(54) СТОСОБ КОНТРОЛЯ РЕЛЬСОВОЙ ЦЕПИ
1
Изобретение относится к рельсовому транспорту и может быть использовано для контроля состояния путевых изолированных участков.
Наиболее близким по технической 5 сущности к предлагаемому изобретению является способ контроля рельсовой цепи, по которому на питающем конце в рельсовую цепь подают управляющий сигнал, а на приемномконце измеряют 10 напряжение, ток и сдвиг фаз между ними. Результаты измерений сравнивают с допустимыми значениями указанных параметров и по результату сравнения формируют сигнал о свободности 15 или занятости рельсовой цепи pTJ .
Недостатком известного способа контроля является то, что путевой приемник рельсовой цепи не различает причин уменьшения в нем тока, поэто-20 му при загрязнении балласта, изменении атмосферных условий, а также при увеличении сопротивления рельсов путевой приемник обесточивается , выдавая ложную информацию о занятости 25 участка. Шунтовая чувствительность. известной рельсовой цепи в условийх резких колебаний проводимости изоляции недостаточно высока, что приводит к случаям потери шунта и появ- 30
лению ложной свободности при завышенном переходном сопротивлении колесорельс. Следовательно, точность контроля рельсовой цепи по известному способу недостаточно высока.
Целью изобретения является повышение точности контроля.
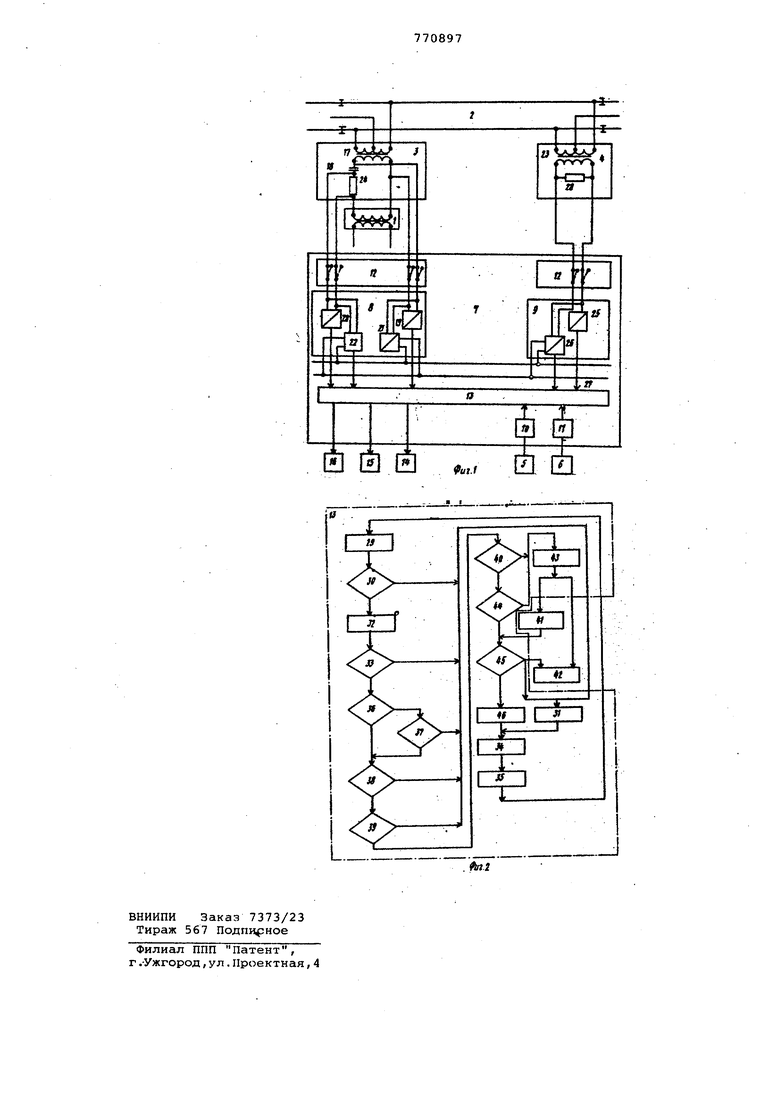
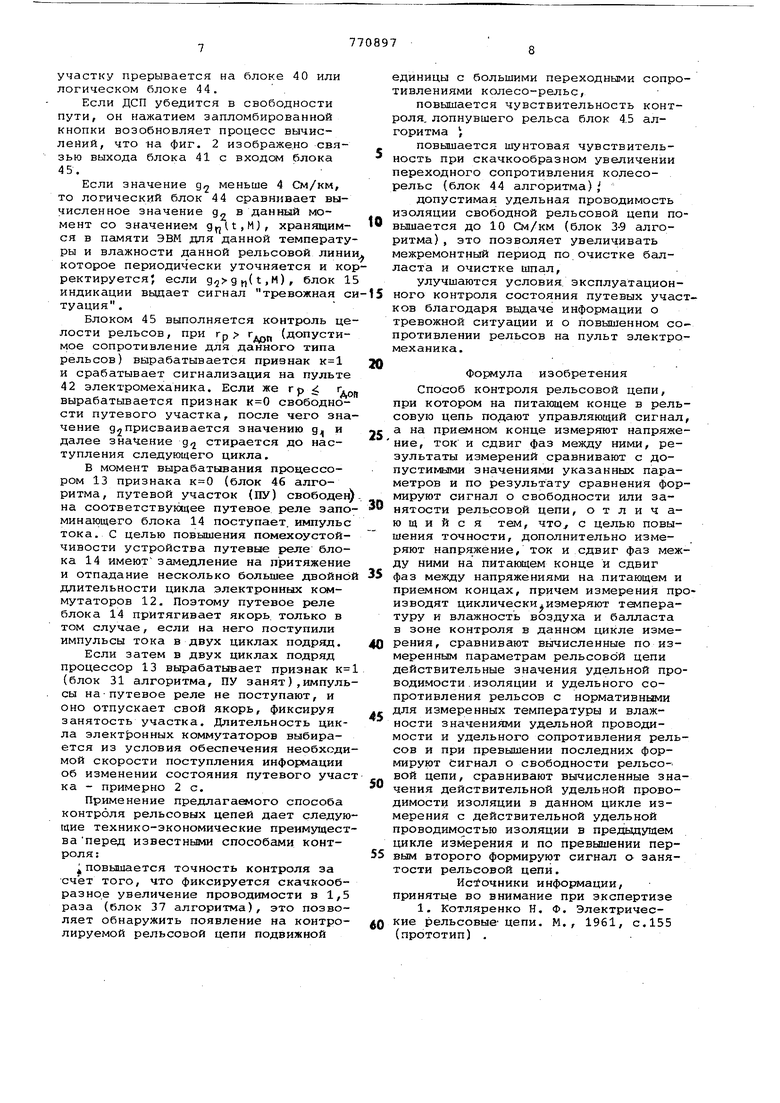
Цель достигается тем, что по предлагаемому способу дополнительно измеряют напряжение, ток и сдвиг фаз между ними на питающем конце и сдвиг фаз между напряжениями на питающем и приемном концах, причем измерения производят циклически, измеряют температуру и влажность воздуха и балласта в зоне контроля в данном цикле измерения, сравнивают вычислен- ные по измеренным параметрам рельсовой цепи действительные значения удельной проводимости изоляции и удельного сопротивления рельсов с нормативными для измеренных температуры и влажности значениями удельной проводимости и удельного сопротивления рельсов и при превышении последних формируют сигнал о свободности рельсовой цепи, сравнивают вычисленные, значения действительной удельной проводимости изоляции в данном цикле измерения fc действительной удельной проводимостью изоляции в предьщущем цикле измерения и по превьЕиении первым второго формируют сигнал о занятости рельсовой цепи. На фиг. 1 показан пример реализации способа контроля рельсовой цепи переменного тока на фиг. 2 алгоритм работы процессора электронноЯ вычислительной машины. Па фиг. 1 показаны источник 1 питания, рельсовые линии 2, согласующий блок 3 для согласования источника 1 питания с рельсовыми линиями и согласующий блок 4 для согласования аппаратуры приемных концов с рельсовыми линиями, датчик 5 температуры и датчик б относительной влажности в зоне контроля, электронная вычислит тельная машина 7 с блоками 8 и 9 пре образователей аналог-код для преобразования аналоговых величин напряжения, токов и фазовых соотношений между напряжениями и токами соответственно на питающих на приемных кон цах рельсовых линий, с преобразователями 10 и 11 значений температуры и относительной влажности в цифровые коды, с электронными кся.1мутаторами 12 для поочередного подключения измерительных выходов согласующих блоков питающих и приемных концов ряда рельсовых линий к преобразователям аналог-код, с процессором .13 для определения состояния Путе- вых участков, специальный запсминаш щий блок 14 для запоминания состоян путевых участков, блок 15 индикации на пульте дежурного по станции и бл 16 индикации на пульте электромеханика, причем согласукщий блок 3 каж дой рельсовой цепи содержит дроссел трансформатор 17 и кон 1енсатор 18 д настройки в резонанс аппаратуры питающего конца. Блок 8 преобразователей аналогкод содержит преобразователи 19 напряжение-код, 20 ток-код, 21 фаза напряжения-код и 22 фаза тока-код. Фазы напряжения и тока определяются .относительно фазы опорного напряжения UQ . Согласующий блок 4 содержит дрос сель-трансформатор 23, согласующий блок 3 - резистор 24 с сопротивлени RO, а блок 9 преобразователей - пре образоратели 25 и 26 соответственно напряжения в код и фазыв код. На фиг.1 показана шина 27 опорного напряжения U- . Способ контроля рельсовой цепи ос ествляют следующим образом. Напряжение от источника 1 питани через .согласующий блок 3 подают в р . совую линию 2. С измерительного потенциального выхода согласующего бл ка 3 снимают aHaj roBoe значение на пряжения иц в начале рельсовой лин а с измерительного токового выхода блока 3 снимают аналоговое значение тока в начале рельсовой линии в виде падения напряжения 1ц Яд известием значении активного сопротивления резистора 24. Напряжения й и i| Rg подают соответственно на потенциальный и токовый входы электронного коммутатора 12 вычислительной машины 7. Аналогично на другие пары входов., коммутатора 12 подают напряжения ujj и l RQ со всех остальных п-1 рельсовых линий. Электронный коммутатор 12 производит поочередное подключение измерительных выходов согласующего блока 3 к блоку преобразователей 8 аналогкод, и с выходов блока преобразователей 8 цифровые коды поступают в процессор 13 электронной вычислительной машины 7 (ЭВМ). Напряжение ii в конце рельсовой линии снимают с активного сопротивления резистора 28 в согласующая блоке 4 и подают через электронный коммутатор 12 и преобразователь 25 блока 9 в виде цифрового кода в процессор 13 электронной вычислительной машины. Аналогично, как и на питающем конце, измеряют, преобразуют и передают цифровой код фазы напряжения U1 с помощью преобразователя 26 аналогкод относительно опорного напряжения UQJ,- шины 27. , Значение вектора тока I в конце рельсовой линии определяют с помощью процессора 13 операцией деления значения иц на .известное постоянное значение Rj резистора 28. . . На о.сновании полученных цифровых кодов напряжений, токов и фаз с помощью процессора 13 ЭВМ 7 рассчитывают первичные параметры данной рельсовой линии. Расчет производят по следующей методике . По измеренным векторным значениям UH. н и и I.K определяют напряжение и ток УН и J 4 в начале рельсовой линии и UK и IK в конце по формулам: и Он- н-Ви- н ,,, .-с„и;м - н- U A..i , где Ац, Вц, Сц, DH-коэффициенты четырехполюсника дроссель-трансформатора в начале рельсовой линии (на питающем конце); , В, С Оц- то же, в конце рельсовой линии (на приемном конце). Эти коэффициенты заранее определяют и вносят в долговременную память ЭВМ 7. ,., По рассчитанным и„ . 1 ik ц определяют волновое сопротивление Z и постоянную распространения у по следующим формулам, U.IH-U л П П К rv ин1к ии-1к 1к-л1сЬ Т . K (ch2fe+ich2 e-( (5) где - длина рельсовой линии, записанная в долговременной памяти ЭВМ 7. По найденным Z и jf рассчитываются первичные параметры рельсовой линии. Zgy Zp-|Zp|e (pp.J6oL) (6) Уи 1Уи1е (H + (г где ZP - комплексное сопротивление рельсов по петле. Ом/км, Гр - активное сопротивление рель сов по петле Ом/км, L - индуктивность рельсовой пет ли. Г/км (i - угол сдвига фаз между током и напряжением на релейном конце рельсовой цепи, (f - угол сдвига фаз между токсад и напряжением на питаклцем А конце рельсовой цепи, у - комплексная проводимость из ляции между рельсами. См/км 6jj - активная проводимость изоля ции между рельсамиJСм/км, С - емкость ме;кду рельсами, Ф/к Вычисленные значения гр и д находятся в оперативной памяти ЭВМ. Кроме вьпшсленных параметров в пр цессор ЭВМ поступают цифровые коды температуры и влажности от датчиков 5 и 6 температуры и влажности. Алгоритм контроля состояния путевого участка реализуют следующим образом: значения напряжения, токов и фазовых соотношений в начале и конце рельсовой линии 2 путевого участка с выходов блоков В и 9 преобразователей поступают в блок 29 ввода исходных данных (фиг. 2) процессора 13. Логическим блоком 30 осуществляю контроль на сход стыков путем сравнения угла сдвига фаз между напряжением в начале и в конце путевого участка с предельно допустимым задан ным углом if/2, блок 31 вырабатывает признак K;|tl занятости путевого участ ка. Блоком 32 выполняется вычисление удельной проводимости изоляции и удельного сопротивления рельсов рель совой линии по формулам (1)-(7) на основании результатов измерения на-/ пряжений, токов и фаз в начале и кон це рельсовой линии (РЛ): кроме того, блоком 32, вычисляются и два других первичных параметра РЛ: индуктивность L и емкость С. Логическим блоком 33 проверяется наличие данных о проводимости изоляции g для предыдущего цикла. При отсутствии данных о проводимости изоляции д выдается признак эанятосзти путевого участка. Эта проверка выполняется для того, чтобы при первом цикле после включения ЭВМ 7 не выполнялись последуклдие логические операции, так как значение д еще не занесено в память ЭВМ Блоком 34 значению д присваивается значение ди и в блоке 35 значение 9,2 стирается до следующего цикла. Если значение О в последующем цикле записано, то блоком 36 выполняется контроль занятости путевого участка по признаку , при свободном путевом участке блоком 37 осуществляется контроль занятости путевого участка по признаку увеличения проводимости изоляции за один цикл. Из выполненных исследований установлено, что причиной увеличения проводимости изоляции больше, чем в 1,5 раза за 1 цикл, является, как правило, занятие участка пути подвижной единицей и в редких случаях,повреждение изоляции рельсовой линии, измеренной в текущем цикле, если отнсшение 92/g, превышает 1,5, выдается признак . Блоком 38 выполняется контроль исправности каналов связи от рельсовой линии до ЭВМ 7, если хотя бы одна из , измеренных величин напряжения или тока равна нулю, т.е. по каким-либо причинам информация не поступила, то вырабатывается признак . Блоком 39 выполняется контроль на занятость путевого участка по признаку рассчитанной удельной.приводимое- ти изоляции; если проводимость 2. .10 См/км, вырабатывается признак . Блоком 40 осуществляется контроль на тревожную ситуацию: если См/км, процессор 13 выдает сигнал тревожная ситуация, который говорит о неопределенности состояния путевого участка. От сигнала тревожная ситуация, нормально вырабатывается признак . Окончательное решение о состоянии участка принимает дежурный по станции (ДСП). Для пояснения порядка реализации алгоритма на фиг. 2 наряду с блоками алгоритма представлены два технических устройства: пульт ДСП 41 и пульт 42 электромеханика и связи их с блоками алгоритма. Блок тревожная ситуация 43 является операционным блоком алгоритма, и с его выхода подается сигнал на пульты 41 и 42. При появлении сигнала тревожная ситуация процесс вычислений и логиеских операций по данному путевому участку прерывается на блоке 40 или логическом блоке 44. Если ДСП убедится в свободности пути, он нажатием запломбированной кнопки возобновляет процесс вычислейий, что на фиг. 2 изображено связью выхода блока 41 с входсм блока 45. Если значение д меньше 4 См/км, то логический блок 44 сравнивает вычисленное значение д„ в данный момент со значением gf,U.MJ, хранящимся в памяти ЭВМ для данной температу ры и влажности данной рельсовой лини которое периодически уточняется и ко ректируется если (t,M), блок 1 индикации вьвдает сигнал тревожная с туация. Блоком 45 выполняется контроль це лости рельсов, при гр Гдцд (допустимое сопротивление для данного типа рельсов) вырабатывается признак и срабатывает сигнализация на пульте 42 электромеханика. Если же гр гвырабатывается признак свободности путевого участка, после чего зна чение §2 присваивается значению д и далее значение д стирается до наступления следующего цикла. В момент вырабатывания процессором 13 признака (блок 46 алгоритма, путевой участок (ПУ) свободен на соответствующее путевое реле запо минающего блока 14 поступает, импульс тока. С целью повышения помехоустойчивости устройства путевые реле блока 14 имеют замедление на притяжение и отпадание несколько большее двойно длительности цикла электронных коммутаторов 12. Поэтому путевое реле блока 14 притягивает якорь, только в том случае, если на него поступили импульсы тока в двух циклах подряд. Если затем в двух циклах подряд процессор 13 вырабатывает признак к (блок 31 алгоритма, ПУ занят),импуль сы на-путевое реле не поступают, и оно отпускает свой якорь, фиксируя занятость участка. Длительность цик ла электронных коммутаторов выбирается из условия обеспечения необходи мой скорости поступления информации об изменении состояния путевого уча ка - примерно 2с. Применение предлагаемого способа контроля рельсовых цепей дает следу щие технико-экономические преимущес ва перед известными способами контроля:J, повышается точность контроля за счет того, что фиксируется скачкооб разное увеличение проводимости в 1, раза (блок 37 алгоритма), это позво ляет обнаружить появление на контро лируемой рельсовой цепи подвижной диницы с большими переходными сопротивлениями колесо-рельс, повышается чувствительность контроля, лопнувшего рельса блок 4.5 алгоритмаповышается шунтовая чувствительность при скачкообразном увеличении переходного сопротивления колесорельс (блок 44 алгоритма)i допустимая удельная проводимость изоляции свободной рельсовой цепи повышается до 10 См/км (блок 3-9 алгоритма) , это позволяет увеличивать межремонтный период по очистке балласта и очистке шпал, улучшаются условия эксплуатационного контроля состояния путевых участков благодаря выдаче информации о тревожной ситуации и о повышенном сопротивлении рельсов на пульт электромеханика. изобретения Способ контроля рельсовой цепи, при котором на питающем конце в рельсовую цепь подают управляющий сигнал, а на приемном конце измеряют напряжение, ток и сдвиг фаз между ними, результаты измерений сравнивают с допустимыми значениями указанных параметров и по результату сравнения формируют сигнал о свободности или занятости рельсовой цепи, отличающийся тем, что с целью повышения точности, дополнительно измеряют напряжение, ток и сдвиг фаз между ними на питаняцем конце и сдвиг фаз между напряжениями на питающем и приемном концах, причем измерения производят циклически измеряют температуру и влажность воздуха и балласта в зоне контроля в данно цикле измерения, сравнивают вычисленные по измеренным параметрам рельсовбй цепи действительные значения удельной проводимости . изоляции и удельного сопротивления рельсов с нормативными для измеренных температуры и влажности значениями удельной проводимости и удельного сопротивления рельсов и при превышении последних формируют Сигнал о свободности рельсовой цепи, сравнивают вычисленные значения действительной удельной проводимости изоляции в данном цикле измерения с действительной удельной проводимостью изоляции в предыдущем цикле измерения и по превышении первым второго формируют сигнал а занятости рельсовой цепи. Источники информации, приняты.е во внимание при экспертизе 1. Котляренко Н, Ф. Электрические рельсовые цепи. М., 1961, с.155 (прототип) .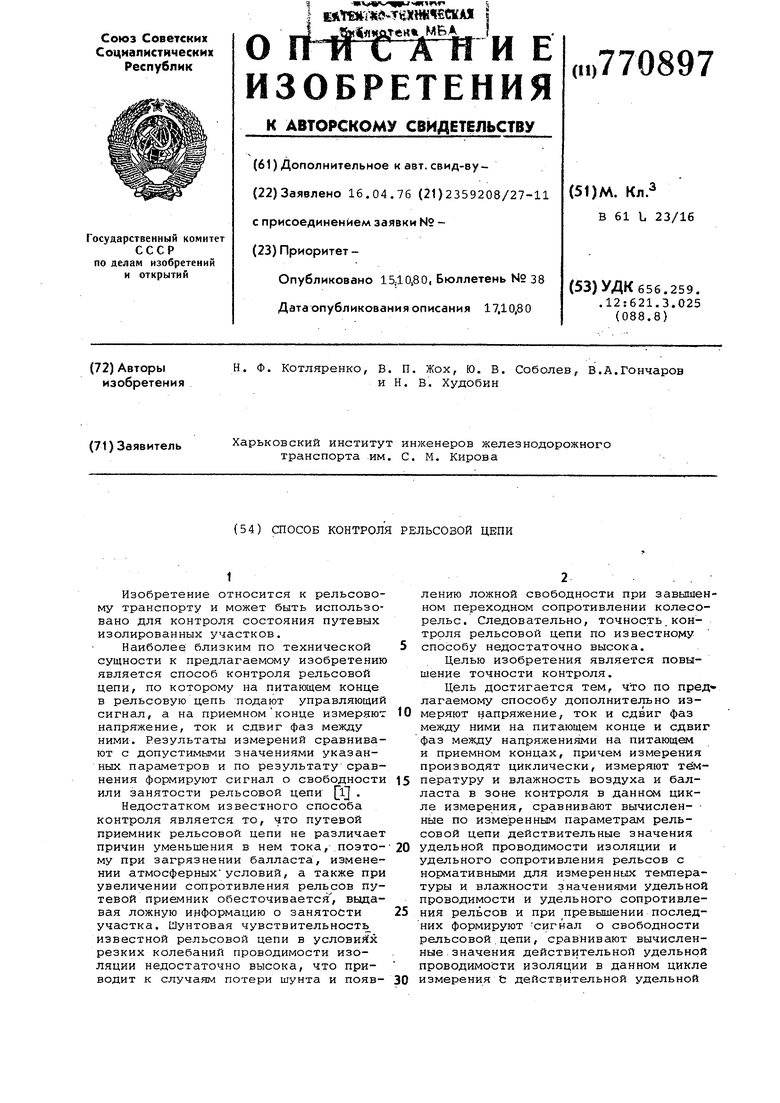
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2030316C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ РЕЛЬСОВЫХ ЛИНИЙ | 2017 |
|
RU2671604C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВОГО УЧАСТКА ДВУХЧАСТОТНОЙ РЕЛЬСОВОЙ ЦЕПЬЮ | 2017 |
|
RU2671605C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2007 |
|
RU2348559C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВОГО УЧАСТКА И ФАЗОЧУВСТВИТЕЛЬНАЯ РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2025362C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВОГО УЧАСТКА | 2019 |
|
RU2732933C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2423268C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2004 |
|
RU2273583C2 |
| РЕЛЬСОВАЯ ЦЕПЬ | 2005 |
|
RU2278046C1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬСОВОЙ ЛИНИИ | 2004 |
|
RU2278044C2 |