Изобретение относится к электротехнике и может быть использовано в мног двигательном приводе, где необходимо согласованное их вращение. Известен электрический вал, содержа щий два асинхронных двигателя со вспомогательными двигателями на их валу, обмотки статоров которых соединены между собой, а обмотки роторов подклю чены к регулятору напряжения l. Однако это устройство имеет низкий синхронизирующий момент в зоне высо ких скоростей вращения двигателей. Наиболее близким к предлагаемому является электрический вал, у которого обмотки роторов асинхронных двигателей объединены и подключены ко входу выпрямителя, подключенного ко вкоду игшертора через дроссель, выходом соединенного с источником переменного тока 2j. Известное устройство имеет низкую точность поддержания синхронного вра- щения двигателей в широком диапазоне регулирования их скорости. Цель изобретения - повышение точности синхронизации. Указанная цель достигается тем, 4tro в электрическом вале, содержащем два асинхронных двигателя с соединением обмоток роторов между собой, вал каждого из которых соединен со вспомогательным синхронным двигателем, регулируемый выпрямитель, подключенный к обмоткам роторов синхронных двигателей, обмотки статоров которых соединены между собой, выпрямитель, подключенный к обмоткам роторов асинхронных двигателей, инвертор, подключенный к выходу выпрямителя через дроссель, блоки управления инвертором и регулируемым выпрямителем, выход инвертора подключен к обмоткам статоров синхронных двигателей, вход блока управления регулируемого выпрямителя через сумматор соединен с дросселем.
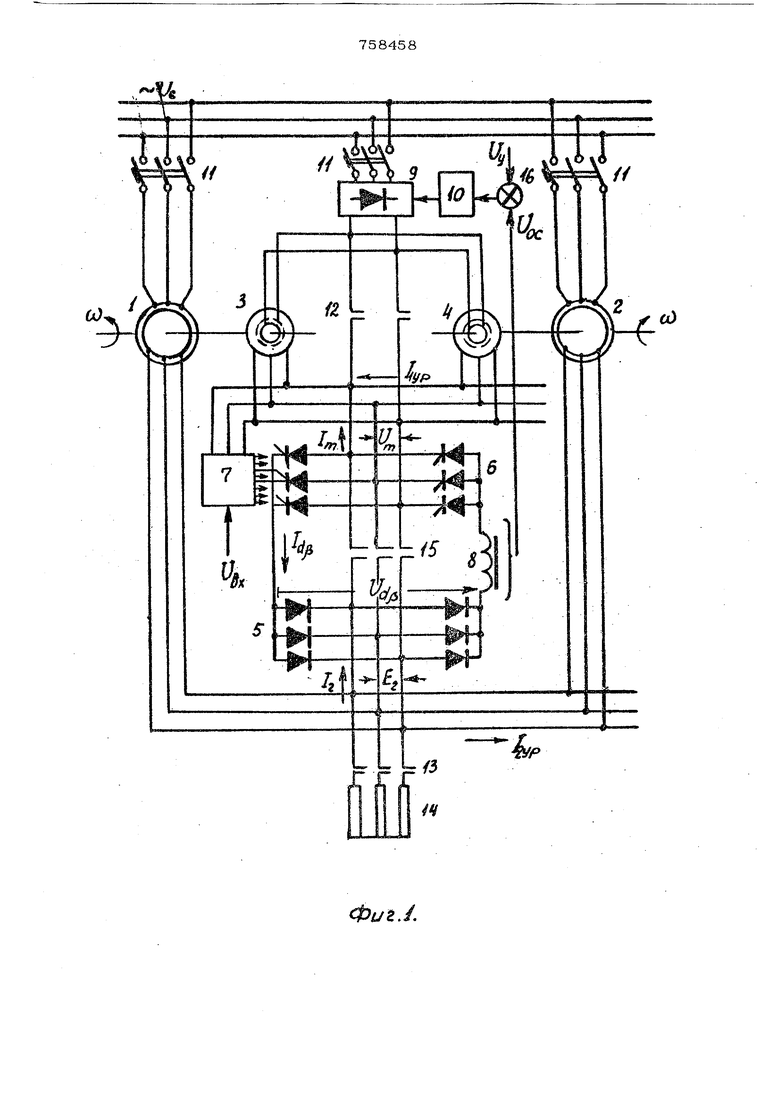
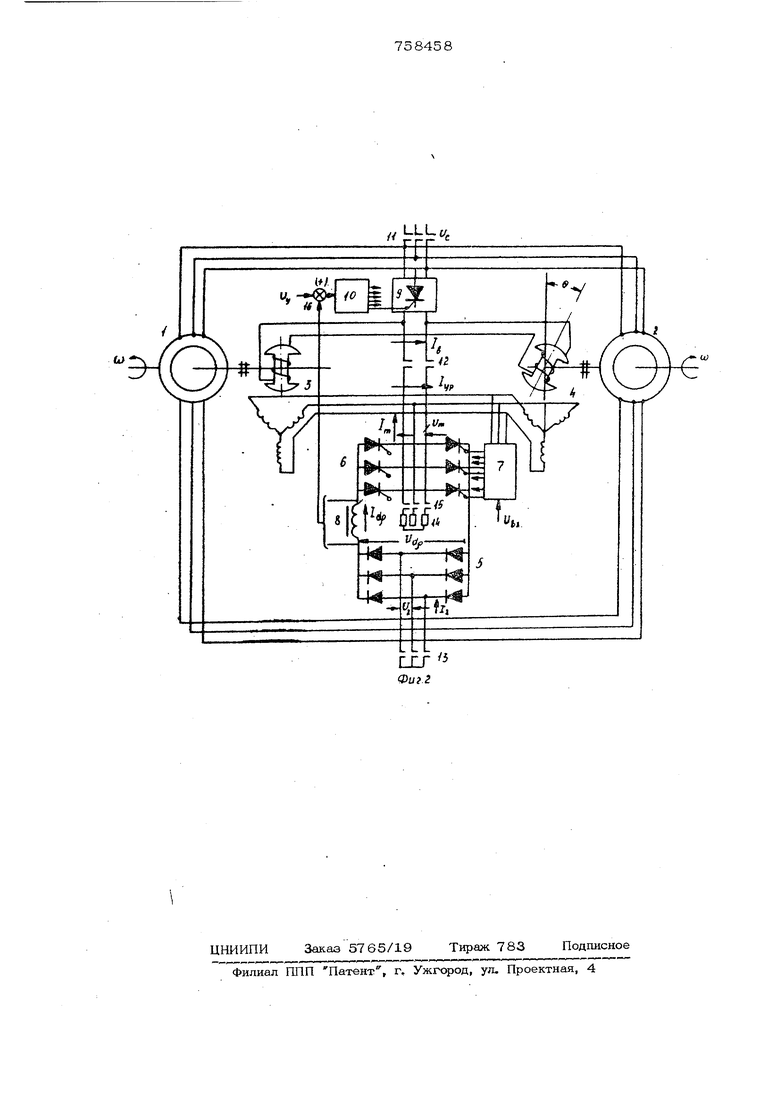
На фиг. 1 показана блок-схема элект. рического вала с асинхронными двигате лями с фазным рогором; на фиг. 2 - то же, с короткозамкнутым ротором.
Электрический вал содержит аскнхрон ные двигатели 1, 2 и синхронные двигатели 3, 4, расположенные на их валу, выпрятхлитель 5 в цепи обмоток роторов. или статоров асинхронных двигателей 1, 2 и инвертор 6 с блоком 7 управления, подключенный к обмоткам статоров син-i хронных двигателей 3, 4, дроссель 8 на выходе выпрямителя 5, регулируемый выпрямитель 9, подключенный к обмот кам статоров синхронных двигателей 3, 4, блок управления выпрямителем 10, выпрямители 11, контакторы 12, 13, пусковые резисторы 14, контактор 15 и сумматор 16.
Устройство работает следующим образом.
Пуск электрического вала может pea.лизоваться вхолостую либо под нагрузкой включением выключателей 11 и контактора 13. Система с главными асинхронными двигателями 1,2с фазными роторами пускается с введенным пусковым резистором 14. При этом разбег отдельных двигательных групп электрического вала происходит под действием только электромагнитных моментов главных асинхронных двигателей 1 и 2, а синхронность их вращения поддерживается уравнительными моментами, обусловленными уравнительными токами роторных цепей асинхронных двигателей ( ) и статорных синхронных двигателей -( ), Е)Спомогательные синхронные двигатели 3 и 4 с момента наведения в статорных обмотках ЭДС вращения и до реализации естественной коммутации инвертора развивает лишь добавочный уравнительный момент. Г имерно при скорости Ыо обеспечивается естественная коммутация вентилей инвертора 6 и реализация энергии скольжения АД. С этого момента синхронные машины развивают одновременно и добавочные двигательные моменты. Пусковой резистор 14 после завершения пуска отключается.
В регулировочном режиме электрического вала в роторную цепь главных асинхронных двигателей вводится противоЭДС инвертора 6, обусловленная возбуж- денными синхронными машинами, напря ЖШ1В9 которого ,
-
где р) - угол опережения отпирания
вентилей инвертора 6, задаваемый сигналом управления инвертором Ubx .п
Соответствующим изменением угла vjr обеспечивается работа системы в режиме регулируемого электрического вала. При этом вся мощность энергии скольжения асинхронных двигателей 1, 2 инвертируется и расходуется вспомогательными синхронными двигателями 3 и 4 в виде механической мощности, т. е. передается
, на валы последних.
В установившемся режиме работы напряжение и частота тока на выходе инвертора 6 остаются неизменными, а величины электромагнитных моментов и, следовательно, мощностей, развиваемых отдельными группами машин, определяются нагрузками и скольжением главных асинхронных двигателей.
При возникновении рассогласования в системе вала по фиг. 1, определяемого углом сдвига осей роторов Э , электромагнитные моменты отдельных агрегатов отличаются друг от друга на величину суммарного уравнительного момента,
создаваемого главным и вспомогательным двигателями каждого каскада одновременно
1-5
s;;)
М
xsioQ.
ЭЛ1
у вала по фиг. 2 - вторым слагаемым того уравнения. десь М
- максимальное значение
м электромагнитного момента синхронного двигателя ,
s критическое скольжение,
.T/4 J
Хс полное синхронное индуктивное сопротивление С Хс Ха+Хб-;
KOI XQ:- индуктивности взаимоиндукции и рассеяния обмот.ки статора;
- активное сопротивление
статорной обмотки. У ускорившегося каскада по фиг. 1 суммарный момент действует на валу с отрицательным знаком, т. е. вызывает его торможение, а у замедлившегося каскада этот момент положительный и, следовательно, обеспечивает его ускорение до восстановления полного синхронизма.
Если ВЕШ работает в режиме холостого хода или с малой нагрузкой, то ин-
вертор 6 либо закрыт, либо имеет сравнительно большой опережения отпирания вентилей Ь , т. е. вводимое в цепь роторов главных двигателей напряжение U(g, О. Однако на зажимах воз« бужденных синкронных машин в этом режиме напряжение Цп- e o o (1-S) максимальное (где Ф - магнитный поток одной машины (3,4) при холостом ходе). Поэтому в режиме холостого хо- да главных асинхронных двигателей (S S О) надежная синхронизация в сиртеме вала и, следовательно, его статическая и динамическая устойчивость обеспечивает вспомогательные сингфонные двигатели.
Таким образом, в области высоких скоростей рассматриваемые электрические валы работают устойчиво, если регулирование скорости вниз от холостого хо« да (U)o ) реализуется углом опережения отпирания вентилей инвертора jbi-p)при перевозбужденных вспомогательных синхронных двигателях.
На малых скоростях, благодаря срав- нительно большой ЭДС на кольцах рото-. ров двигателей 1 и 2 .ifc уравнительные моменты, развиваемые асинхронными машинами вала по фиг. 1, максимальны, а уравнительные моменты, развиваемые вспомогательными двигателями 3 и 4, из-оа сравнительно малого уровня ЭДС их статорных обмоток СМ О1и (1 -S) минимальны.
Следовательно в системе электричес кого вала на всех его регулировочных характеристиках обеспечивается почти неизменный уравнительный момент, создаваемый главными и вспомогательными
двигателями одновременно, что псхэволяет повысить точность синхронизации двигателей в широком диапазоне регулирования скорости вала.
Формула изобретения
Электрический вал, содержащий два асинхронных двигателя.с соединением обмоток роторов между собой, вал каждого из которых соединен со вспомогательным синхронным двигателем, регулируемый выпрямитель, подклченный к обмоткам роторов синхронных двигателей, обмотки статоров которых соединены между со- бой вьшрямитель, подключенный к обмоткам роторов асинхронных двигателей, инвертор, подключенный к выходу выпрямителя через дроссель, блоки управления . инвертором и регулируемым -выпрямителем, отличающийся тем, что с целью повышения точности синхронизации в широком диапазоне регулирования скорости вала, выход инвертора подключен к обмоткам статоров синхронных двигателей, вход блока управления регулируемого выпрямителя через дополнительно введенный сумматор соединен с дросселем,
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство
№ 68656, кл. Н 02 Р 7/78, 1947.
2.Состояние и перспективы развития электропривода по систгемё Рабочий электрический вал. М., Информэлектро, 15.08.78, с. 12-15.
П
О),
Ц
L
n
0)
/
fyp
-тИп


| название | год | авторы | номер документа |
|---|---|---|---|
| СТАРТЕР-ГЕНЕРАТОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2010 |
|
RU2528950C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| СТЕНД ДЛЯ НАГРУЖЕНИЯ СИНХРОННЫХ МАШИН ПРИ ИСПЫТАНИЯХ | 1991 |
|
SU1818984A1 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОМАШИННЫЙ АГРЕГАТ | 1971 |
|
SU311362A1 |
| Машинно-вентильный каскад | 1973 |
|
SU508874A2 |
| МАШИННО-ВЕНТИЛЬНЫЙ КАСКАД | 1971 |
|
SU312343A1 |
| Двухдвигательный электропривод переменного тока | 1985 |
|
SU1292159A1 |
| ДВУХДВИГАТЕЛЬНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1972 |
|
SU425292A1 |
| УСТРОЙСТВО СОГЛАСОВАННОГО ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2015 |
|
RU2596216C1 |
1
Ц
Л
J4
4
b b/3 44
Г1
ФtJZJ,
