1
Изобретение относится к вычислительной технике и может быть использовано для автоматизированного управления процессами производства интегральных схем на основе элионной технологии.
Известна цифровая машина для управления процессами электронно-лучевой микрообработки, содержащая устройство управления, блок трансмиттера, запоминающее устройство, блок управления, буферное запоминающее устройство, блок выполнения операций, подключенный к кодовой шине и к шинам управляющих сигналов, блок управления координатным столом, соединенный с блоком выполнения операций, входами и выходами машины, блок совмещения осей координат, подключенный к кодовой шине, к блоку выполнения операций, к выходам машины, блок отклонения, блок угловых преобразований, изображений, подключенный к кодовой шине и к выходу блока совмещения осей коордипат и входу блока отклонения
1.
Эта машина позволяет воспроизводить рисунки сложных интегральных схем.
Прототипом изобретения является цифровая машина для управления процессами электронно-лучевой микрообработки, содержащая блок трансмиттера, запоминающее устройство, блок управления, буферное запоминающее устройство, вычислительный блок, подключенные к кодовой шине и к шинам управляющих сигналов, блок связи с объектом управления, вход и выход которого соединены соответствеппо с выходом и входом вычислительного блока, вход и выход мащины подключены к соответствующим входу и выходу блока связи с объектом управления.
В состав блока связи с объектом управления входят устройства коррекции, управления приводами координатного стола, отклонения электронного луча 2.
С помощью этой машины осуществляется управление электронно-лучевой установкой в
части программного перемещепия электронного луча по подложке (при этом осуществляется как шаговый, так и режим сканирования по строкам микрорастра) и координатного стола, па котором эта подложка устаповлена, а также формпрование технологических режимов обработки с целью изготовления на основе элионных технологических процессов фотошаблонов или непосредственно компонептов интегральных микросхем.
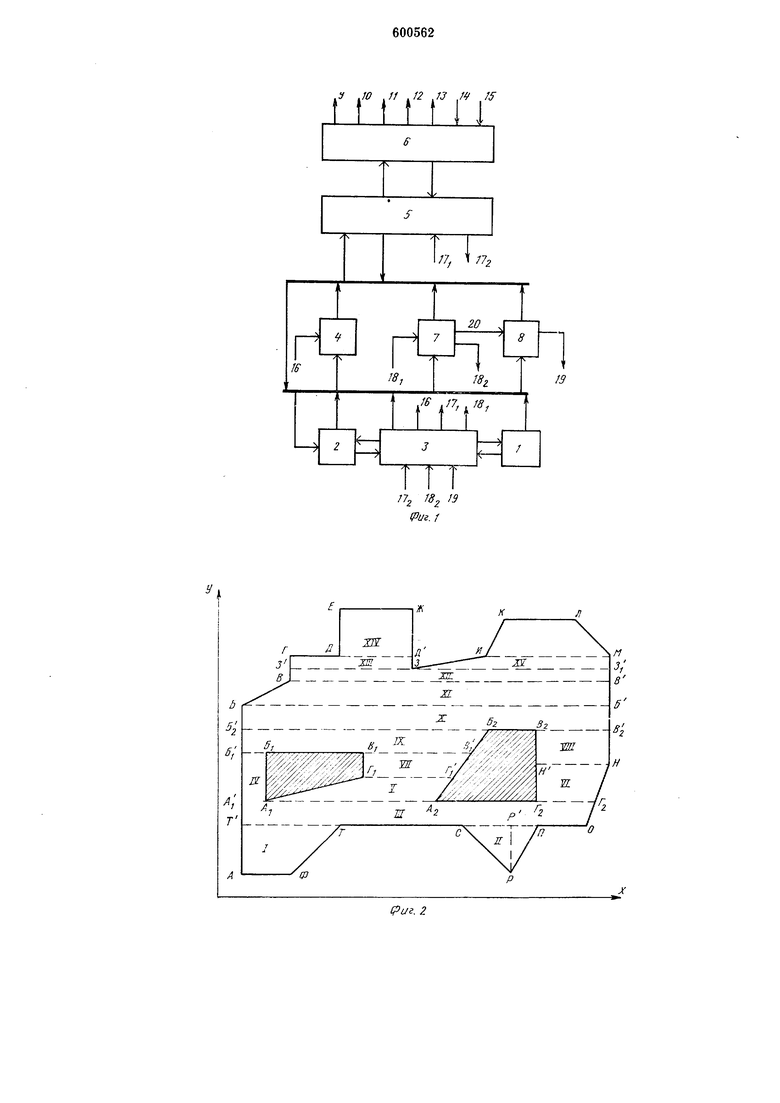
Подготовка управляющей информации для машины заключается в разбиении топологпп фотошаблона на базовые геометрические фигуры, воспроизводимые машиной, и представлении информации, описывающей эти фигуры, на языке машины. Подготовка информаЦии в таком виде на этапе изучения элионных технологических методов создавала оиределенные удобства для технолога-оператора, поскольку программировались довольно простые технологические задачи, а основное внимание уделялось обеспечению максимальной простоты общения оператора с машиной при исследовании электронно-лучевых процессов. Подготовка управляюш,ей информации на уровне базовых фигур для воспроизведения сложных геометрических рисунков, какими являются топологические структуры больших интегральных схем, содержащие несколько тысяч угловых точек контуров, является трудоемким процессом. Необходимость в использовании дорогостоящих универсальных вычислительных машии затрудняет оперативное изготовление фотошаблонов и увеличивает стоимость микросхем. Кроме того, увеличение объема входной информации приводит к удлинению программоносителя (наиример, перфоленты) и, как правило, к снижению надежности системы управления, для хранения же информации требуется значительный объем памяти машины. Отсутствует возмол ность оперировать с информацией, представленной в свернутом виде, например массивом данных о топологии в виде координат точек изломов (угловых точек) контуров. Целью изобретения является повышение эффективности работы путем уменьшения трудоемкости процесса подготовки программы и сокращеийя объема памяти для хранения данных. Для этого в машину введены блок определения угловых координат фрагментов топологической структуры, подключенный соответствующими входами и выходами к блоку управления и к кодовой шине, и блок определения координат опорных точек и вида базовых фигур, соединенный входами с выходом блока определения угловых координат фрагментов топологической структурь и с кодовой шиной, а выходами подключенный к соответствующему входу блока управления и к кодовой шине. На фиг. 1 приведена структурная схема машины; на фиг. 2 - фрагмент т-опологической структуры; на фиг. 3 и 4 - диаграммы, поясняющие выполнение разбиения и выделение элементарных фигур. Машина содержит блокЛ траисмиттера для ввода программ с перфоленты; заиоминающее устройство 2 для хранения программы; блок 3 уиравления, осуществляющий распределение информации и взаимодействие блоков машины; буферное запоминающее устройство 4 для хранения текущей информации; вычислительный блок 5, выполняющий функции управления электронно-лучевой установкой в части формирования технологических режимов обработки, вычисления приращений координат точек траектории с выиолнением необходимых геометрических преобразований (поворот изображений, перенос начала координат, зеркальное отображение, изменение масштаба), управление приводами координатного стола, а также осуществляющий привязку местоположения луча к маркерным знакам с целью компенсации угловой погрешности или погрешности установки начала координат и масштаба изображения; блок 6 связи с объектом управления, иреобразующий цифровые значения управляющих величин в пропорциональные регулирующие воздействия; блок 7 определения угловых координат фрагментов топологической структуры и блок 8 определения координат опорных точек и вида базовых фигур. Позициями 9-ь-20 обозначены связи. Блок 3 имеет двусторонние связи для обмена управляющей информацией с блоком 1 трансмиттера и запоминающим устройством 2, а также с вычислительным блоком 5 - по шинам 17 и блоком 7 - по шинам 18. При обращении к буферному запоминающему устройству блок 3 вырабатывает сигналы на шине 16. По шине 19 в блок 3 поступают сигналы в процессе преобразования топологической структуры, под воздействием которых блокЗ осуществляет распределепие информации в памяти машины. Шины 9-13 предназначены Для передачи регулирующих воздействий: к шине 9 подключается отклоняющая система электронно-лучевой установки; шина 10 бланкирующих сигналов - для модуляции тока луча; шины 11 и 12 управления величиной тока луча и ускоряющим напряжением; шина 13 управления приводами координатного стола. По шинам 14 и 15 в блок 6 поступают сигналы от датчиков истинного положения координатного стола и маркерных знаков соответственно. Обмен числовой информацией между блоками машины осуществляется по кодовой шине. Программа работы машины вводится с перфоленты в запоминающее устройство 2. Исходными данными является описание топологической структуры, представленное координатами угловых точек контура. Если фигура содержит внутренние контуры, образуюЩие окна в ней, например, контуры AiBiBiFiAi и А2Б2В2Г2А2 (см. фиг. 2), то в ее описании указывается соответствующий признак, а описания этих контуров приводятся отдельно. Кроме того, при описании фигуры выделяются точки, образующие впадины в контуре в направлении убывания ординаты (для рассматриваемого случая точка 3 на фиг. 2). Перед проведением процесса электронполучевого экспонирования осуществляется разбиение фигуры иа фрагменты и выделение из них базовых фигур, выполняемое совместной работой блоков 7 и 8. Сущность разбиения заключается в сече фигуры, ограниченной контуром, прямьь
ми, проходящими через угловые точки контура параллельно одной из ортогональных осей. В дальнейшем будем рассматривать сечение фигуры прямыми, нараллельными оси абсцисс.
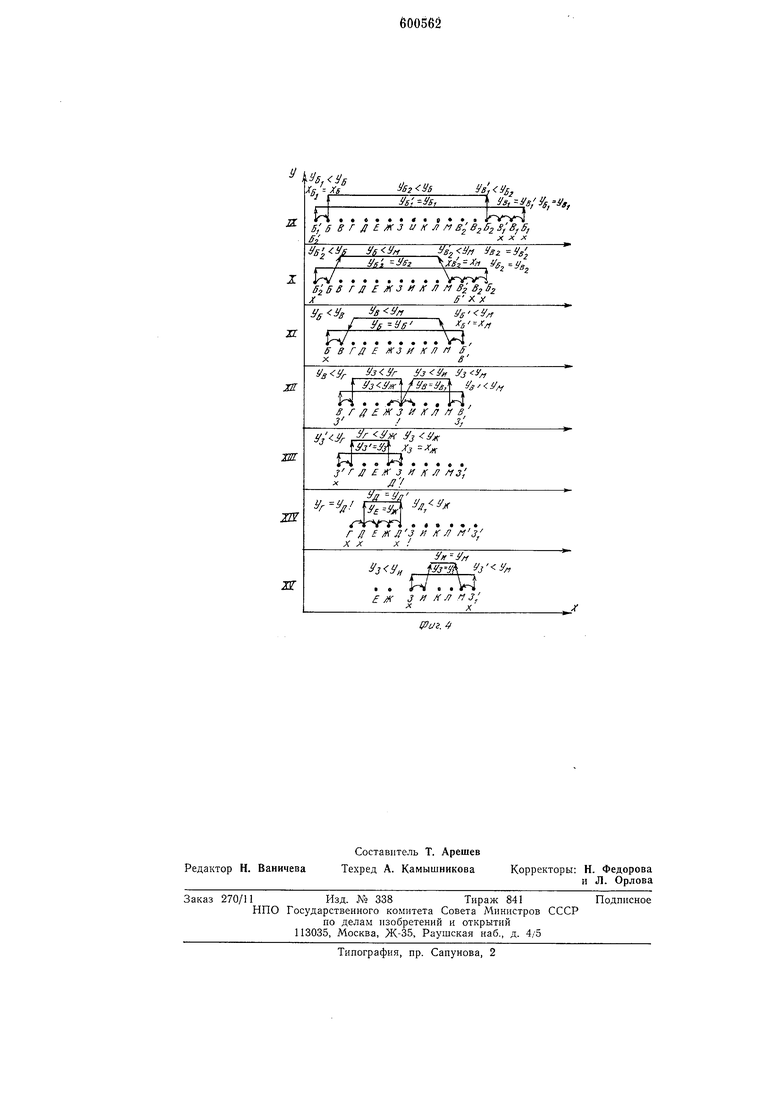
Пример такого разбиения показан на фиг. 2 и поясняется диаграммой на фиг. 3 и 4. Для выполнения этих преобразований из запоминающего устройства 2 в буферное запоминающее устройство 4 иод воздействием сигналов, формируемых блоком 3, заносятся координаты особых точек, которыми являются, например, точки впадин контура и точки виутренних контуров, имеющие минимальные значения ординат. Кроме того, в блок 7 под воздействием сигналов на щине 18i заносятся координаты опорной точки, в качестве которой автоматически выбирается точка контура, имеющая минимальные значения ординаты УМИН. Если таких точек несколько, то выбирается та, которая имеет также и минимальное значение абсциссы, например точка А (см. фиг. 2).
Далее из блока 2 в блок 7 заносятся координаты точек, соседних с опорной, и в результате попарного сравнения координат взаимосвязанных точек определяются координаты изломов контура, в которых проводится сечение фигуры.
Так, в рассматриваемом случае, определяется, что АФ является основанием четырехугольника, поскольку значение УФ равно значению Уд и других точек на отрезке АФ не имеется. Поскольку УФ меньше Ут и, кроме того, УТ меньше У в , то через точку Т должна проводиться секущая. Недостающая угловая точка Т четырехугольника АФТТ определяется в результате присвоения ей ординаты точки Т и абсциссы точки А, поскольку ХА равно ХБ, т. е. нрямая АБ параллельна оси ординат. В общем случае абсцисса недостающей точки определяется из выражения:
У У , ()(УТ-УА)
Х-,, А + --i- .
Таким образом, от фигуры отсекается четырехугольник, координаты угловых точек которого по кодовой дугагистрали передаются в блок 8 под воздействием сигналов на шине 20. Кроме того, координаты точки Т заносятся в запоминающее устройство 2 в описание контура, а координаты точек А и Ф из описания удаляются, т. е. в дальнейшем операции проводятся над фигурой без отсеченной части. После этого в блок 7 заносятся значения координат новой опорной точки с УМПГЬ например точки Р, и аналогично проводится отсечение следующей фигуры.
Поскольку при удалении из описания координат точек отсеченных фигур может нарущиться связанность остающихся точек, то для исключения этого координаты образовавшихся изолированных точек перемещаются в пределах информационного поля памяти, занимая освободившиеся места. Так, в рассматриваемом случае вместо точки А помещается описание вновь образованной точки Т , точка Ф была последней в описании массива, и ее удаление не нарушает условия связности, а описания точек С и Т перемещаются на одну позицию каждая для заполнения вакансии на месте точки Р (позиции I и П на фиг. 3).
Аналогично включаются в описание внешнего контура точки внутренних контуров, которые попадают в поле сечения. Этот процесс иллюстрируется позициями 1П и IV на днаграмме фиг. 3. Благодаря тому, что координаты особых точек, которые могут повлиять на процесс разбиения фигуры, находятся в
буферном запоминающем устройстве 4, исключаются непроизводительные потери времени, связанные с анализом на каждом шаге разбиения всех точек контура для выявления особых.
Процесс разбиения фигуры на фрагменты завершается, когда в описании исходного односвязанного контура или нескольких несвязанных контуров, образовавшихся в результате сечения фигуры в особых точках
(позиции ХП-XV иа фиг. 4), остается не более двух связанных точек. Так, в рассматриваемом случае в описании фигуры остаются точки Е и Ж в результате разбиения контура ЗТДЕЖЗИ и точки К и Л, принадлежащие контуру ЗИКЛМЗь Сигнал об окончании разбиения по шине ISo поступает в блок 3 для индикации оператору.
Дальнейшее преобразование полученных фрагментов с учетом ограничений по размеру
поля отклонения и набору базовых фигур осуществляется блоком 8. Последовательиым перебором фигур и сравнением координат их углов с координатами ограничивающих линий исходная фигура разбивается на фрагменты,
которые могут быть размеш,ены в пределах единичного поля отклонения. Поскольку в каждом поле отклонения отсчет координат ведется от своего нулевого значения, то всем угловым точкам фигур, за пределами первого поля отклонения, ирисваиваются новые значения координат с учетом их первоначальной величины и номера поля отклонения, в котором та или иная фигура размешается.
Далее ироводится анализ фигур в пределах каждого поля отклонения, в результате чего определяются фигуры, которые не входят в число базовых, воспроизводимых по одной команде. Например, треугольник РСП (см.
фиг. 2) не является ни равнобедренным, ни ПРЯМОУГОЛЬНЫМ и ПОЭТОМУ разбивается на два прямоугольных треугольника, которые уже являются базовыми фигурами. Аналогичные операции выполняются иад неравнобочнылти
и непрямоугольными трапециями. Координаты опорных точек базовых фигур по кодовой магистрали под воздействием сигналов на шине 19 заносятся в запоминающее устройство 2. Одновременно формируется признак
ида фигуры (треугольник, трапеция и т. д.),
являющийся командой на выполнение процедуры построения ее. После записи в блок 2 команд на воспроизведение всех фигур в пределах одного поля отклонения формируется команда перемещения координатного стола на величину, равную размеру поля отклонения, после чего аналогичные операции выполняются над фигурами очередного поля отклонения. В результате этого в запоминающем устройстве 2 накапливается программа воспроизведения структ фы на заготовке фотошаблона. В соответствии с этой программой блок 5 выполняет построение фигур в заданной последовательности, управляя перемещением электронного луча п координатного стола путем воздействия на электронно-лучевую установку управляющих сигналов, формируемых блоком 6 на шинах 9-13. Обмен управляющей информацией между блоками 5 и 3 осуществляется по шинам 17i и ITg.
Поскольку вся информация, необходимая для воспроизведения данной фигуры, находится 13 буферном запоминающем устройстве 4, п в ходе ее построения не происходит обращения к запоминающему устройству 2, процессы обработки подложки и подготовки программы д.ля следующего поля отклонения совмещаются во времени, что является полезным с точки зрения повыщения производительности.
Процесс подготовки рабочей программы завершается, когда в запоминающее устройство 2 будет передано описанпе последней базовой фигуры. При этом на щпне 9 формируется соответствующий сигнал, и в блоке 3 фиксируется конечный адрес программы, хранящейся в запоминающем устройстве 2. По достижении в ходе обработки подложки этого адреса на шине 172 вырабатывается сигнал окончания программы, которым блокируются все каналы управления электроннолучевой установкой; одновременно блок 3 запускает трансмиттер 1 для ввода очередной информации либо в случае его неготовности осуществляет останов машины, информируя об этом оператора.
Введение в состав мащины блоков определения угловых координат фрагментов топологической структуры, определения координат опорных точек и вида базовых фигур позволяет оперировать с входным языком более высокого уровня, что приводит к снижению трудоемкости процесса подготовки рабочей программы, и, как следствие,- к повышению эффективности машины.
Изложенное выше можно проиллюстрировать следующим примером. Для подготовки
программы топологического рисунка, показанного на фиг. 2, для известной машины необходимо проанализировать размеры и положение в пространстве 16-ти базовых фигур, что в наиболее оптимальном случае может быть удовлетворено заданием не менее 50-ти точек, в то время как в рассматриваемой машине это описание ограничено указанием 27-ми точек. Если учесть то обстоятельство, что неравнобедренные трапеции и треугольники увеличивают количество базовых фигур для известной машины, то можно утверждать, что эта разница в количестве задаваемых точек возрастает еще более.
Реализацию введенных блоков можно осуществить с помощью интегральных микропроцессоров, при этом разрабатывается соответствующее матобеспечение, создаваемое на основе односторонней машииной памяти и
0 микропрограммирования.
Формула изобретения
Цифровая машина для управления процессами электронно-лучевой микрообработки, со5 держащая блок трансмиттера, запоминающее устройство, блок управления, буферное запоминающее устройство, вычислительный блок, подключенные к кодовой шине и к шинам управляющих сигналов, блок связи с объек0 том зшравления, вход и выход которого соединены соответственно с выходом и входом вычислительного блока, вход и выход машины подключены к соответствующим входу и выходу блока связи с объектом зправления, 5 отличающаяся тем, что, с целью повыщения эффективности работы путем уменьщения трудоемкости процесса подготовки программы и сокращения объема памяти для хранения данных, в нее введены блок опреде0 ления угловых координат фрагментов топологической структ фы, подключенный соответствующими входами и выходами к блоку управления и к кодовой щине, и блок определения координат опорных точек и вида базовых 45 фигур, соединенный входами с выходом блока определения угловых координат фрагментов топологической структуры и с кодовой шиной, а выходами подключенный к соответствующему входу блока управления и к кодо50 вой шине.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №477417 кл. G 06F 15/20, 1974.
55 2. Заявка № 2074514/24, кл. G 06F 15/20, 1974, по которой принято решение о выдаче авторского свидетельства.
ГГГГГГ.Г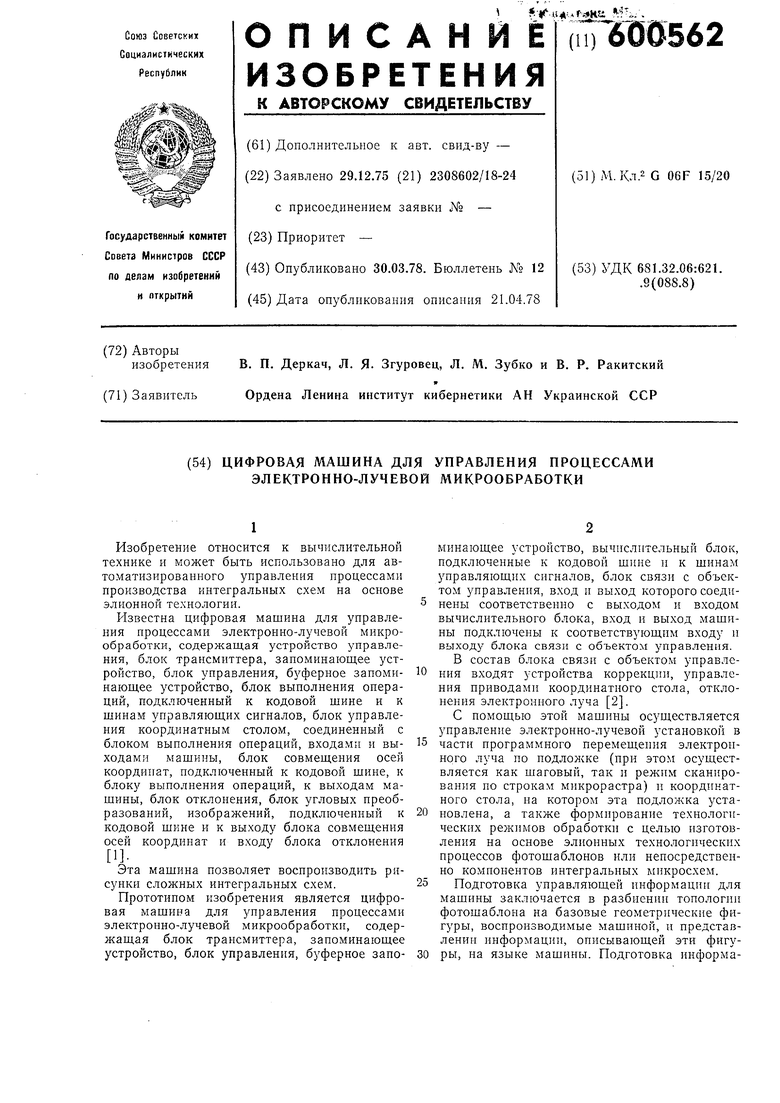



| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая машина для управления процессами электронноголучевой микрообработки | 1974 |
|
SU511594A1 |
| Цифровая машина для управления процессами электроннолучевой микрообработки | 1976 |
|
SU635489A2 |
| Устройство подготовки данных для машин управления процессами электронно-лучевой микрообработки | 1983 |
|
SU1154257A1 |
| Цифровая машина для управления процессами электронно-лучевой микрообработки | 1977 |
|
SU702378A1 |
| Цифровая машина для управления процессами электроннолучевой микрообработки | 1974 |
|
SU477417A1 |
| Цифровая машина для управления процессами электронно-лучевой микрообработки | 1974 |
|
SU608163A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ И ОПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1973 |
|
SU368626A1 |
| СПОСОБ ФОРМИРОВАНИЯ ДАННЫХ КОНТУРА ШАБЛОНА | 1991 |
|
RU2101763C1 |
| СИСТЕМА МГНОВЕННОГО КОМПЬЮТЕРНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ И СПОСОБ РАСПОЗНАВАНИЯ | 2004 |
|
RU2308081C2 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |

П, 772
20 у
К
9
/,
/
ттт
П J8 9
2 8, IPUi.l
