.Изобретение относится к вычислительной технике и может быть использовано при построений цифровых специализированных устройств для определения оптимальных траекторий.
Известно специализированное цифровое устройство для решения больших сетей по фрагментам, содержащее блок моделей, внешнее запоминающее устройство, блок элементов памяти, устройство управления, причем первый выход устройства управления подключен к блоку элементов памяти, второйко входу запоминающего устройства, третий -.ко входам элементов модели сети, вторые входы элементов модели сети соединены с внешним запоминающим устройством l .
Недостатком известного устройства является рост времени решения при перестройке вычислительного процесса от фрагмента к фрагменту, которая производится вручную.
Наиболее близким техническим решением к изобретению является устройство для определения оптимальных траекторий, содержащее модель сети, внешнее запоминающее устройство, устройство управления, блок поиска
фрагментов и блок сопряжения фрагментов, к выходам которого подключены первые входы элементов модели сети, первые выходы которых соединены с первыми входами блока сопряжения фрагментов и первыми входами блока поиска фрагментов, первый выход которого соединен со вторым входом
10 блока сопряжения фрагментов, третьи выходы модели сети, соответствующие начальным и конечным граничным узлам, соединяются с устройством управления, первый выход которого динен со вторым входом модели сети, второй - со вторым входом блока поиска фрагментов 2 .
Недостаток известного устройства большие затраты времени на подготов20 ку исходных данных - определения интегральных характеристик моделей узлов, что исключает применение известного устройства в составе сложных систем управления.
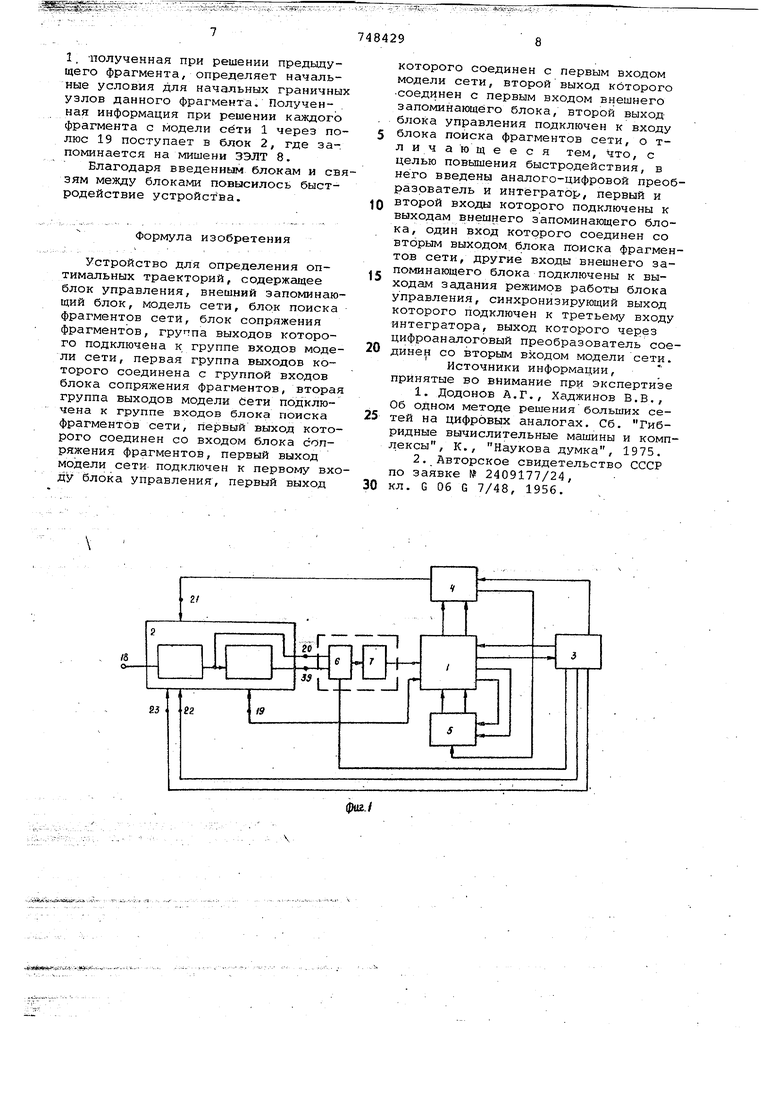
25 Цель изобретения - повышение быстродействия « Указанная цель достигает ся тем, что в устройство для определения оптимальных траекторий, содержащее блок управления, внешний запо3Q минающий блок, модель сети, блок поиска .фрагментов сети, блок сопряжения фрагментов, группа выходов которого подключаема к группе входов модели сети, первая группа выходов которого соединена с группой входов блока сопряжения фрагментов, вторая группа выходов модели сети подключена к группе входов блока поиска фрагментов сети, первый выход кото,рого соединен со входом блока сопряжения фрагментов, первый выход модели сети подключен к первому входу блока управления, первый выход которого соединен с первым входом модели сети, второй выход которого соединён с первым входом внешнего запоминающего блока, второй выход блока управления подключен к входу блока поиска фрагментов сети, введены аналого-цифровой преобразователь и интегратор, первый и второй входы которого подключены к выходам Внешнего запоминающего блока, один вход которого соединен со вторым вы; ход ом блока поиска фрагменте сё-тидругие входы внешнего запоминающего блока подключены к выходам задаНИН режимов работы блока управления синхронизирующий выход которого подключен к третьему входу интегратора выход которого через цифроаналоговый преобразователь соединен со вторым входом модели сети. На фиг. 1 приведена блок-схема устройства для определения оптимальных траекторий, на фиг. 2 - схема одного из возможных вариантов реализации внешнего запоминающего блока, на фиг. 3 - пример, иллюстрирующий работу устройства. Устройство для определения оптимальных траекторий содержит модель сети 1,внешний запоминающий блок 2, блок 3 управления, блок 4 поиска фрагментов сети, блок 5. сопряз ения фрагментов , интегратор б, анало го-цифровой преобразователь 7. , Элементами модели сети 1 являются модели узлов, которым приписываются веса, соответствующие интегральным характеристикам,.определенным по элементарным .площадкам, в центре которых находятся эти узлы, и модели ветвей, выполняющих функции пере дачи информации от узла к узлу. Топо логия соединений элементов сети соответствует графу-решетке заданной конфигурации, например, прямоугольно Для 1 оделирования весов моделей узлов используется временная аналогия Внешний запоминающий блок 2 соде жит (фиг. 2) запоминающую электрон нолучевую трубку. 8 (ЗЭЛТ) , блок 9 фо мирОвания микрорастров, включающий генераторы 10 пилообразногонапряже ния с усилителями отклонения строчн и кадровой развертки, и фокусирующу отклоняющую систему 11, усилитель 12 подсвета, видеоусилитель 13, бло 14 режимов трубки, ЗЭЛТ 15 с блоком формирования микрорастров, блоком подсвета и видеоусилителем и два цифроаналоговых преобразователя 16 и 17. Запись информации в ЗЭЛТ 8 заключается в создании потенциального рельефного поля на поверхности мишени. Величина потенциала в любой точке поля соответствует мгновенному значению входного сигнала. Запись осуществляется подачей аналоговых сигналов с канала связи через полюс 18 на усилитель 12 подсвета, при этом информация может быть записана на всю мишень или на некоторый ее участок при формировании соответствующего растра. Кроме того, на вход внешнего запоминающего блока 2 через полюс 19 могут поступать сигналы в цифровой форме, которые через цифроаналоговый преобразователь 17 подаются в усилитель 12 подсвета. Считывание информа цйи может быть как со всей мишени при формировании полного растра, та.к и с ее участка при формировании микрорастра заданного размера. Считываемый с мишени ЗЭЛТ 8 сигнал через видеоусилитель 13 поступает на: полюс 20. Для формирования Микрорастров на генераторы пилообразного .напряжения с усилителями строчной и кадровой развертки 10 с полюсов 21 и 22 через цифроаналоговый преобразователь 16 подаются сигналы, соответствующие координатам центра микрорастра и его размерам по вертикайи и горизонтали. Режимы работы внешнего запоминающего блока: стирание, запись, считывание определяются блоком 14 режимов трубки, который по сигналу с полюса 23 формирует на электродах ЗЭЛТ 8 напряжения, соответствующие для данного режима.Устройство работает следующил образом. Режимы работы внешнего запоминающего блока 2: стирание, записи и считывания информации определяет блок 3 управления подачей соответствующего потенциала на полюс 23, по которому на электродах ЗЭЛТ 8 устанавливается -напряжение, необходимое для данного режима (фиг. 1). В режиме записи информация о внешней среде О (фиг. 3) в виде стандартного телевизионного сигнала через полюс 18 (фиг. 2) поступает .во внешний запоминающий блок 2, где запоминается на мишени ЗЭЛТ 8. Определение оптимальных траекторий предполагает описание среды (фиг. 3) в виде сети, в которой узлам сети, например, 24-39 ставйтся в соответствие количественное опис.ание параметров фрагментов среды, V , в центре которых находятся узлы сети. Для получения количественных характеристик используется особенность ЗЭЛТ - воз.можность 2
формирования микрорастра, размер и конфигурация которого соответствует размеру и конфигурации фрагмента, с последующим интегрированием считываемого сигнала по данному фрагменту. Для формирования микрорастра V необходимо задать его масштаб; размеры по вертикали и горизонтали, а также координаты центра микрорастра. Блок 3 управления (фиг. 1) передает во внешний запоминающий блок 2 через полюс 22 масштаб микрорастра, постоянный на все время решения задачи, а блок 4 через полюс 21 координаты центра микрорастра по вертикали и горизонтали. Считываемый сигнал с мишени ЗЭЛТ 8 через полюс 20 подается в интегратор 6, где производится интегрирование по данному |микрорастру за время считывания одного кадра, а с помощью преобразователя 7 - преобразование в цифровой код и передача в модель сети. В модели сети 1 эта информация записывается в модель узла, адрес которого соответствует координатам центра микрорастра, например, в узел 24 (фиг.3 Блок 3 управления (фиг. 1) вырабатывает новое требование в блок 4, где определяется следующий адрес, по которому осуществляется смещение микрорастра, например, в полол ение 25 (фиг. 3), интегрирование информации по выбранному фрагменту, преобразование полученной информации в цифровой код и передача в модель узла модели сети 1, определяемый выбранным адресом.
Таким образом, при вводе информации во внешней среде образуется цикл состоящий из последовательности считываемых микрорастров и записи полученной информации в модель сети 1. Определение оптимальной траектории на модели сети 1 производится следующим образом.
Определяется начальный и конечный узлы в модели дети, например, 24, 31 (фиг. 3), блоком 3 управления (фиг. 1) посылается пусковой импульс в начальный узел и определяется оптимальный путь между данными узлами. Модели узлов, принадлежащие полученному пути 24, 28, 33, 34, 31 (фиг. 3) определяют конфигурацию оптимальной траектории во внешней среде.
При таком Анализе внешней среды определяется грубое решение. Для получения более точного решения анализируется зона внешней среды, состоящая из последовательности фрагментов, определяемых адресами моделей узлов модели сети 1, принадлежащих кратчайшему пути 24, 28, 33, 34, 31 (фиг. 3). Для этого в блоке 4 поиска фрагментов сети (фиг. 1) запоминаются адреса этих моделей узлов и
. налравление выхода кратчайшего пути яз -злов, принадлежащих этому -пути.
Блоком управления посылается требование в блок 4 поиска фрагментов на передачу полученных адресов во внешний запбминающий блок 2, по которым последовательно по каждому адресу формируется микрорастр и перезаписывается на мишень ЗЗЛТ 15. В результате перезаписй каждый фраг- мент внешней среды V; (фиг. 3), соoответствующий микрорастру , увеличивается в К раз, кратное числу микрорастров, считываемых, с мишени ЗЭЛТ 8. Далее Ьсуществляется ввОд информации в модель сети 1 с т рубки 15 аналогия:
5 но вводу информации с перовой ЗЭЛТ 8. При этом каждому адресу модели узла на мишени ЗЭЛТ 8 формируется микрорастр, координаты центра которого подаются через полюс 21 с блокад 4 поис0ка фрагментов сети, а тласштаб - через полюс 22 - с блоком 3 управления. При сохранении размеров модели сети масштаб микрорастра не изменяется. Считываемый по данному микрорастру сигнал
5 с мишени ЗЭЛТ 15 через полюс 40 поступает на интегратор 6 и после HHTetрирования преобразовывается В цифровой код в прёобр1азбвателё 7 и пёрёзапиоывается в модель узла модели сети
0 1, определяемый данным адресом. Далее функционирование устройства аналогично, т.е. С)б|ра3уётся цикл, состоящий из .послёдбвателбностй считывания миКрорастррв, с мишени ЗЭЛТ 15 и записи
5 полученной информации в модель сети 1. На основании информации, полученной при грубом решений, по требованию блока 3 управления блок 4 поиска фрагментов сети определяет начальные и конечные узлы фрагмента. Блок
0
3 управления определяет на мЬдели сети дерево Оптимальных путей из начальных в конечные граничные узлы данного фрагмента. Разница путей из начальных в конечные граничные уз5лы запоминается в блоке, 5 сопряжения фрагментов. Полученная в результате решения информация из МЬдели сети 1 передается через полюс 19 в запоминающий блок. 2, где за0поминается ка мишени ЗЭЛТ 8. Блоком 3 управления посьалается новое требование в блок 4 поиска фрагментов сети на передачу полюс 21 координат следующего микрорастра
5 для перезаписи его на 1Л1шень ЗЭЛТ 15. Аналогично в модель сети 1 вводится информация о новом фрагменте внешней среды. Для определения дерева оптимальных путей на данном
0 фрагменте по требованию блока 3 управления блок 4 поиска фрагментов разрешает подключение блока 5 сопряжения фрагментов к модели сети 1. ИнформацияО разности путей в ко5
.нечные граничные узлы модели сети
1, полученная при решении предьщущего фрагмента, определяет начальные условия для начальных граничных узлов данного фрагмента. Получен- . ная информация при решении каждого фрагмента с модели сети 1 через полюс 19 поступает в блок 2, где запоминается на мишени ЗЭЛТ 8.
Благодаря введенным блокам и связям между блоками повысилось быстродействие устройства.
Формула изобретения
Устройство для определения оптимальных траекторий, содержащее блок управления, внешний запоминающий блок, модель сети, блок поиска фрагментов сети, блок сопряжения фрагментов, группа выходов которого подключена к группе входов модели сети, первая группа выходов которого соединена с группой входов блока сопряжения фрагментов, вторая группа выходов модели сети под ключена к группе входов блока поиска фрагментов сети, первый выход которого соединен со входом блока сопряжения фрагментов, первый выход модели сети подключен к первому входу блока управления, первый выход
которого соединен с первым входом модели сети, второй выход которого соединен с первым входом внешнего запоминающего блока, второй выходблока управления подключен к входу 5 блока поиска фрагментов сети, о тличающееся тем, ч:то, с целью повышения быстродействия, в него введены аналого-цифровой преобразователь и интегратор, первый и второй входы которого подключены к выходам внешнего запоминающего блока, один вход которого соединен со вторым выходом.блока поиска фрагментов сети, другие входы внешнего за, поминающего блока подключены к выходам задания режимов работы блока управления, синхронизирующий выход которого подключен к третьему входу интегратора, выход которого цифроаналоговый преобразователь соединен со вторым входом модели сети.
Источники информации, принятые во внимание при экспертизе
1.Додонов А.Г., Хаджинов В.В,, Об одногч1 методе решения больших сетей на цифровых аналогах. Сб. Гибридные вычислительные машины и комплексы, К., Наукова думка, 1975.
2.Авторское свидетельство СССР по заявке № 2409177/24,
кл. G Об G 7/48, 1956.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для анализа больших регулярных сетей | 1978 |
|
SU790000A1 |
| Устройство для расчета больших сетей | 1976 |
|
SU717790A1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| УСТРОЙСТВО ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1973 |
|
SU368629A1 |
| Устройство для отображения информации на экране элт | 1978 |
|
SU748464A1 |
| Устройство для моделирования сетевых графиков | 1977 |
|
SU708367A1 |
| Цифровая машина для управления процессами электринно-лучевой микрообработки | 1975 |
|
SU600562A1 |
| Вероятностное устройство для решения конечно-разностных уравнений | 1972 |
|
SU477418A1 |
| Устройство для отображения символов на экране электронно-лучевой трубки | 1977 |
|
SU691899A1 |
| Вычислительное устройство для решения задач сетевого планирования | 1978 |
|
SU750503A1 |

ei& - f- -- ---;: -:f:---- --- ---
