Ј
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный бесконтактный тахогенератор постоянного тока | 1978 |
|
SU741157A1 |
| АКСЕЛЕРОМЕТР-ТАХОГЕНЕРАТОР | 2015 |
|
RU2584576C1 |
| Синхронная @ -фазная машина с устройством для измерения продольной и поперечной составляющих токов или напряжений | 1980 |
|
SU888325A1 |
| Устройство для измерения электромагнитного момента асинхронных электрических машин | 1958 |
|
SU120871A1 |
| Реверсивный бесконтактный тахогератор постоянного тока | 1980 |
|
SU862075A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1973 |
|
SU458075A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| УСТРОЙСТВО для УЛУЧШЕНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 1969 |
|
SU248048A1 |
| Тахогенератор | 1977 |
|
SU655970A1 |
| Тахогенератор | 1980 |
|
SU1279546A3 |
Использование: измерение угловой скорости вращения. Сущность изобретения:ре- версивный бесконтактный тахогенератор постоянного тока содержит короткозамкнутый ротор, статор, состоящий из двух пар полюсов, на первой паре которого размещена обмотка возбуждения, а на каждом из полюсов установлены датчики Холла. Датчики Холла второй пары полюсов подключены к источнику постоянного тока, датчики Холла полюсов с обмоткой возбуждения расположены по оси симметрии этих полюсов, выходные цепи этих датчиков соединены последовательно - согласно между собой и последовательно-встречно с выходными цепями датчиков Холла других полюсов и соединены с входом усилителя постоянного тока. К выходу усилителя подключены цепи питания датчиков Холла полюсов с обмоткой возбуждения. 2 ил.
Изобретение относится к технике измерения параметров вращения машин, а конкретно к устройствам для измерения угловой скорости.
Известен бесконтактный тахогенератор сдатчиками Холла, магнитная цепь которого состоит из замкнутого магнитопровода, постоянных магнитов по продольной оси, ферромагнитных полюсов по поперечной оси (имеются ввиду электрические оси). Ко- роткозамкнутый ротор представляет собой цилиндр из диамагнитного или магнито- твердого материала. На концах полюсов поперечной оси в рабочем зазоре размещают датчики Холла. То.човые электроды последних подключают к источнику постоянного тока или переменного, При вращении ротора в поле постоянных магнитов возникают поперечный магнитный поток и соответствующая ЭДС датчиков Холла, пропорциональные угловой скорости вращения ротора. Для повышения крутизны передаточной характеристики на полюсах поперечной магнитной цепи размещают измерительную обмотку, напряжение с которой подают на токовые электроды датчиков Холла.
Недостатками тахогенератора являются:
малая крутизна передаточной характеристики при низких частотах вращения:
нелинейность передаточной характеристики, особенно при значительном динамическом диапазоне измерения;
погрешность измерения, вызванная зависимостью параметров датчиков Холла от температуры и нестабильностью магнитного потока возбуждения.
В качестве прототипа выбран реверсивный бесконтактный тахогенератор постоянного тока, содержащий на статоре два
3
3
О
полюса с обмоткой возбуждения и два полюса с размещенными на них датчиками Холла, подключенными к источнику постоянного тока. На роторе расположена корот- козамкнутая обмотка. Для повышения крутизны передаточной характеристики на каждом полюсе с обмоткой возбуждения размещены в рабочем зазоре симметрично относительно оси полюса дополнительно по меньшей мере два датчика Холла. Потенциальные электроды датчиков Холла, принадлежащих каждому из полюсов с обмоткой возбуждения, соединены между собой последовательно-встречно и последовательно-согласно с потенциальными электродами датчиков Холла других полюсов. Дополнительные датчики Холла также частично пронизываются поперечным магнитным потоком, пропорциональным частоте вращения ротора, благодаря чему крутизна передаточной характеристики та- хогенератора увеличивается.
Описанному тахогенератору присущи перечисленные выше недостатки, причем нелинейность передаточной характеристики вызвана соответствующей зависимостью поперечного магнитного потока от угловой скорости вращения ротора и нелинейностью передаточных характеристик датчиков Холла. Кроме того, к недостаткам следует отнести большое число используемых в та- хогенераторе датчиков Холла, что усложняет схему и удорожает устройство.
Целью изобретения является устранение указанных недостатков, а именно повышение точности, крутизны передаточной характеристики и расширение .динамического диапазона измерения,
Поставленная цель достигается тем, что в известный реверсивный бесконтактный тахогенератор постоянного тока, содержащий короткозамкнутый ротор, статор, состоящий из двух пар полюсов, на первой паре из которых размещена обмотка возбуждения, а на каждом из полюсов в рабочем зазоре установлены датчики Холла, потенциальные электроды которых связаны между собой, и индикатор, при этом датчики Холла, установленные на второй паре полюсов подключены к источнику постоянного тока, дополнительно введен усилитель постоянного тока, а датчики Холла первой пары полюсов установлены симметрично относительно продольной оси этих полюсов, при этом потенциальные электроды датчиков Холла в парах соединены между собой последовательно-согласно, а между парами -- последовательно-встречно, причем потенциальный электрод одного из дат- чиков Холла второй пары датчиков
соединен с первым входом усилителя, ко второму входу которого подключен потенциальный электрод одного из датчиков первой пары, токовые электроды датчиков
Холла первой пары объединены попарно, причем одна пара объединенных токовых электродов подключена через индикатор к первому выходу усилителя постоянного тока, другая - ко второму выходу этого же
0 усилителя.
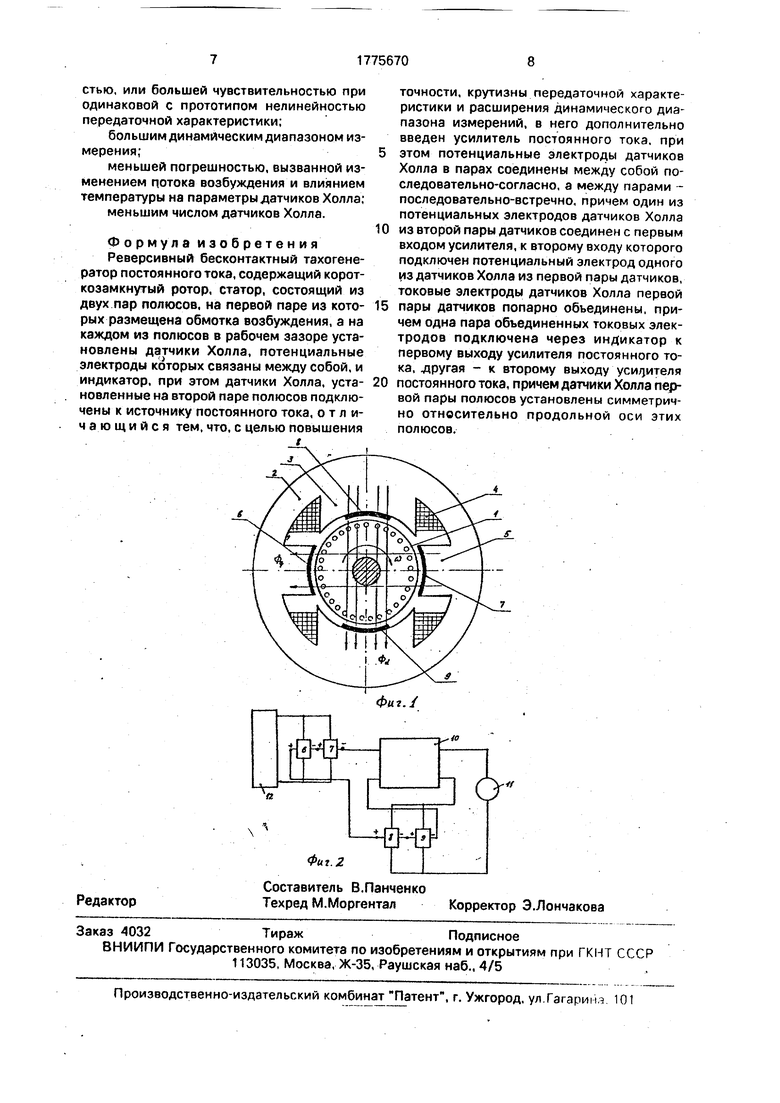
На фиг. 1 изображено поперечное сечение тахогенератора; на фиг. 2 - принципиальная электрическая схема включения датчиков Холла.
5 Реверсивный бесконтактный тахогенератор постоянного тока представляет собой электрическую машину с короткозамкнутым ротором 1, статором 2 с двумя парами полю- coBi На диаметрально противоположных по0 лостях 3 первой пары размещена обмотка возбуждения 4. На полюсах 5 второй пары в рабочем зазоре установлены датчики Холла 6 и 7. На полюсах первой пары также установлены датчики Холла 8 и 9 симметрично
5 относительно продольной оси этих полюсов. Потенциальные электроды датчиков Холла в парах соединены между собой последовательно-согласно. Один из потенциальных электродов из второй пары датчиков
0 соединен с первым входом усилителя постоянного тока 10, ко второму входу которого подключен потенциальный элект род одного из датчиков Холла первой пары датчиков. Токовые электроды датчиков Холла 8, 9
5 первой пары попарно объединены, причем одна пара этих электродов подключена через индикатор 11 к первому входу усилителя постоянного тока 10. другая - ко второму выходу того же усилителя. Токовые электро0 ды датчиков Холла б, 7 второй пары также попарно объединены и подключены к источнику постоянного тока 12. Датчики Холла в каждой из пар выбраны таким образом, чтобы из суммарное остаточное напряжение на
5 потенциальных электродах было близко к нулю.
Работает тахогенератор следующим образом. Обмотка возбуждения 4 создает по оси первой пары полюсов 3 магнитный по0 ток Фь, который пронизывает вращающийся ротор 1 и вызывает в его обмотке ЭДС. Вызванный этой ЭДС ток обмотки ротора создает неподвижный в пространстве магнитный поток Фч по оси второй пары полю5 сов 5. Поток Фч также пронизывает ротор, вызывает в его обмотке соответствующие - ЭДС и ток, а последний - магнитный поток по оси первой пары полюсов вторичную реакцию ротора. В результате магнитный поток по оси первой пары полюсов уменьшается до значения . Поток Oq, воздействуя на датчики Холла 6, 7 создает на их потенциальных электродах ЭДС
Eq Kq In. f l(t)Bq,
где Kq - чувствительность датчиков к магнитной индукции;
In - ток питания датчика;
fi(t) - функция, описывающая влияние температуры на чувствительность датчиков Холла;
Bq - магнитная индукция в рабочем зазоре второй пары полюсов.
Аналогично, поток Od, воздействуя на датчики Холла 8 и 9, создает на их потенциальных электродах ЭДС
Ed Kd Bbixf2(t)Bd,
где Kd, f2(t) параметры аналогичные, соответственно Kq и fi(t);
вых - выходной ток усилителя;
Bd - магнитная индукция в рабочем зазоре первой пары полюсов.25
На вход усилителя постоянного тока 10 подается разность ЭДС А Е Eq - Ed.
Выходной ток усилителя
lBWx (Eq-Ed)30
KyKqlnMOBq
1 +KyKdf2(t) Bd
где Ку - коэффициент усиления усилителя. 35 Обеспечив соответствующим выбором Ку выполнение соотношения KyKdf2(t)Bd 1 (при наименьшем значении Bd), получают
IBblx Rqfl(t)Bqln/Kdf2(t)Bd
При изготовлении датчиков Холла из одного и того же материала и по одинаковой технологии следует ожидать, что отношение Kqf i(t)/Kdf2(t) будет практически стабильным 45 при изменении температуры и магнитной индукции, воздействующих на датчики Холла.
Обозначив приведенное выше отношение через Ко, получают50
i - k i Bq
ВЫХ - «Ч In r
-
3d Фд
SqOd
где Sd, Sq - площади поперечных сечений полюсов.
Значения магнитных потоков
Ф0
Gq g0 Фь т go Gd Gq a + 1
10
15
5
0
5
0
5
0
5
Od
Фь
0
до Gd Gq о/2 -f 1
где Gq, Gd - магнитные проводимости по оси второй и первой пар полюсов; д0 - электрическая проводимость части обмотки ротора, ограниченной в тангенциальном направлении двугранным углом в один радиан.
Подставив значения Oq и Od в формулу для 1вых, получают
вых Ко In К- Gq go (Л .
iq
Последнее выражение показывает, что выходной сигнал - ток усилителя 10. измеряемый индикатором 11. прямо пропорционален угловой скорости вращения ротора о), т.е. передаточная характеристика тахогенератора линейная.
В тахогенераторе-прототипе имеет место нелинейная зависимость потока Фч от о, что является основной причиной нелиней ности его передаточной характеристики. Для уменьшения степени нелинейности параметры тахогенератора-прототипа выби1- рают таким образом, чтобы обеспечить
выполнение неравенства go2GqGd 1/ ffl§ где fiAj - предел измерения тахогенератора. При этом уменьшается крутизна передаточной характеристики. В данном тахогенера- торе ограничений на выбор значений параметров g0, Gq и Gd нет, что позволяет выбирать их оптимальными и обеспечить значительно большую крутизну передаточной характеристики по сравнению с прототипом при одинаковой степени нелинейности. Так, в тахогенераторе- прототипе для обеспечения степени нелинейности по магнитному потоку не
более 1 % принимают go2GqGd 0,04/ojS . В данном тахогенераторе параметры можно выбирать, исходя из соотношения g02GqGd
1 / й)§, что обеспечит повышение крутизны передаточной характеристики в 5 раз по сравнению с протЪтипом при той же степени нелинейности или при заданных параметрах расширение динамического диапазона измерения также в 5 раз.
Тахогенератор обладает следующими преимуществами: повышенной линейностью передаточной характеристики при одинаковой с прототипом чувствительностью, или большей чувствительностью при одинаковой с прототипом нелинейностью передаточной характеристики;
большим динамическим диапазоном измерения;
меньшей погрешностью, вызванной изменением потока возбуждения и влиянием температуры на параметры датчиков Холла;
меньшим числом датчиков Холла.
Формула изобретения Реверсивный бесконтактный тахогене- ратор постоянного тока, содержащий корот- козамкнутый ротор, статор, состоящий из двух пар полюсов, на первой паре из которых размещена обмотка возбуждения, а на каждом из полюсов в рабочем зазоре установлены датчики Холла, потенциальные электроды которых связаны между собой, и индикатор, при этом датчики Холла, установленные на второй паре полюсов подключены к источнику постоянного тока, отличающийся тем, что, с целью повышения
/
Фиг 2
точности, крутизны передаточной характеристики и расширения динамического диапазона измерений, в него дополнительно введен усилитель постоянного тока, при
этом потенциальные электроды датчиков Холла в парах соединены между собой последовательно-согласно, а между парами - последовательно-встречно, причем один из потенциальных электродов датчиков Холла
из второй пары датчиков соединен с первым входом усилителя, к второму входу которого подключен потенциальный электрод одного из датчиков Холла из первой пары датчиков, токовые электроды датчиков Холла первой
пары датчиков попарно объединены, причем одна пара объединенных токовых электродов подключена через индикатор к первому выходу усилителя постоянного тока, другая - к второму выходу усилителя
постоянного тока, причем датчики Холла первой пары полюсов установлены симметрично относительно продольной оси этих полюсов.
| Тахогенератор | 1960 |
|
SU134919A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1978 |
|
SU741157A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
