого механизма. Шкив-дебалапс (12) передает вращение шестернедебалапсу (13), укрепленной на общем валу со шкивом (12). Через две паразиФ ный шестерип (14) вращение передается 1иестер}1е-дебалансу (15) и затем - дебалансу (16).
Таким образом, дебалансы (12), (13), (15), (16) приобретают синхронное враи eыиe с одинаковым числом оборотов, независимое от натяжения ре5шей, направленное попарно в разные стороны н вызывающее силы вибрации. Корпус виброудар 1)го }.гсхаш1зма имеет с каждой стороны опоры с двумя пружинами (17) и (18) и стержнями, закрепленными в плпте-нааов.лше (19).
В тот jJOMCKT, когда центр всех дебалансов находится в верхне- иологкеппи, кпбромасса-корпус отрывается от плптн (19), c ;i:Ma;i верхпюю пружину (18).
Перемезцекие центров тяжести дебаланCHJJ в нижнее поло;кение п потенциал сж. ранее пружин (18) вызывают явление удара шоромассы texaнпзмa (о) по ударникам (20) плиты (19). Плита (19)
нлашками (21), снабжена заж,имньпш конфигурация которых соответствует сеобъекта (трубы. чению погружаемого пЕнунта и т. д.), и потому удар, передаваемы; ; закрепленному в плашках объекту, вызывает его иогрул:ение в грунт на некоторую :лрл;;чнку.
приближение, виброударного механизма к поверхности погружения вместе с погружаемым объектом не нарушают действия клиноременной передачи, так как лежосевые расстояния шкивов благодаря жесткосги стержней (10) и (11) -остаются пеизменпыми. Сокращается лишь величина противоположных углов четырехзвенника. Следует отметить, что погружаемый объект выполняет роль направляющего стержня, препятствующего отклонению виброударного мехапизма от прямолинейпого поступательного движепия вверх или вниз.
Перед включением ВЕброударного мехапизма в работу на погрулсепие тросы (22) лебедки (4) ослабляются и не препятствуют движению вниз. По мере погружения объекта и соответственного приближения Биброударного механизма к раме машины действие его прекращают, освобождают зажимы (23) крепления объекта и перемещают лебедкой виброударный механизм вверх. Произведя крснлсние объекта в новом месте, цикл погружения повторяют. Шарниры стержней (10) и (11) снабжены резиновыми втулками (24), (25), (26), конструктивно исключающими контакт металлических элементов, что дает возмо:кность в значительной мере погаситга воздействие вибрации на раму машины.
Для извлечения объекта нз грунта виброударный механиз устанавливается так. чтобы плита-иаковальня (19) находилас;. над вибромассой. Тогда закреиленпый зажимами объект нолучает удары, направленные снизу вверх, так как действие возмущающих сил на вибромассу не лависит от ее положения относительно плиты-наковальни.
По мере извлечения объекта и соответственного подъема виброударного механизма до верхней площадки фермы действие машины прекращают, выключая муфту сцепления; объект освобол{дают от зажимов в плите (19), виброударный механизм опускают на раму машины, где Н110ИЗВОДЯТ новое крепление об7)екта. Поиле этого цикл извлечения повторяется.
Следует отметить, что при извлечении объекта необходимо пользоваться лебедкой и держать тросы в постоянно натянуто. состоянии, так как вибрация освоболсдает объект от трения о грунт и объект иод действием своего веса всегда стремится к погружению. В том случае, если клиновые ремни после некоторого иериода эксткгуатации вытянулись, дефект устраняется натяжными муфтами (27), изменяющими межцентровое расстояние ремппй.
Предмет изобретения
1.Вибропогружатель с двигателем, вынесенным из зоны вибраций, подрессоренным вибратором и двухступепчатой клиноременной передачей между ними, о тл и ч а ю щ и и с я тем, что, с целью усилепия эффекта погружения путем крепления вибратора к погружаемому объекту в непосредственной близости к поверхности погружения, вибропогружатель снабжен шарнирно соединенными между собой стерлхнями, с помощью которых вибратор опирается на раму механизма.
2.Применение в устройстве по и. 1 хомута с плашками для крепления погружаемого объекта к вибратору.
-1
Ms 103929
IJJ
Ъиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровая установка | 1954 |
|
SU113889A1 |
| Вибромолот | 1990 |
|
SU1745863A1 |
| УСТАНОВКА ДЛЯ ВИБРОВДАВЛИВАНИЯ СВАЙ В ГРУНТ | 1999 |
|
RU2158803C2 |
| Устройство для погружения и извлечения свай | 1977 |
|
SU742532A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ И ИЗВЛЕЧЕНИЯ СВАЙ | 2001 |
|
RU2208090C1 |
| Поточная линия для переработки алюминиевых шлаков | 2017 |
|
RU2660432C1 |
| Буровая виброустановка | 1978 |
|
SU747974A1 |
| УСТАНОВКА ДЛЯ БЕТОНИРОВАНИЯ НАБИВНЫХ СВАЙ | 1998 |
|
RU2139978C1 |
| ИЗВЛЕКАТЕЛЬ ФУНДАМЕНТОВ ИЗ ГРУНТА | 1999 |
|
RU2170302C2 |
| ГЛУБОКОВОДНЫЙ СВАЕБОЙНЫЙ КОПЕР | 2009 |
|
RU2498016C2 |