(54) КОНДУКТОР АГЗАМОВА ДЛЯ МОНТАЖА СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ
I
Изобретение относится к строительной технике для установки в проектное положение различных строительных конструкций, в частности стеновых панелей сборных крупнопанельных зданий.
Известен кондуктор для монтажа строительных конструкций, содержащий вертикальные стойки, попарно установленные по обеим сторонам здания в каретках для возможности перемещения по рельсам вдоль монтируемого здания I.
На этих стойках закреплена кондукторная рама таким образом, что она находится над монтируемым зданием. Для вертикального перемеш ения кондукторной рамы предусмотрены гидравлические подъемники, установленные в каждой паре вертикальных стоек.
Подобное устройство не обеспечивает требуемой точности выставления монтируемых панелей ( + 5 мм по СНИПу III - 16-73) вследствие большего отклонения по высоте рельсовых путей, а автоматический контроль положения кондукторной рамы отсутствует. Кроме того, это устройство неудобно для монтажа многоэтажных зданий, поскольку
опорные вертикальные стойки обязательно должны превышать высоту здания.
Наиболее близким к изобретению по технической сущности и достигаемому результату является кондуктор для монтажа строительных конструкций, содержащий раму с опорными стойками и фотоприемниками, связанными с источником света, и механизмы вертикального и горизонтального перемещения рамы, электрически связанные с фотоприемниками 2.
10 Устройство предназначено для выверки колонн каркасов зданий.
Это устройство позволяет монтировать с выверкой в пространстве только колонну и не позволяет производить монтаж и выверку таких длинномерных в горизонтальной
15 плоскости конструкций, как. стеновые панели.
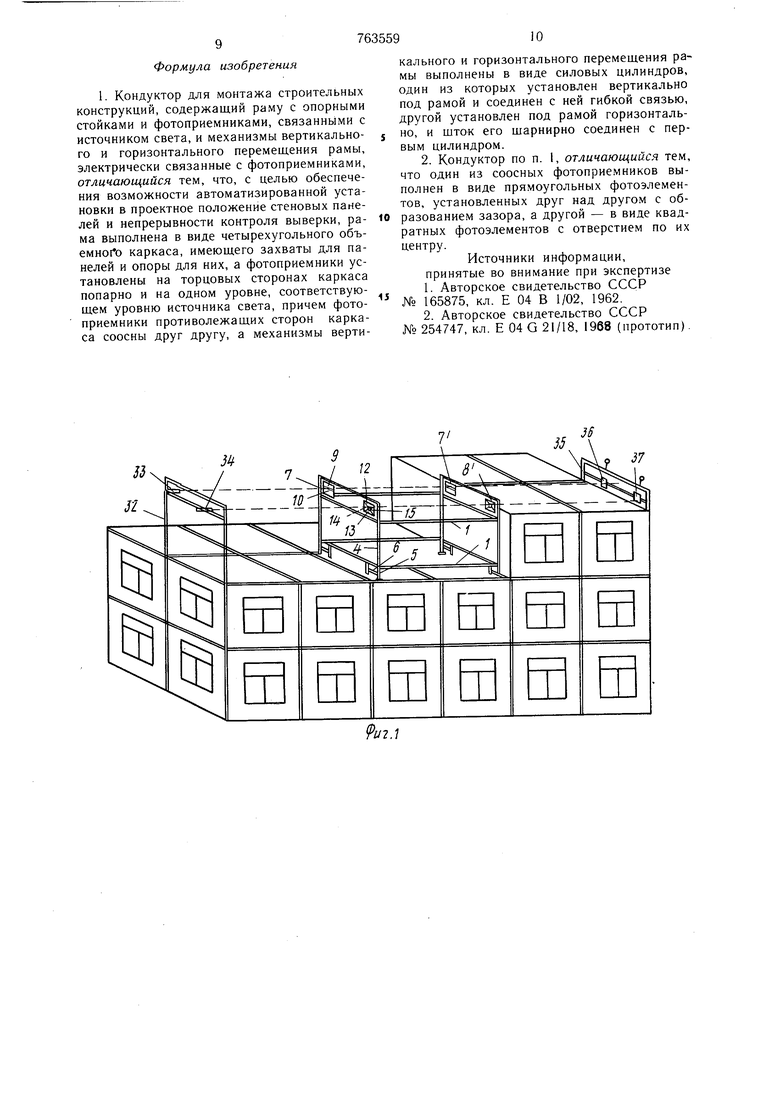
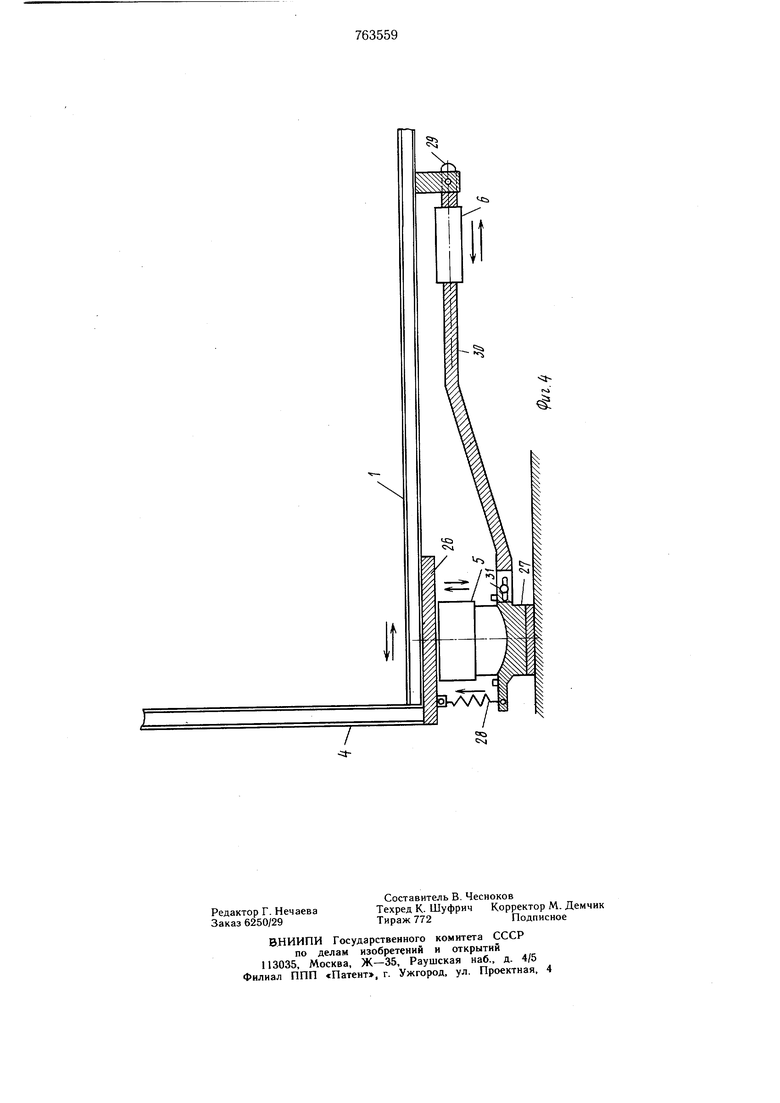
Данный кондуктор не позволяет одновременно монтировать и выверять более одной строительной конструкции. Для монтажа и выверки следующей колонны кондуктор надо переставлять, производя после каждой перестановки новую выверку направления светового луча. К тому же это устройство не обеспечивает возможность постоянноГО контроля за направлением светового луча, и, если последний будет по каким-либо причинам сбит в процессе монтажа с заданного направления, дальнейшая выверка стро ительной конструкции по нему приведет к браку в работе. Цель изобретения - обеспечение возможности автоматизированной установки в проетное положение стеновых панелей и непрерывности контроля выверки. Это достигается тем, что у кондуктора, содержащего раму с опорными стойками и фотоприемниками, связанными с источником света, и механизмы горизонтального и вертикального перемещения рамы, электрически связанные с фотоприемниками, рама выполнена в виде четырехугольного объемного каркаса, имеющего захваты для панелей и опоры для них, а фотоприемники установлены на торцовых сторонах каркаса попарно и на одном уровне, соответствующем уровню источника света, причем фотоприемники противолежащих сторон каркаса соосны друг другу, а механизмы вертикального и горизонтального перемещения рамы выполнены в виде силовых цилиндров, один из которых установлен вертикально под рамой и соединен с ней гибкой связью, другой установлен под рамой горизонтально, и щток его щарнирно соединен с первым цилиндром. Один из соосных фотоприемников выполнен в виде прямоугольных фотоэлементов, установленных друг над другом с образованием зазора, а другой - в виде квадратных фотоэлементов с отверстием по их центру. На фиг. 1 схематически изображено описываемое устройство; на фиг. 2 - кондуктор, поперечный разрез; на фиг. 3 - блок-схема электрической и гидравлической цепи кондуктора; на фиг. 4 - узел совмещения механизма горизонтального и вертикального перемещений. Кондуктор содержит четырехугольную каркасную раму 1, в верхней части которой щарнирно установлены вилочные захваты 2 для панелей, В нижней части рамы 1 имеются опорные элементы 3 для фиксирования в проектном положении низа устанавливаемой панели. Под каждой стойкой 4 рамы 1 вертикально установлен силовой гидравлический цилиндр 5 и горизонтально-силовой гидроцилиндр 6 с возможностью горизонтального воздействия на соответствующую стойку 4. В четырех верхних углах рамы 1 жестко закреплены фотоприемники 7,7 и 8,8 причем фотоприемники 7 и 7 установлены на одной стороне рамь соосно друг другу, а фотоприемники 8 и 8таким же образом установлены на другой стороне рамы. Каждый из фотоприемников 7, 7 содержит верхний и нижний фотоэлементы 9 и 10 с прозрачной щелью 11 между ними. Каждый из фотоприемников 8 содержит квадратный фотоэлемент с секторами 12, 13, 14, 15 и прозрачным отверстием 16 в центре фотоприемника. Щель 11 и отверстие 16 предназначены для контроля нейтрального положения кондуктора. У фотоприемника 7 верхний фотоэлемент 9электрической цепью через усилитель 17 и реле 18 соединен с электромагнитным включателем 19, тогда как нижний фотоэлемент 10через усилитель 20 и реле 21 соединен с электромагнитным включателем 22. Оба включателя 19 и 22 установлены на золотниковом гидрораспределителе 23 для управления подачей давления рабочей жидкости в верхнюю и нижнюю часть соответствующего гидроцилиндра 5. У фотоприемника 6 цепи связи секторов 12 и 13 с соответствующим гидроцилиндром 5 и секторов 14 и 15 с соответствующим гидроцилиндром 6 аналогичны вышеописанной. Для подачи рабочей жидкости в гидросистему с последней соединен бак 24, а для создания давления в гидросистеме в нее включен гидронасос 25. Узел гидроцилиндров для вертикального и горизонтального перемещения стойки 4 может быть выполнен в виде вертикально установленного на плиту перекрытия силового гидроцилиндра 5, взаимодействующего с пластиной 26 рамы 1. Опорный башмак 27 цилиндра 5 также связан с пластиной 26 пружиной 28. Между взаимодействующими поверхностями гидроцилиндра 5 и пластины 26 имеется смазочный материал. Гидроцилиндр 6 шарнирно закреплен на нижней части рамы 1 в точке 29 и посредством штока 30 также щарнирно соединен с башмаком 27 в точке 31. На одном торце монтируемого здания закреплена опорная рама 32, несущая источники когерентного светового луча 33 и 34, например маломощные полупроводниковые лазеры, на противоположном торце этого здания закреплены опорная рама 35, несущая контрольные фотоэлементы 36 и 37, установленные соосно лазерам 33 и 34 соответственно. Каждый из контрольных фотоэлементов известным способом электрически соединен с соответствующим иточником. светового или звукового сигнала. Описанное устройство работает следующим образом. На одном торце монтируемого здания закрепляется рама 35, и при помощи геодезических приборов на ней устанавливаются в заданное положение по высоте и в горизонтальном контрольном плане контрольные фотоэлементы 36 и 37. На противоположном торце здания закрепляется рама 32 с лазерами 33 и 34. Положение последних выверяется по уже установленным контрольным фотоэлементам 36 и 37 направлением на них узкого светового луча. При попадании. луча на соответствующий контрольный фотоэлемент включается световой сигнал, например, загорается зеленая лампочка, и лазер закрепляется геодезистом в данном положении. Таким образом получаются две продольные оси, проходящие вдоль всего монтируемого здания в строго заданном направлении на определенной высоте. Затем лазеры можно выключить. После этого на плиты перекрытия подвала или нижнего этажа краном произвольно устанавливается рама 1 с захватами 2 и опорами 3 для панелей. Рама 1 опирается о плиту перекрытия опорными башмаками 27 силовых гидроцилиндров 5 вертикального перемещения рамы. Рама 1 под каждой своей стойкой 4 имеет опорную пластину 26, каждая из которых лежит на днище соответствующего вертикального гидроцилиндра 5 с возможностью скольжения по нему. Для обеспечения скольжения пластина 26 или днище цилиндра 5 смазаны смазочным материалом. Опорный бащмак 27 также служит и для крепления гидроцилиндра 5 к раме 1 при помощи пружины 28, которая одним концом закреплена на раме, а другим - на бащмаке 27, и за счет щарнирной связи в точке 31 со щтоком 30 гидроцилиндра 6, соединенного с рамой 1. Такое нежесткое крепление позволяет гидроцилиндру 5 беспрепятственно поднимать и опускать угол рамы 1 на требуемую величину, а гидроцилиндру 6 - перемещать этот угол в горизонтальной плоскости. Устанавливать раму 1 на перекрытие необязательно в какой-либо строго заданной начальной точке, лишь бы она была расположена между лазерами 33 и 34 и контрольными фотоэлементами 36 и 37 соответственно. После включения лазеров 33, 34 рама 1 автоматически устанавливается в проектное положение по осям, которыми служат узкие световые лучи. Это происходит следующим образом. Луч лазера воздействует на передний по отношению к лазеру 33 фотоприемник 7, закрепленный в передней части рамы 1 возле стойки 4. Если луч попадает на фотоэлемент 9, в последнем возбуждается электрический сигнал, который усиливается в усилителе 17 и через реле 18 подается на электромагнитный включатель 19. Включатель 19 включает соответствующий кран золотникового гидрораспределителя 23, который подает давление рабочей среды, нагнетая гидронасосом 25, в верхнюю часть вертикально установленного гидроцилиндра 5. Днище гидроцилиндра 5 взаимодействует с соответствующей стойкой 4 через пластину 26 и, поднимаясь, перемещает вертикально вверх соответствующий угол рамы 1 до тех пор пока фотоприемник 7 не достигнет такого положения, в котором световой луч будет попадать в щель 11, проходя ниже фотоэлемента 9. Как только луч перестает попадать на фотоэлемент 9, включатель 19, связанный с ним, отключает гидрораспределитель 23, и гидроцилиндр 5 прекращает вертикальное перемещение стойки 4. Таким образом, данный угол рамы 1 устанавливается в проектное положение по высоте. Если же луч попадает на фотоэлемент 10, то возбуждаемый в нем электрический сигнал усиливается в усилителе 20 и через реле 21 подается на электромагнитный включатель 22, который под действием этого командного сигнала включает другой кран гидрораспределителя 23. Теперь давление рабочей среды подается в нижнюю часть гидроцилиндра 5, который, опускаясь, будет опускать стоящую на нем стойку 4 до тех пор, пока световой луч не попадает в прозрачную щель 11. Тогда в электроцепи, соединяющей фотоэлемент 10 с включателем 22, исчезает командный сигнал, гидрораспределитель 23 выключается, силовой гидроцилиндр 5 останавливается, и угол рамы 1 остается в проектном положении по высоте. При прохождении сквозь прозрачную щель 11 световой луч попадает на задний фотоприемник 7 .выполненный аналогично фотоприемнику 7 и установленный соосно ему. При этом соответствующий гидроцилиндр 5, по командному электросигналу фотоэлементов, устанавливает задний угол рамы 1 в проектное положение по высоте. Световой луч, беспрепятственно проходя сквозь прозрачные щели фотоприемников 7 и 7, попадает на контрольный фотоэлемент 36, и возбуждаемый в нем электросигнал включает зеленую лампочку, сигнализируя о том, что оба угла одной стороны рамы 1 подняты на проектную высоту. Луч лазера 34 принимает квадратный фотоприемник 8, установленный на переднем по отнощению к лазеру 34, углу рамы 1. В зависимости от того, на какой сектор фотоприемника 8 попадает луч, происходит перемещение этого угла в вертикальном направлении или горизонтальное перемещение всей передней части рамы 1 в плоскости, перпендикулярной к направлению луча. Происходит это следующим образом. Как уже было сказано выше, фотоэлементы, из которых состоят фотоприемники 8 и 8, выполнены в виде четырех треугольных секторов, сходящихся вершинами к центральному отверстию 16. При этом секторы 12 и 13 электрогидравлической цепью соединены с соответствующим гидроцилиндром 5 аналогично соединению с таким же цилиндром фотоэлементов 9 и 10 фотоприемника 7. Таким же точно образом с силовыми гидроцилиндрами 6 горизонтального перемещения соединены секторы 14 и 15, только в данном случае гидрораспределитель 23 одновременно управляет двумя гидроцилиндрами 6 передней части рамы 1. При попадании светового луча на сектор 14 фотоприемника 8 возбуждаемый командный эл. сигнал включает соответствующий гидрораспределитель 23, который подает давление в расположенные в передней части рамы 1 два гидроцилиндра 6 так, чтобы оба штока 30 одновременно двигались в одну сторону. Поскольку гидроцилиндры 6 закреплены на нижней части рамы 1, а штоки 30 связаны свободными концами с неподвижными соответствующими башмаками 27 гидроцилиндров 5, то при перемещении штоков 30 обе пластины 26 начинают скользить по смазанным поверхностям днищ гидроцилиндров 5. Тем самым вся передняя часть рамы 1 перемещается горизонтально в плоскости, перпендикулярной к направлению светового луча, до тех пор пока луч не попадает в отверстие 16 фотоприемника 8 или не перейдет на сектор 12 или 13. Во всех случаях передние гидроцилиндры 6 прекращают работы. Если луч попадает на сектор 12 и или 13, то включается гидроцилиндр 5, расположенный под стойкой 4, около которой закреплен фотоприемник 8 и производится регулировка данного угла рамы 1 по высоте до тех пор, пока световой луч не попадает на прозрачное отверстие 16. В этом положении ни один из фотоэлементов 12, 13, 14 и 15 не возбуждает командный сигнал и данный угол рамы 1 находится в проектном положении по высоте, а вся передняя часть рамы 1 оказывается установленной как по высоте, так и в плане, в проектном положении. Проходя сквозь отверстие 16, луч попадает на фотоприемник 8 и задняя часть рамы 1 аналогичным образом автоматически устанавливается в проектное положение.
Процесс автоматического установления в проектное положение левого и правого углов передней части рамы 1 происходит одновременно. Автоматическая же установка каждого из задних углов рамы 1 начинается только после прекращения аналогичного процесса соответствующего переднего угла, поскольку только при попадании переднего угла рамы 1 в проектное положение луч сможет пройти сквозь щель 11 или отверстие 16, размеры которых выбирают согласно допусков на отклонение при монтаже строительных конструкций (по СНИПу). И только в случае установки всех четырех углов рамы 1 в проектное положение, как по высоте, так и в поперечной плоскости относительно луча, оба световых луча попадают на контрольные фотоэлементы 36 и 37 соответственно. Загоревшиеся обе контрольные зеленые лампочки сигнализируют о том, что кондукторная рама установлена в проектное положение по высоте и по продольным осям.
В случае необходимости точного установления кондукторной рамы 1 по поперечной начальной оси, идущей вдоль торца здания, на выносном кронштейне, установленном на раме 32, можно закрепить дополнительный лазер, луч которого будет направлен вдоль поперечной оси здания, а на одном из передНИХ, по отношению к раме 32, углов рамы I установить фотоприемник, состоящий из двух четырехугольных фотоэлементов, разделенных вертикальной прозрачной щелью, ,каждый из фотоэлементов вышеописанным
способом соединить с исполнительным механизмом перемещения рамы 1, аналогичным гидроцилиндру 6, по воздействующему на раму 1 по направлению продольной оси здания. Однако это может сильно загромоздить кондукторную раму и усложнить работу системы. Проще поставить раму 1 приблизительно возле поперечной оси и при установке панели слегка подать последнюю, пока та на весу, только до проектной отметки. Это касается только первой от угла здания панели, а остальные панели автоматически поД страиваются к ней, причем для выдерживания положенного зазора между панелями можно использовать шаблон-прокладку. После этого стеновая панель краном подается под вилочные захваты 2 и устанавливается
0 нижней частью на опоры 3, панель прижимается своей плоскостью к раме 1 и вилочные захваты 2 захватывают верх панели и фиксируют его. Поскольку вся кондукторная рама 1 выверена в проектном положении по высоте, то опоры 3 фиксируют низ панели в проектном положении по высоте, одновременно рама 1 выставлена и по продольным осям, и если низ панели прижат к боковой части рамы 1, а ее верх зафиксирован вилочным захватом, то и панель автоматичесJ ки оказывается в проектном положении. На одну кондукторную раму 1 можно установить несколько панелей, причем все они автоматически оказываются в проектном положении.
Такое выполнение кондуктора позволяет
5 автоматизировать установку стеновых панелей в проектное положение при монтаже крупнопанельных зданий, что значительно ускоряет процесс монтажа при одновременной гарантии высокой точности установки панелей за счет использования лазерных источников света.
Выверка направления продольных осей здания, каковыми являются лазерные лучи и высоты их расположения, производится только один раз, после чего можно в ряд
5 установить несколько кондукторых рам, которые автоматически выстанавливаются в проектное положение, что также ускоряет контактные работы за счет избежания необходимости выверки вручную каждой вновь устанавливаемой кондукторной рамы или при переносе этой рамы вдоль продольной оси здания на новое место монтажа.
Наличие контрольных фотоэлементов, связанных с источниками световых или звуковых сигналов, позволяет оператору постоянно иметь информацию и правильности направления лазерного луча, а значит и о правильности выверки кондукторной рамы, по которой ориентируются в пространстве стеновые панели.
Формула изобретения
1. Кондуктор для монтажа строительных конструкций, содержащий раму с опорными стойками и фотоприемниками, связанными с источником света, и механизмы вертикального и горизонтального перемещения рамы, электрически связанные с фотоприемниками, отличающийся тем, что, с целью обеспечения возможности автоматизированной установки в проектное положение стеновых панелей и непрерывности контроля выверки, рама выполнена в виде четырехугольного объемно1 о каркаса, имеющего захваты для панелей и опоры для них, а фотоприемники установлены на торцовых сторонах каркаса попарно и на одном уровне, соответствующем уровню источника света, причем фотоприемники противолежащих сторон каркаса соосны друг другу, а механизмы вертикального и горизонтального перемещения рамы выполнены в виде силовых цилиндров, один из которых установлен вертикально под рамой и соединен с ней гибкой связью, другой установлен под рамой горизонтально, и щток его щарнирно соединен с первым цилиндром.
2. Кондуктор по п. 1, отличающийся тем, что один из соосных фотоприемников выполнен в виде прямоугольных фотоэлементов, установленных друг над другом с образованием зазора, а другой - в виде квадратных фотоэлементов с отверстием по их центру.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 165875, кл. Е 04 В 1/02, 1962.
2.Авторское свидетельство СССР
№ 254747, кл. Е 04 G 21/18, 1968 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Кондуктор для монтажа строительных конструкций | 1982 |
|
SU1035173A1 |
| Устройство для монтажа панельных зданий и сооружений | 1977 |
|
SU749999A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ПАНЕЛЬНЫХ БЛОКОВ | 2003 |
|
RU2252304C2 |
| СПОСОБ БЕЗВЫВЕРОЧНОГО МОНТАЖА МОДУЛЬНЫХ СТЕНОВЫХ ПАНЕЛЕЙ КАРКАСНОГО ЗДАНИЯ | 2013 |
|
RU2558880C2 |
| Устройство для монтажа строительных конструкций | 1974 |
|
SU634010A1 |
| Установка для монтажа крупнопанельных зданий | 1987 |
|
SU1418448A1 |
| Кондуктор для монтажа вертикальных строительных элементов | 1988 |
|
SU1530722A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ МОНТАЖА СТРОПИЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2305738C1 |
| УСТРОЙСТВО для ВЫВЕРКИ СТРОИТЕЛЬНЬ[Х КОНСТРУКЦИЙ | 1969 |
|
SU254747A1 |
| СПОСОБ ВОЗВЕДЕНИЯ ЖИЛЫХ И ПРОИЗВОДСТВЕННЫХ ЗДАНИЙ ИЗ СТЕНОВЫХ КАМНЕЙ И СТЕНОВЫХ ЖЕЛЕЗОБЕТОННЫХ ПАНЕЛЕЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2360075C2 |

23
22
.5
II II
Iff 22
19
lu
I
6
db
P4l.i
