1
Изобретение относится к машиностроению и предназначено для использования в приводных системах, например радиотелескопов, к которым предъ- с являются требования высокой нагрузочной способности и безлюфтовки.
Известен поворотный механиЭм с устройством для выборки зазора в зацеплении элементов зубчатых передач, Ю содержащий упругий элемент и привод, включающий двигатель и пару сооснр установленных, взаимодействующих с ведомым зубчатым колесом зубчатых колес, одно из которых жестко связано 5 с выходным взлом двигателя,а второе установлено с возможностью поворота относительно него и связано с одним из упругих элементов ,
Недостатком этого устройства яв- 20 чяется относительно небольшая нагрувочная способность.
Наиболее близким к предлагаемому является поворотный механизм тяжелогрузной платформы, содержащий упру- 25 гие Элементы и приводы, каждый из которых включает двигатель и пару соосно установленных и взаимодействующих с зубчатым колесом платформы зубчатых Колес, одно из которых жестко связано30
с выходным валом двигателя, а второе установлено с возможностью поворота относительно него и связано содним из упругих элементов .
Недостатком этого привода является небольшая долговечность механизма и относительно небольшой общий КПД приводов за счет повышенных нагрузок в заце плениях. Так, для полного устранения люфта требуется заводка упругого элемента порядка 1,2-1,5 максимального усилия, что создает нагрузку на нерабочих (тыльных) профилях зубьев, равную 1,2-1,5, а на рабочих профилях 2,2-2,5 максимального полезного усилия. КПД приводов ухудшается за счет постоянно цнркулирукядих паразитных мощностей, равных 1,2-1,5 максимальной полезной мощности.
Цель изобретения - повышение долговечности механизма и увеличение общего КПД приводов.
Указанная цель достигается тем, что одна половина вторых колес подпружинена по часовой стрелке, а другая - против.
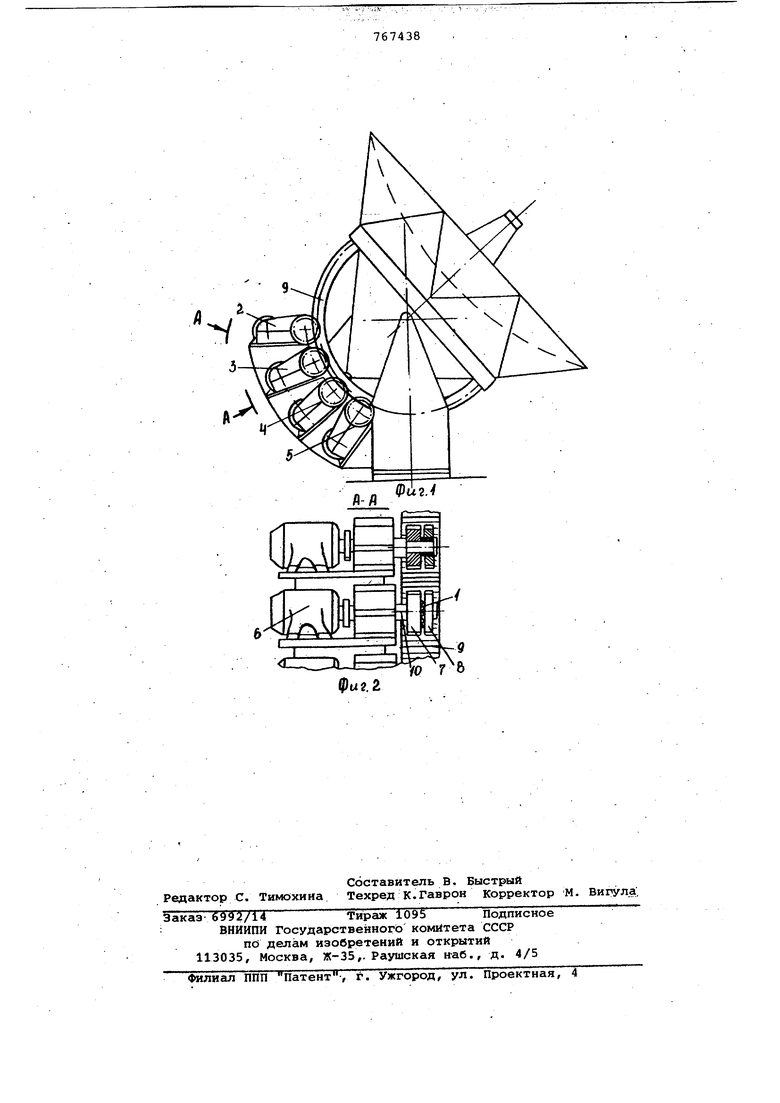
На фиг. 1 изображена кинематическая схема предлагаемого поворотного механизма тяжелогрузной платформы; на фиг. 2 - разрез А-А на фиг. 1. Поворотный механизм тяжелогрузной платформы содержит упругие элементы 1, выполненные, например, в виде пру жины или торсиона, и приводы 2-5, .ка дый из которых включает двигатель 6 и пару соосно установленных зубчатых колес 7, 8. Зубчатое колесо (или сек тор платформы) 9 взаимодействует с зубчатыми колесами 7, 8 одно из кото рых 7 жестко связано с выходным валом 10 двигателя б, а второе 8 установлено с возможностью поворота отно сительно него, второе колесо 8 также связано с упругим элементом 1. Упругие элементы 1 размещены на поворотном механизме таким образом, что одна половина вторых колес 8 подпружинена по часовой стрелке, а другая половина - против часовой стрелки. Поворотный механизм работает следующим образом. Упругие элементы 1 создают усилие закрутки на одной половине вторых колес 8 (приводы 2 и 4) по часовой стрелке, а на другой половине (приво ды 3 и 5)- против. От двигателя 6 вращательное движение через колеса 7,8 передается зубчатому колесу 9 (или сектору) платформы. В работе поворотного механизма могут наблюдаться три случая. Случай 1. Суммарное статическое усилие, действующее на шестерни 7 и 8,меньше суммарного усилия всех упругих элементов 1 (приведенного к этим же шестерням). Основная часть д намического усилия любого направлени воспринимается в этом случае главным образом шестернями 7, жестко связан ными с валом 10 электродвигателя б, а значит, люфт не возникает. Случай 2. Суммарное статическое усилие равно суммарному усилию всех упругих элементов или превышает его не более чем на половину (т.е. не бо лее чем на 1/3 максимального динамического усилия). В этом случае шестерни 7 приводов 2 и 4 контактируют с колесом рабочими (правыми) профиля ми зубьев, шестерни 8 приводов 3 и 5 - нерабочими (левыми) профилями зубьев. В то-же время под действием стати ческой нагрузки упругие элементы 1 приводов 3, 5 закручиваются, и обе шестерни 7 и 8 вступают в контакт с зубьями колеса 9 рабочими профилями. При действии динамической нагрузки, совпадающей по направлению со статической, характер контакта не меняется, при противоположном направлении разность между динамической и статической нагрузкой (составляющая в это случае не более 1/3 максимальной динамической нагрузки) воспринимается шестернями 8 приводов 2 и 4, суммарная заводка упругих элементов которых больше этой разности, т.е. люфт и в этом случае не возникает. Случай 3. Суммарное статическое усилие превышает суммарное усилие упругих элементов 1 более чем наполовину, в этом случае шестерня 7 приводов 2 и 4 и шестерни 7 и 8 приводов 3 и 5 контактируют с колесом 9 рабочими профилями зубьев. Характер контакта не меняется, а, следовательно, люфт не .возникает при любом направлении динамической нагрузки. Таким образом, привод обеспечивает отсутствие люфта при любом характере нагрузки..При этом общая циркулирующая в зацеплениях паразитная мощность составляет всего 7-14% от максимальной полезной, что в 10-20 раз меньше, чем в традиционных конструкциях с заводкой упругого элемента, равного 1,2-1,5 максимального полезного усилия. Во столько же раз уменьшается и усилие контакта нерабочих (тыльных) профилей зубьев шестерен. . При этом максимальное усилие в контакте рабочих профилей зубьев снижается более, чем в 2 раза. В результате достигается более высокий КПД, меньший износ рабочих поверхностей зубьев и больший ресурс работы, чем в известных конструкциях. Формула изобретения Поворотный механизм тяжелогрузной платформы, содержащий упругие элементы и приводы, каждый из которых включает двигатель и пару соосно установленных, взаимодействующих с зубчатым колесом платформы з.убчатых колес, одно из которых жестко связано с выходHbiM Всшом двигателя, а второе установлено с возможностью поворота относительно него и связано с одним из упругих элементов, отличающийся тем, что, с целью повышения долговечности механизма и увеличения общего КПД приводов за счет снижения нагрузок в зацеплениях, одна половина вторых колес подпружинена по часовой стрелке, а другая - против. Источники информации, принятые во внимание при эксйертизе .1. Авторское свидетельство СССР 199616, 1966. . 2. Целиков А. И. и др. Опыт применения редукторов-сумматоров в металлургическом машиностроении. - Вестник машиностроения, 1971, 6, с. 30-33 (прототип).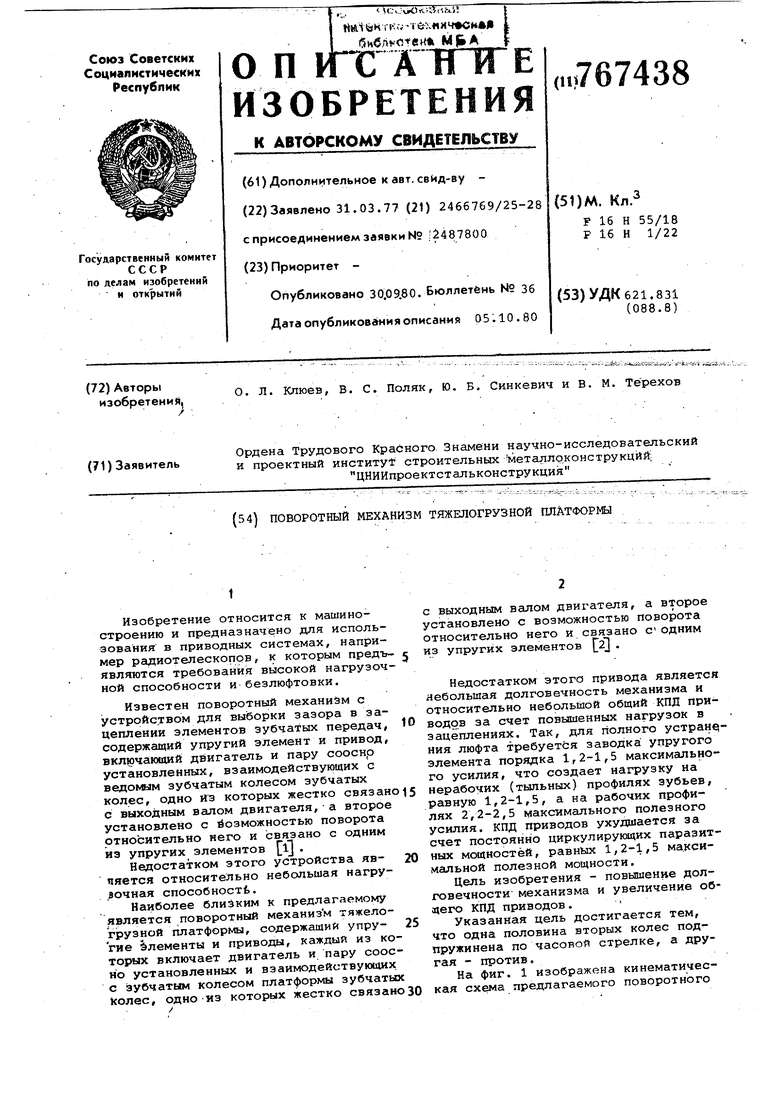
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2014 |
|
RU2547669C1 |
| ШЕСТЕРЕННЫЙ ВАРИАТОР | 2007 |
|
RU2342574C2 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2678397C1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2018 |
|
RU2789364C1 |
| КОЛЕСО С ГИБКИМ ЗУБЧАТЫМ ВЕНЦОМ | 2013 |
|
RU2606192C2 |
| ВЕТРОДВИГАТЕЛЬ | 1994 |
|
RU2095620C1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2604252C2 |
| Привод безлюфтового вращения | 1989 |
|
SU1789041A3 |
| СПОСОБ СОГЛАСОВАНИЯ КРУТЯЩИХ МОМЕНТОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И НАГРУЗКИ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ И БЕССТУПЕНЧАТАЯ АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2169277C1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1988 |
|
RU2044608C1 |