Изобретение относится к электротехнике и может быть использовано в электроприводах и электрических машинах для регулирова ния и пуска машин двойного питания (МДП) .
Известен способ регулирования скорости вращения асинхронной машины с фазным ротором, к которой подключен преобразователь частоты, заключающийся в изменении частоты , фазы и величины, напряжения на выходе Преобразователя 1 .
На статорную обмотку асинхронной машины подают напряжение сети частоты f i .
При регулировании скорости в диапазоне от W, 2jTfi/pi до со 1 (1 ± S) (PI - число пар полюсов мащины; S - скольжение), т.е. вверх и вниз от синхронной скорости W, частота f-2 выходного напряжения преобразователя должна изменяться в пределах от fj 0 до fi fr S. При этом активная мощность преобразователя определяется мощностью скольжения Pg PS, где Р Wi М, М - электромагнитный момент. Поэтому, если необходимо регулировать скорость мащины от w Си вы,ще, максимальное скольжение , тогда
fa f) и Pg Р, т.е. преобразователь должен быть рассчитан на установленную мощность асинхронной машины и максимальную выходную частоту, равную частоте сети, что увеличивает его габариты.
Наиболее близким техническим решением к изобретению является способ регулирования скорости вращения двигателя переменного тока, заключающийся в том, что в первом ди10апазоне регулирования обмотку статора машины, в цепь обмотки ротора которой включен преобразователь, замыкают накоротко, частоту на выходе преобразователя изменяют от fj О до fj 0,5fi для регулирования скоISрости от 0) О до 0) 0,5со, 2. Во втором диапазоне статор размыкают, включают в сеть и, изменяя частоту преобразователя от fj 0,5f i до fi О, доводят скорость двигателя до со cjj. В третьем диапазоне, изменив порядок
20 следования фаз напряжения на выходе преобразователя на обратный и изменяя частоту от fj О до fi 0,5fi, регулируют скорость выше, до 0) 1,5cj,.
Ланный способ позволяет: регулировать скорость от w О до со 1,5wi, снизить максимальяое значение выходной частоты преобразо- вателя до 0,5fi и уменьшить его установленную (активную) мощность.
Недостатками указанного способа являются: необходимость коммутации в статорной обмотке - разрыв цепи (снятие закоротки) при половинном напряжении сети, что практически трудно осуществимо для мощных высоковольтных машин и требует специального оборудования; в случае, если требуется обеспечить небольшой диапазон регулирования скорости и пуск до нижней границы этого диапазона, преобразователь все равно должен быть выбран на мощ ность 0,5 р и максимальную частоту fj 0,5fi а его тиристоры выбраны на значительное напряжение, составляющее 0,5 напряжения останова ротора.
Целью изобретения является уменьшение установленной мощности и предельной частоты выходного напряжения преобразователя и упрощение способа для машин с совмещенными обмотками разной полюсности на статоре и роторе.
Поставленная цель достигается тем, что в известном способе регулирования скорости злектрической машины двойного питания, содержа щей полюсопереключаемые совмещенные обмотки на статоре и роторе с группами выводов, при котором осуществляют подиапазонное регулирование скорости вращения путем чередования различного подключения обмоток машины двойного Питания к преобразователю частоты, к сети, замыкание одной из них накоротко и регулирование частоты преобразователя, в первом диапазоне подключают преобразователь, например, к группе выводов обмоток статора с числом полюсов 2 р2, группу выводов обмотки ротора с числом полюсов 2 р2 замыкают накоротко, а группу выводов обмотки ротора с числом полюсов 2 PJ 2р2 размыкают и регулируют частоту преобразователя от до fj fiS, где fj - частота сети, а S - скольжение, во втором диапазоне отключают преобразователь от указанной группы выводов обмотки статора и подключают его к группе выводов обмотки ротора с 2 pj числом полюсов, а группу выводов обмотки статора с аналогичным числом полюсов подключают к сети и изменяют частоты напряжения преобразователя от fj f,S до f2 О, в третьем диапазоне изменяют порядок чередования фаз преобразователя и регулируют его частоту от fj О до f2 f,- S.
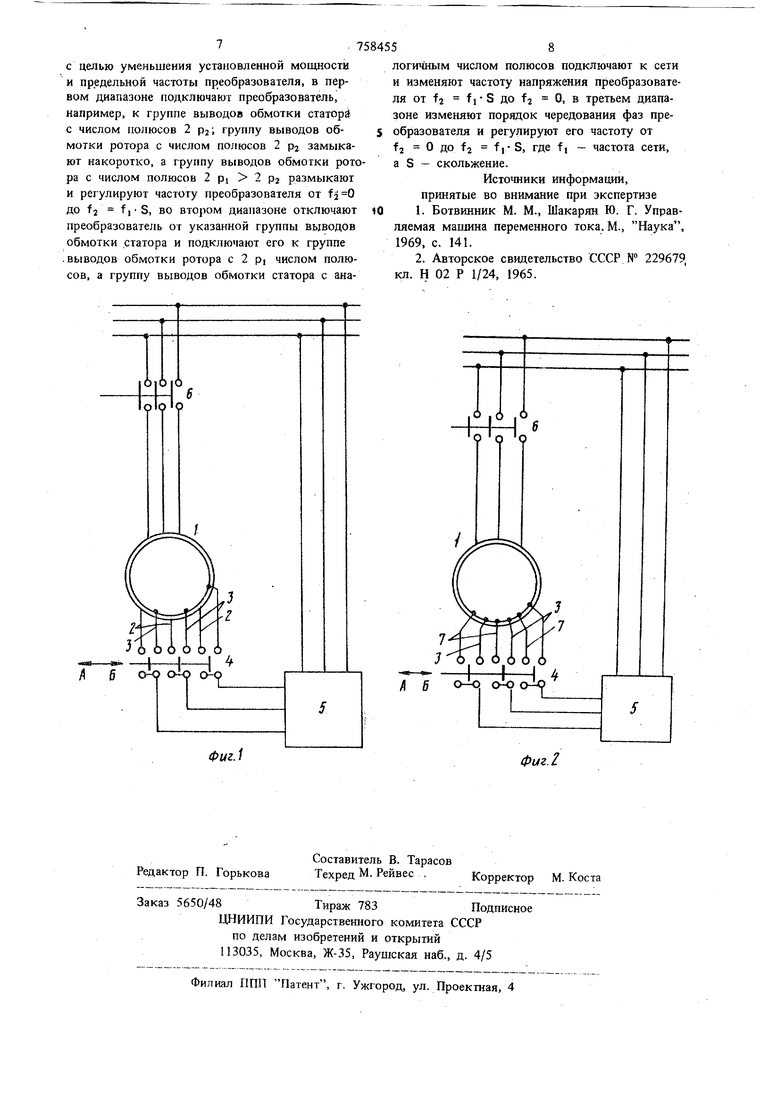
На фиг. 1 изображена схема, реализующая способ регулирования скорости вращения для МДП с замкнутой накоротко 2 Р2 - полюсной группой выводов на роторе; на фиг. 2 схема реализации способа для МДП с замкнутой накоротко 2 р2-полюсной группой выводов на статоре,
МДП содержит на статоре злектрически
совмещенные обмотки с 2 pj- и 2 рг - полюс- ными группами выводов 1 и 2. Обмотка аналогичного типа имеется и на роторе. Причем на контактные кольца выведена только 2 piполюсная группа выводов 3, а 2 pj-полюсная
группа выводов замкнута накоротко и не имеет выхода На контактные кольца. Переключатель 4 осуществляет подключение обмоток к преобразователю 5. Контактор 6 подключает группы выводов обмотки статора к сети.
При пуске мащины переключатель 4 находится в положении А, т.е. преобразователь 5 подключен к 2 р2-полюсной группе выводов статорной обмотки. В зтом случае МДП представляет собой 2 Р2-полюсную асинхронную машину с замкнутой накоротко вторичной цепью (2 Р2-полюсная группа выводов ротора замкнута накоротко) и ее синхронная скорость
27rf2 W2 ,
Pz
где f2 - частота напряжения на выходе преобразователя.
При увеличении частоты f машина начинает разгонаться и вращается с некоторым скольжением За относительно скорости вращения W2 2 р2-полюсного магнитного поля. Изменением частоты f2 выходного напряжения преобразовав т1еля можно регулировать скорость машины
CJ W2 (1 - 82)
в пределах максимальной частоты f 2 „ преобразователя. После перевода переключателя 4 в положение Б и подачи напряжения сети включением контактора 6 преобразователь 5 оказывается соединенным с 2 р,-полюсной группой выводов роторной обмотки, а 2 PI -полюсная группа выводов статорной обмотки с сетью Такая 2 pj-полюсная машина теперь работает в режиме двойного питания со скоростью о о, (1 - S,) ,
5 .- .27rf,
где coj -
- синхронная скорость;
Pi
fr
частота напряжения сети;
Si fj/f1 скольжение.
Уменьшая частоту f до нуля можно регулировать скорость до со ojj. Изменив порядок чередования фаз выходного напряжения преобразователя на обратный и увеличивая частоту fj, можно регулировать скорость а со,. Максимальное скольжение S (или диапазон регулирования скорости выше и ниже синхронной Ш|) ограничен максимально возможной частотой f2 „„КС преобразователя, г.е. в режиме двойною ггитания скорость может регулирова ся в пределах от а)(1 - S) до coj (I S) Поэтому для вывода машины в этот режим ее необходимо разогнать до нижней скорости Wi (1 - при положении А переключателя (2 р2 - полюсная машина), т.е. необходимо обеспечить условие W2N,(1 - S) СО, (1 - SJ поскольку (1 - 82) 1, то приближенно / макс/ Р2 PI 1 - fz - 1 или Р2 Например, если Sj 0,5, то необходимо обеспечить следуюшее соотношение чисел полюсов совмещенных обмоток: 2 р2 2 PI . Если S 0,2, то 2 р2 0,25 2 р,. Момент, развиваемый машиной, прямо пропорционален числам полюсов и поэтому на 1-й ступени регулирования момент MI меньше чем М2 на 2-й в p2/pi раз. Таким образом, если, например, нагрузка имеет статическую вентиляторную характеристику Mj со, то регулирование скорости возможно во всем диапазоне от со О до со coj (1 Sj), т.е. регулирование на 1-ой ступени возможно, если в диапазоне скоростей Ю-а) М,,. Предлагаемый способ может применяться для разгона без нагрузки мощных МДП скорости 1 (1 - 8„). На фиг. 2 изображена схема МДП с замкнутой накоротко группой 2 р2-полюсных выводо на статоре 2 pi и 2 р2-полюсные группы выво дов 3 и 7 обмотки ротора выведень на контактные кольца. При пуске переключатель 4 устанавливается в положение Л и производится частотное регулирование 2 р2-полюсной машины Затем, также как и на фит. 1, 2 р -полюсная статорная обмотка подключается к сети, а переключатель устанавливается в положение Б - работает в режиме двойного питания 2 pi-полюсная машина. В этом случае требуется двойной комплект контактных колец на роторе, но проще согласовать напряжение на 2 pj- и 2 р полюсных группал выводов роторной обмотки. (Пусть требуется регулировать скорость меха(низма с вентиляторной статической характеристикой (М п () в диапазон 0-625 об/мин, Тогда в случае выбирается МДП с числом полюсов 2 р 14 (п. яа428 об/мин); мощность преобразователя 214 М 0,5f, Согласно способу выбирается МДП с 2 р, 12 (п. 500 об/мин); мощность преобразователя i500 М макс. 125 М„ р 0,25f J. При этом необходимо, чтобы макс 2р, 2р,.5„ (1 - SJ 12i/(I-i) 4. НН При скорости 375 об/мин (момент переключения с 2 Ра - на 2 р,-полюсную группу выводов) момент нагрузки 0,28 М 625 Момент, развиваемый МДП, может достигать нмакс , М„„ 0,ЗЗМ„„ величины Т.е. обеспечивается условие М .- м . Таким образом, мощность преобразователя оказывается меньше в данном случае в 1,7 раза, а выходная частота в 2 раза (габаритную мощность МДП в обоих случаях можно считать одинаковой, так как она определяется максимальным моментом) . Таким образом, данный способ позволяет уменьшить мощность и частоту выходного напряжения преобразователя. По данному способу можно регулировать и пускать не только МДП-двигателя, но и МДП-компенсаторы и электромеханические преобразователи частоты для связи энергосистем (ЭМПЧ). В последних случаях преобразователь обьгшо рассчитан на небольшой диапазон регулирования, а запуск производится на холостом ходу. Применение данного способа может позволить отказаться от использования сложных и дорогостоящих способов пуска, например, с помощью разгонных двигатепей, специальных генераторов и т.д. Формула изобретения Способ регулирования скрости вращения электрической машины двойного питания, содержащей полюсопереключаемые совмещенные обмотки на статоре и роторе с группами выводов, при котором осуществляют подиапазонное регулирование скорости вращения путем чередования различного подключения выводов обмоток машины двойного питания к преобразователю частоты, к сети,замыканию одной из них накоротко и регулированию частоты преобразователя, отличающийся тем, что. с целью уменьшения установленной мощности и предельной частоты преобразователя, в первом диапазоне подключают преобразователь, например, к группе выводов обмотки статорй с числом полюсов 2 PJ ; группу выводов обмотки ротора с числом полюсов 2 pj замыкают накоротко, а группу выводов обмотки рото ра с числом полюсов 2 PI 2 р2 размыкают и регулируют частоту преобразователя от до fj fjS, во втором диапазоне отключают преобразователь от указанной группы выводов обмотки статора и подключают его к группе .выводов обмотки ротора с 2 pi числом полюсов, а группу выводов обмотки статора с ана758 логичным числом полюсов подключают к сети и изменяют частоту напряжения преобразователя от f г fj-S до fa О, в третьем диапазоне изменяют порядок чередования фаз преобразователя и регулируют его частоту от fj О до f2 f 1 S, где f 1 - частота сети, а S - скольжение. Источники информации, принятые во внимание при экспертизе 1. Ботвинник М. М., Шакарян Ю. Г. Управляемая машина переменного тока. М., Наука, 1969, с. 141. 2. Авторское свидетельство СССР N 229679, кл. Н 02 Р 1/24, 1965.
О |6 ,0
О о
fi в сДо смэ о-
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Однофазный одномашинный преобразовательчАСТОТы | 1979 |
|
SU851676A1 |
| Двухдвигательный электропривод с электромеханическим преобразователем частоты | 1990 |
|
SU1713073A1 |
| Одномашинный асинхронно-синхронный преобразователь частоты | 1975 |
|
SU600670A1 |
| Многофазная обмотка ротора двухскоростного асинхронного двигателя (ее варианты) | 1982 |
|
SU1101979A1 |
| Одномашинный преобразователь частоты | 1981 |
|
SU966820A1 |
| Статический преобразователь частоты | 1983 |
|
SU1117794A1 |
| Трехфазная совмещенная обмотка ротора | 1982 |
|
SU1050044A1 |
| Асинхронно-синхронный бесконтактный преобразователь частоты | 1989 |
|
SU1721743A1 |
| Устройство для регулирования частоты тока в автономной системе электроснабжения | 1981 |
|
SU985920A1 |
| УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ ПЕРЕМЕННОГО ТОКА ПЛАВНО ИЗМЕНЯЕМОЙ ЧАСТОТЫ | 1954 |
|
SU101976A1 |
