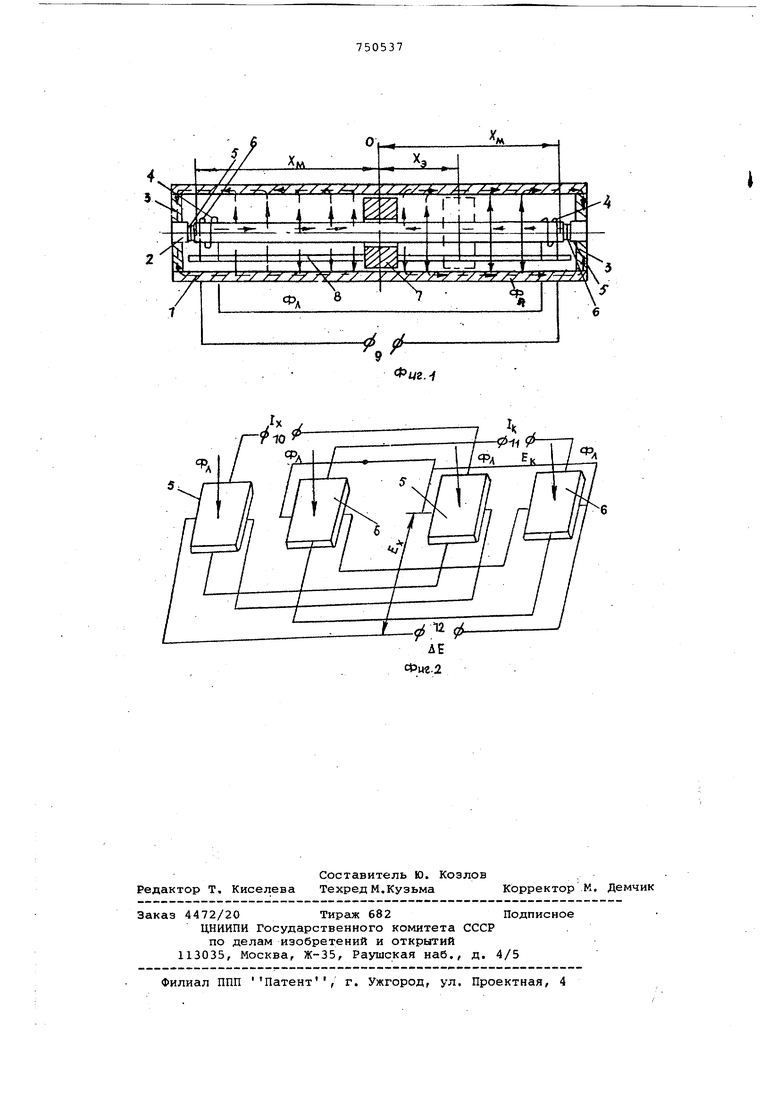
сигналов в перемещение, содержащий магнитопровод, двухсекционную обмотку возбуждения, элементы Холла и подвижную короткозамкнутую экранирую щую шайбу, содержит ферромагнитный стержень, концы закреплены ферромагнитными дисками в торцах магнитопровода, который выполнен в виде полого цилиндра с прорезью вдоль образующей, внутри цилиндра коаксиально с ферромагнитным стержнем расположена подвижная короткозамкнутая экранирующая шайба, а секции обмотки возбуждения, соединенные последовательно-встречно и связанные с питающим входом преобра зователя, расположены на концах фер ромагнитного стержня, которые выпол нены с поперечными зазорами, в кгикдом из которых расположены рабочий и компенсирующий элементы Холла, токовые выводы рабочих, а также токовые выводы компенсирующих элементов Холла соединены последовател .но-согласно и связаны с соответству щими сигнальными входами преобразователя, потенциальные выводы элементов Холла включены последовательно-согласно, а потенциальные выводы компенсационных - последовательно-встречно, причем потенциальные выводы рабочих и компенсирующих элементов Холла соединены в дифференциальную цепь, выводы котор являются управляющим выходом преобр зователя. На фиг. 1 представлена конструкц преобразователя электрических сигна в перемещение; на фиг. 2 - схема соединений элементов Холла. Устройство содержит магнитопровод 1, выполненный в виде полого ци линдра, ферромагнитный стержень 2, концы которого закреплены ферромагнитными дисками 3 в торцах магнито. провода 1, двухсекционная обмотка . 4 возбуждения, рабочие ь и компенсирующие 6 элементы Холла, подвижна короткозамкнутая экранирующая шайба 7,. связанная через прорезь 8 с управляемым двигателем (на фиг. 1 н показан), питающий вход 9 преобразо вателя, сигнальное входы 10 и 11, управляющий выход 12 преобразователя . 111реобразователь работает следующим образом... При подключении питания обмотка возбуждения создает в магнитопроводе два встречно направленных магнит ннх потока Фд и Фf, разделяемых по нижней шайбой 7. При прохождении ма нитных потоков через компенсирукицие элементы 6 Холла на их потенциальны выводах появляются сигналы. Элемен ты б Холла соединены последовательо-встречно и сигналы от правого левого элементов вычитаются .Ф.КЭ,(), де Е -напряжение компенсации;-постоянная Холла; -сечение магнитопровода 1 на пути магнитного потока; Ji - компенсационный ток; Фд и Фп - магнитные потоки соответственно справа и слева от подвижной экранирующей шайбы 7, создаваемые встречно включенными секциями обмотки возбуждения 4. Фгт JfaWbg А где J - ток в обмотке возбуждения 4 ; число витков в секции обмотки возбуждения 4; удельная магнитная проводимость;максимальная координата перемещения подвижной щайбы 7 из среднего - нулевого положения; текущая координата подвижной шайбы 7. Подставляя (2) и (3) в (1) получим осле преобразования: При неравенстве потоков Фд и Ф на выходе элементов 6 Холла появляетя сигнал. Он подается на обмотку управляемого двигателя (на фиг. 1 не показан), который перемещает подвижную шайбу 7 до положения, при котором А и сигнал на выходе будет равен нулю. Перераспределение магнитных потоков происходит за счет изменения длины пути магнитных потоков по магнитопроводу 1 при перемещении подвижной шайбы 7. В рассматриваемой конструкции равенство Фд Ф достигается при среднем положении шайбы 7. При появлении на токовых выводах рабочих элекрнтов. 5 Холла преобразуемого сигнала с их потенциальных выводов, соединенных последовательно согласно,снимается ЭДС Холла Е,КЭ.Ф.4КЗ,,(Ф,+Ф„), :3г где Jx - преобразуемый ток. При преобразовании постоянного тока обмотка 4 возбуждения подключается к .переменному току, а компенсационный ток - постоянный. При .пре 131Б азовании.переменно го тока обмотк 4 возбуждения подключается к постоя ному току, а компенсационный ток переменный. Подставляя значения Фд и Ф из уравнений (2) и (3) в (5) получим V2KD,. Этот сигнал поступает на управляющий выход преобразователя, связанный с двигателем, который изменя положение подвижной шайбы 7. Происходит перераспределение магнитных потоков и на выходных потенциальных выводах компенсируюших элементов 6 Холла появляет ся сигнал,, пропорциональный координате подвижной шай бы 7. Этот сигнал вычитается из Е, двигатель перемещает шайбу 7 до тех пор, пока Е не будет равен из (4) и (6) получим ,0 Ч)ткуда. Из (9) видно, что каждому значени преобразуемого тока J соответствует положение подвижной- шайбы 7. Благодаря новой совокупности конструктивных признаков разработанный преобразователь электрических сигналов в перемещение характеризует ся простотой и технологичностью конструкции, обладает высокой точностью за счет экранирования внешних полей а также за счет дифференциальности схемы, когда все внешние воздействия взаимокомпенсируются. Отсутствие эле трических контактов, незакрепленных токопроводящих проводов, а также защищенность обмоток, элементов 5 и 6 Холла и подвижной шайбы 7 внешним магнитопроводом 1 обеспечивают преобразователю высокую надежность и .большой ресурс в работе. Цилиндрический замкнутый магнитопровод 1 обладает малыми полями рассеивания,что позволяет поднять чувствительность прибора и существенно понизить порог чувствительности, Формула изобретения Преобразователь электрических сигналов в перемещение, содержащий магнитопровод, двухсекционную обмотку возбуждения, элементы Холла и подвижную короткозамкнутую экранирующую шайбу, отличающ-и и с я тем, что, с целью упрощения конструкции и увеличения надежности преобразователя, он содержит ферромагнитный стержень, концы которого закреплены ферромагнитными дисками в торцах магнитопровода,. который выполнен в виде полого цилиндра с прорезью вдоль образующей, внутри которого коаксиально с ферромагнитным стержнем расположена подвижная короткозамкнутая экранирукяцая шайба, а секции обмотки возбуждения, соединенные последовательно-встречно и связанные с питающим входим преобразователя, расположены на концах ферромагнитного стержня, которые выполнены с поперечными зазорами, в каждом из которых расположены рабочий и Компенсирующий элементы Холла, токовые выводы рабочих, а также токовые выводы компенсирующих элементов Холла соединены последовательно-согласно и связаны с соответствующими сигнальными входами преобразователя, потенциальные выводы рабочих элементов Холла включены последовательно-согласно, а потенциальные выводы коьтенсационных - последовательно-встречно, причем потенциальные выводы рабочих и компенсирующих элементов Холла соединены в дифференциальную цепь, выводы которой являются управляющим выходом преобразователя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 474751, кл. G 01 R 17/00, 1972. 2.Авторское свидетельство СССР 426196, кл. G 01 R 17/00, 1971.
Ф.
ш.-1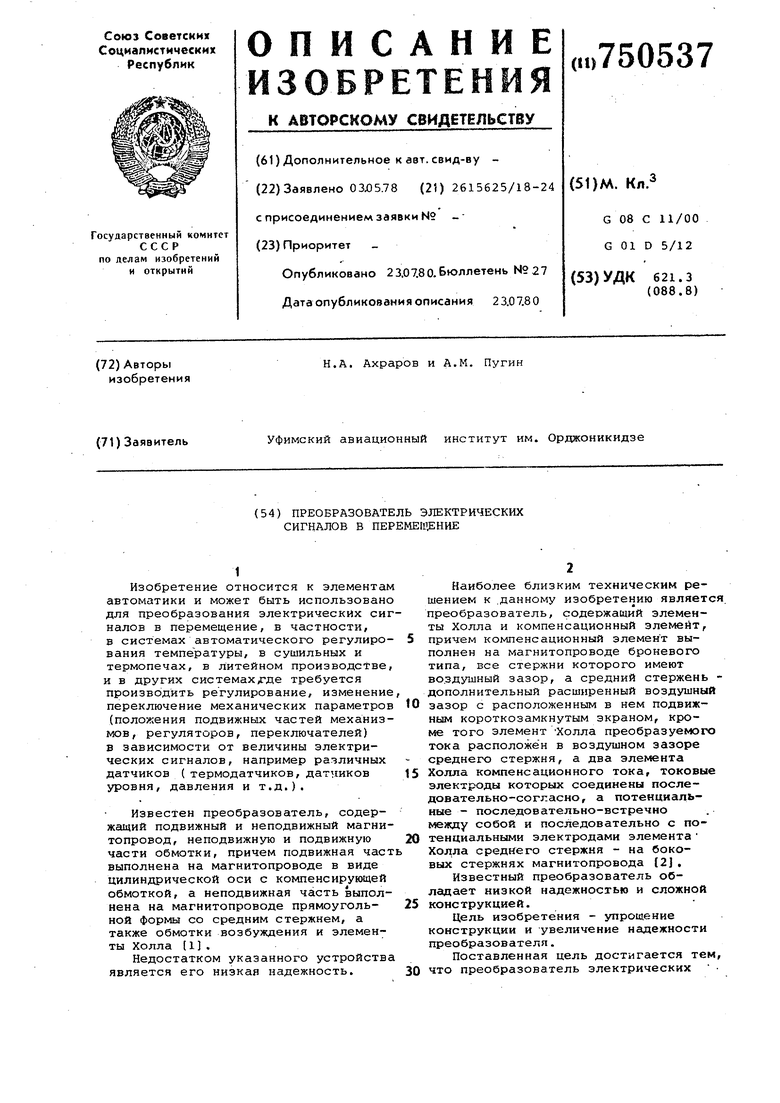
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU426196A1 |
| Преобразователь электрическогоСигНАлА B углОВОЕ пЕРЕМЕщЕНиЕ | 1979 |
|
SU842902A1 |
| Автоматический компенсатор постоянного тока | 1985 |
|
SU1308961A1 |
| Функциональный преобразователь перемещений | 1985 |
|
SU1285492A1 |
| Преобразователь для бесконтактной передачи медленно изменяющихся электрических сигналов с вращающегося объекта | 1983 |
|
SU1200349A1 |
| Устройство для преобразования постоянногоТОКА B пЕРЕМЕННый | 1979 |
|
SU847464A1 |
| Преобразователь для бесконтактной передачи медленно изменяющихся измерительных сигналов с вращающегося объекта | 1983 |
|
SU1138652A1 |
| Устройство для преобразования постоянного тока в переменный | 1980 |
|
SU920865A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1980 |
|
SU1775670A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1992 |
|
RU2046029C1 |