Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока.
Цель изобретения - расширение диапазона регулирования частоты вращения и повышение коэффициента мощности. .
На чертеже представлена схема двухдвигательного электропривода с электромеханическим преобразователем частоты (ЭМПЧ).
Двухдвигательный электропривод содержит основные асинхронные двигатели с фазными роторами 1 и 2 одинаковой мощности и синхронной частотой вращения (одинаковое число полюсов) с индивидуальной нагрузкой на валу . Статорные обмотки основных двигателей подключены к сети переменного тока, а роторные обмотки - к роторным обмоткам дополнительных асинхронных двигателей 3 и 4 с фазными ротррами с числом полюсов Pi и Р2 соответственно. Вторые концы роторныхобмоток дополнительных асинхронных двигателей 3 и 4 соединены между собой с обратным чередованием фаз, а валы дополнительных двигателей соединены механически жестко Статорные обмотки двигателя 4 подключены к сети, а статорные обмотки двигателя 3 - к управляемому регулятором 6 тиристорному преобразователю 5 частоты (ТПЧ). На вход регулятора подается сигнал от датчика 7 положения ротора и датчика 8 сети.
Двухдвигательнь1й электропривод может работать в двух режимах: в режиме электромеханического каскада, когда энергия скольжения основных двигателей с помощью ЭМПЧ передается обратно в сеть, и в режиме двойного питания, когда с помощью ЭМПЧ энергии из сети передается в роторные обмотки основных двигателей.
В зависимости от того, подводится или отводится энергия от ротора основных двигателей, Двухдвигательный электропривод работает следующим образом.
Если энергия скольжения основных двигателей 1 и 2 отводится от ротора, то дополнительный двигатель 3 с фазным ротором работает в двигательном режиме, а двигатель 4 - в генераторном режиме. При этом с датчиков 7 и 8 поступают сигналы на входы регулятора 6, который управляет тиристорным преобразователем 5 частоты. Так как двигатель 4 работает в генераторном режиме, а частота вращения его ротора не соответствует синхронной частоте сети, то частота вращения ротора дополнительного двигателя 3 формируется регулятором 6 в виде разности частоты промышленной сети и частоты вращения ротора основных
двигателей. Поэтому дополнительный двигатель 4 генерирует мощность промышленной частоты в сеть.
Таким образом электропривод, состоящий из двух асинхронных двигателей с фазным ротором и управляемого тиристорного преобразователя частоты, преобразует и трансформирует энергию скольжения основных двигателей в сеть.
0 Если энергия из сети подводится к ротору основных двигателей 1 и 2, то дополнительный асинхронный двигateль 4 работает в двигательном режиме, а дополнительный двигатель 3 - в генераторном режиме. При
5 этом с датчиков 8 и 7 поступают такие сигналы на входы регулятора 6, при которых частоты роторных токов основных и дополнительных двигателей равны. Таким образом, ЭМПЧ трансформирует и преобразует
0 напряжение промышленной сети в напряжение другой частоты, равное частоте тока роторной цепи основных двигателей. При этом двигательный электропривод работает в режиме двойного Г1итания,что позволяет
5 улучшить коэффициент мощности основных двигателей, доведя его до единицы.
Из теории электрических двигателей известно, что для работы двигателя переменного тока в установившемся режиме
0 необходимо, чтобы МДС статора и ротора в пространстве были взаимно неподвижными. Данное условие для дополнительного двигателя 4 записывается следующим образом:
Wl Ш+(О2 ,(1)
где ft)i и У2 - угловая скорость векторов напряжения соответственно статора и рото0 ра;
О)- угловая скорость ротора. Так как
27rfi
Р2
uJ 2 jr п ;
2yii2
(2)
С02
Р2
где fi - частота сети;
п и Р2 - частота вращения ротора и чис.ло полюсов асинхронной машины 4;
f2 - частота тока роторной обмотки машины 4, то соотношение (1) с учетом (2) имеет вид:
fi P2n+f2.
(3) Условие неподвижности МДС статора и ротора в пространстве для асинхронного двигателя 3 с учетом того, что роторная обмотка этого двигателя подсоединена с обратным чередованием фаз, а статорные обмотки - к управляемому ТПЧ, записывается следующим выражением: fs Prn-f2, где fs - частота напряжения ТПЧ; Pi - число полюсов асинхронного двигателя 3. Частоты токов роторных обмоток основных и дополнительных двигателей равны, так как эти обмотки соединены последовательно. Частоту fs можно,определить через скольжение ротора основного двигателя 1 -S. Из соотношений (3)-(5) следует, что частота напряжения ТПЧ, fs fi Pi/P2-S(1+Pi/P2). Ё силу обратимости электрических машин независимо от того, подводится или отводится энергия ротора основных двигателей, частота напряжения ТПЧ определяется выражением (6). Это означает, что дополнительный асинхронный двигатель 3 как в двигательном, так и в генераторном режимах работает при скорости выше синхронной, а дополнительны двигатель 4 как в двигательном, так и в генераторном режимах - при скорости ниже синхронной. Таким образом, частота выходного напряжения ТПЧ определяется выражением (6) и не зависит от того, подводится или отводится энергия скольжения от ротора основных двигателей. Электропривод двухзонного одновременного регулирования частоты вращения двух двигателей более экономдлчен по сравнению с двухдвигательным электроприводом, в котором регулирование частотой вращения ротора каждого двигателя осуществляется индивидуальным ТПЧ в цепи ротора в режиме двойного питания. Экономичность электропривода заключается в том, что требуется один преобразователь гораздо меньшей мощности и два трехфазных двигателя с фазным ротором. При индивидуальном регулировании каждого двигателя в отдельности в режиме двойного питания необходимо два преобразователя с двумя трансформаторами и согласующее устройство для одновременного регулирования частоты вращения двух двигателей. Кроме того, основные двигатели могут работать в режиме выдачи реактивной мощности и снижать искажение питающей сети. Формулаизобретения Двухдвигательный электропривод с электромеханическим преобразователем частоты, содержащий два основных асинхронных двигателя с фазным ротором, статорные обмотки которых предназначены для подключения к сети, а также управляемый тиристорный преобразователь частоты, отличающийся тем, что, с целью расширения диапазона регулирования частоты вращения и повышения коэффициента мощности, в роторную цепь каждого основного двигателя введены два дополнительных асинхронных двигателя с фазным ротором неодинаковой полюсности, причем одни концы роторных обмоток дополнитель ; двигателей подключены соответственг. к роторным обмоткам основных двигателей с фазным ротором, а другие концы роторных обмоток дополнительных двигателей сдединены между собой с обратным чередованием фаз и валы дополнительных двигателей соединены жестко между собой, кроме того, статорные обмотки первого дополнительного двигателя предназначены для подключения непосредственно в сеть, а второго - через управляемый тиристорный преобразователь частоты.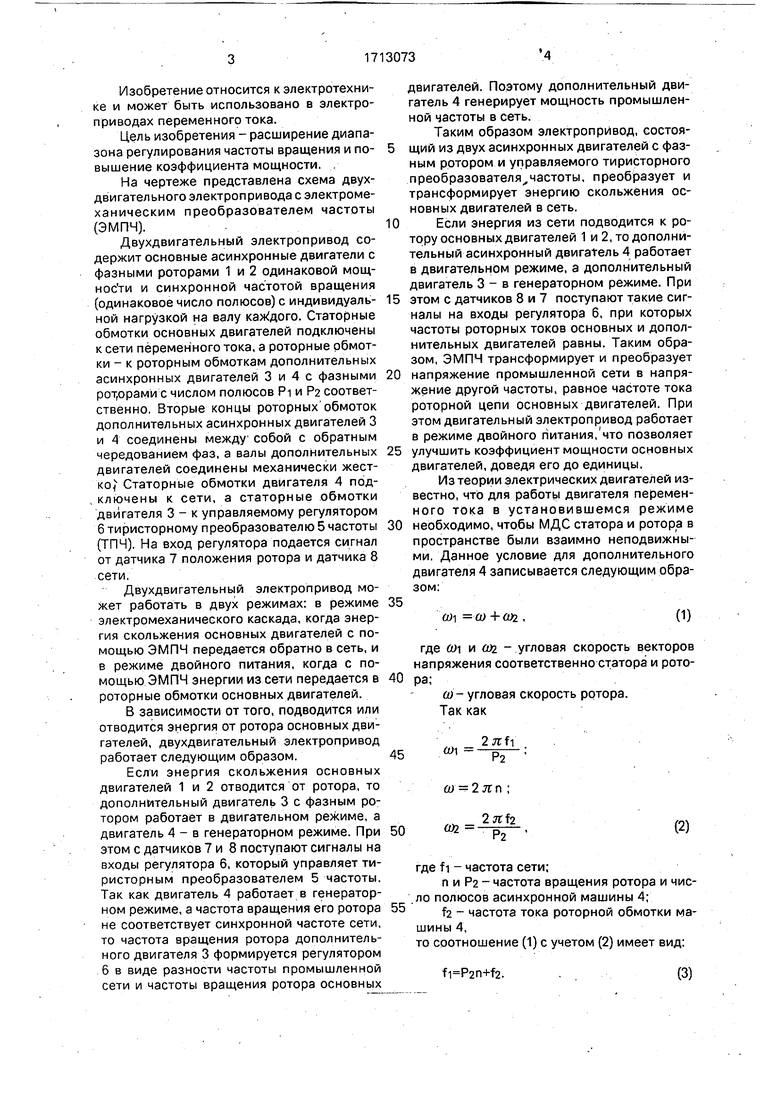

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2241837C2 |
| Электропривод | 1979 |
|
SU896734A1 |
| Тяговый электропривод | 2020 |
|
RU2751372C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| УСТРОЙСТВО СОВМЕЩЕННОГО ЭЛЕКТРИЧЕСКОГО ТОРМОЗА И ЭЛЕКТРОПРИВОДА ПОДАЧИ ДОЛОТА ДЛЯ БУРОВОЙ ЛЕБЕДКИ | 2002 |
|
RU2222490C1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| Двухдвигательный регулируемый электропривод | 1979 |
|
SU879725A1 |
| Электропривод переменного тока | 1982 |
|
SU1086537A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
Изобретение относится к.электротехнике и может быть использовано в электропри- водах переменного тока. Целью изобретения является расширение диапазона регулирования частоты вращения и по- вышение коэффициента мощности. Электропривод содержит два основныхCffTfbасинхронных двигателя 1 и 2, в цепи роторов которых включены роторные цепи дополнительных асинхронных двигателей 3. Одни концы роторных обмоток дополнительных двигателей подключены соответственно к роторным обмоткам основных двигателей 1 и 2 с фазным ротором, а другие концы роторных обмоток дополнительных двигателей 3 и 4 соединены между собой с обратным чередованием фаз. Валы дополнительных двигателей 3 и 4 соединены жестко, между собой. Статорные обмотки одного дополнительного двигателя 3 подключены непосредственно в сеть, а другого к управляемому тиристорному преобразователю частоты 5. В данном устройстве достигается возможность регулирования частоты вращения электродвигателей 1 и 2 ниже и выше синхронной скорости. 1 ил.00с-viсоо ^со>&
| Способ изотермической штамповки | 1985 |
|
SU1355338A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
