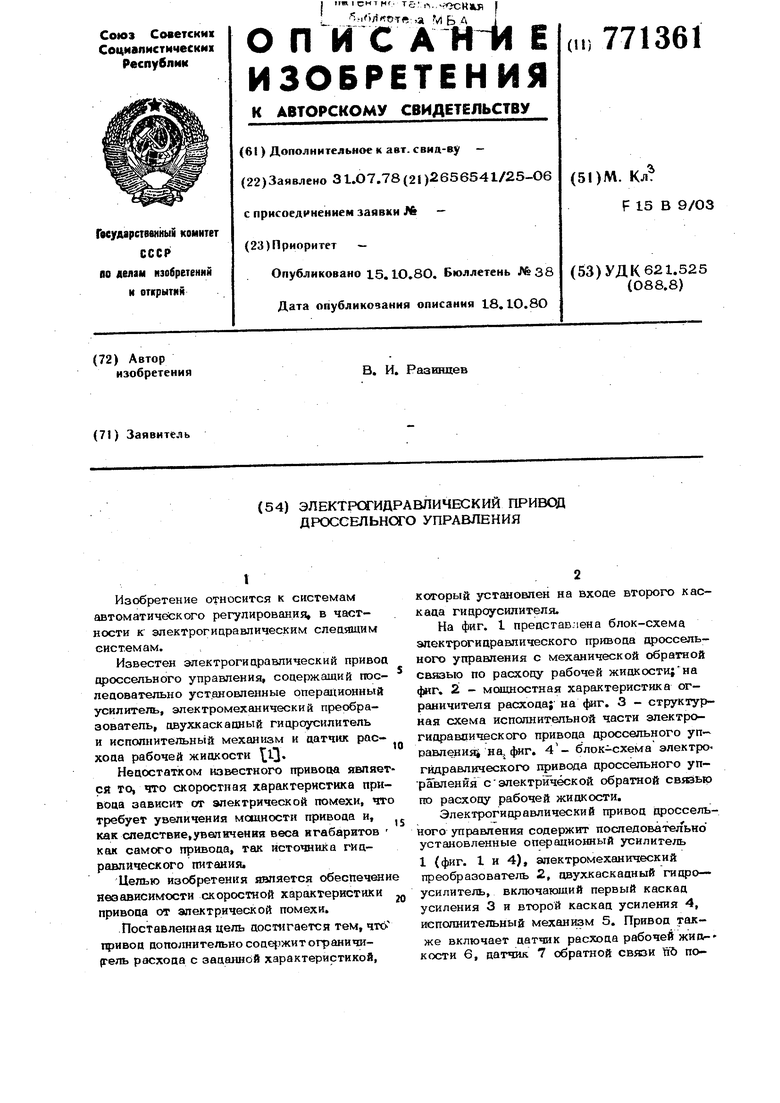
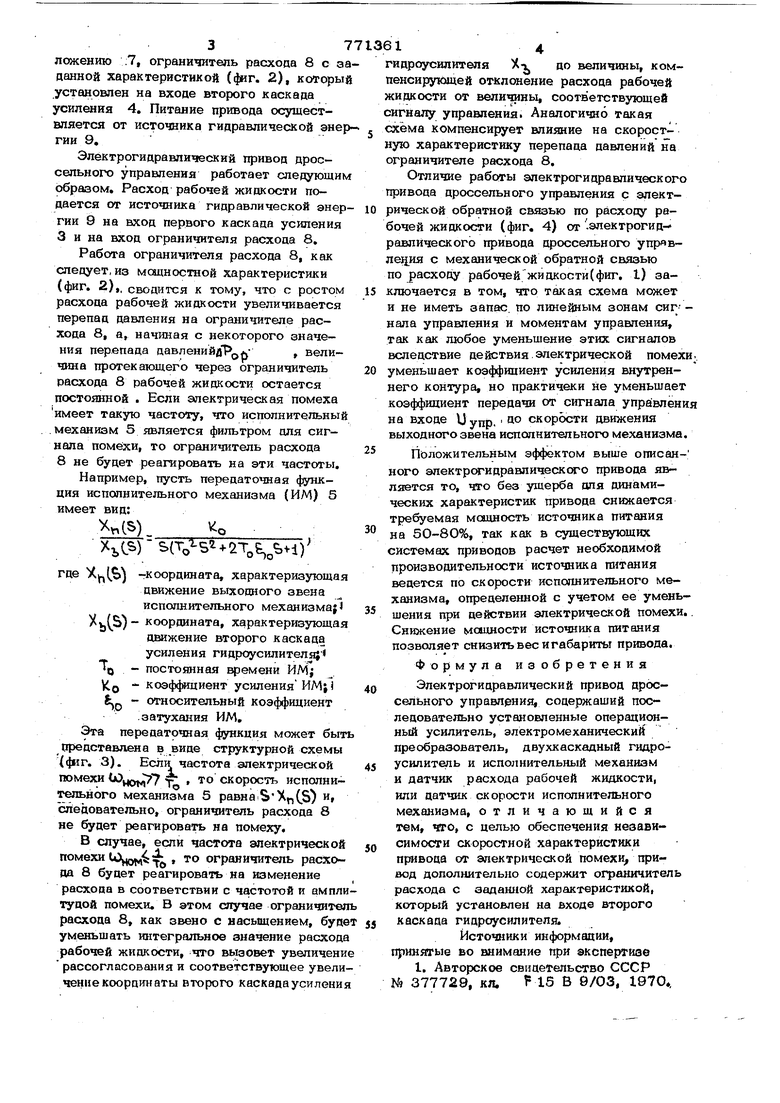
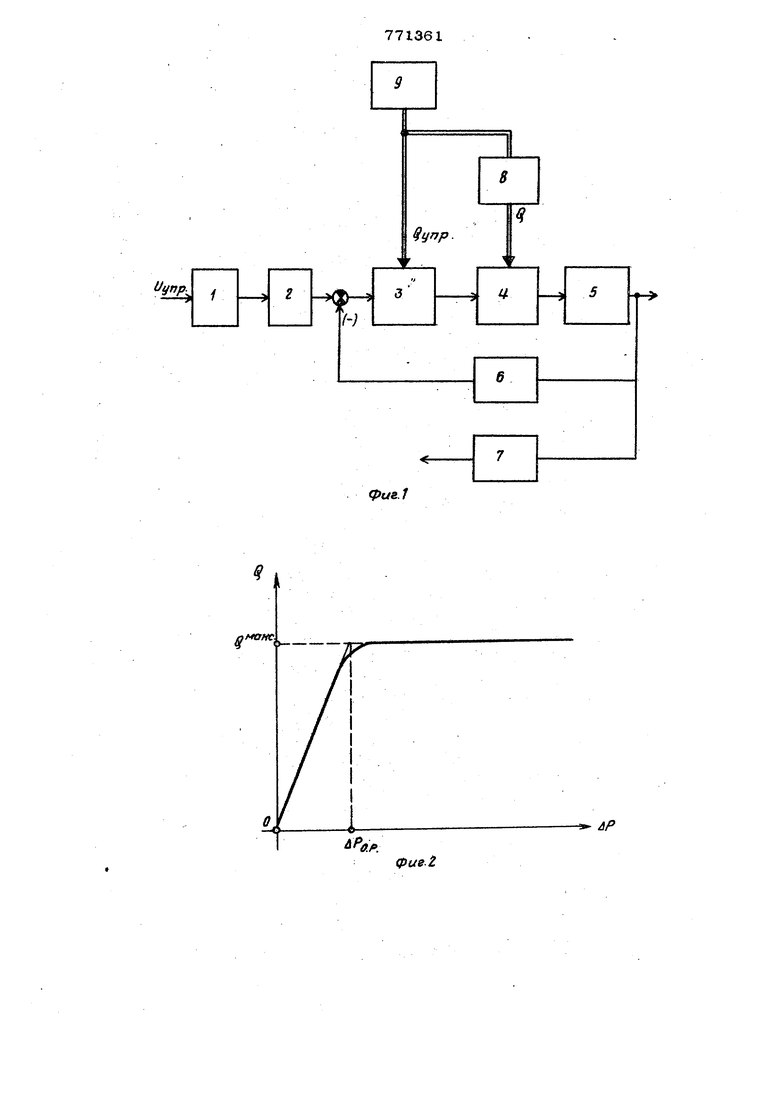
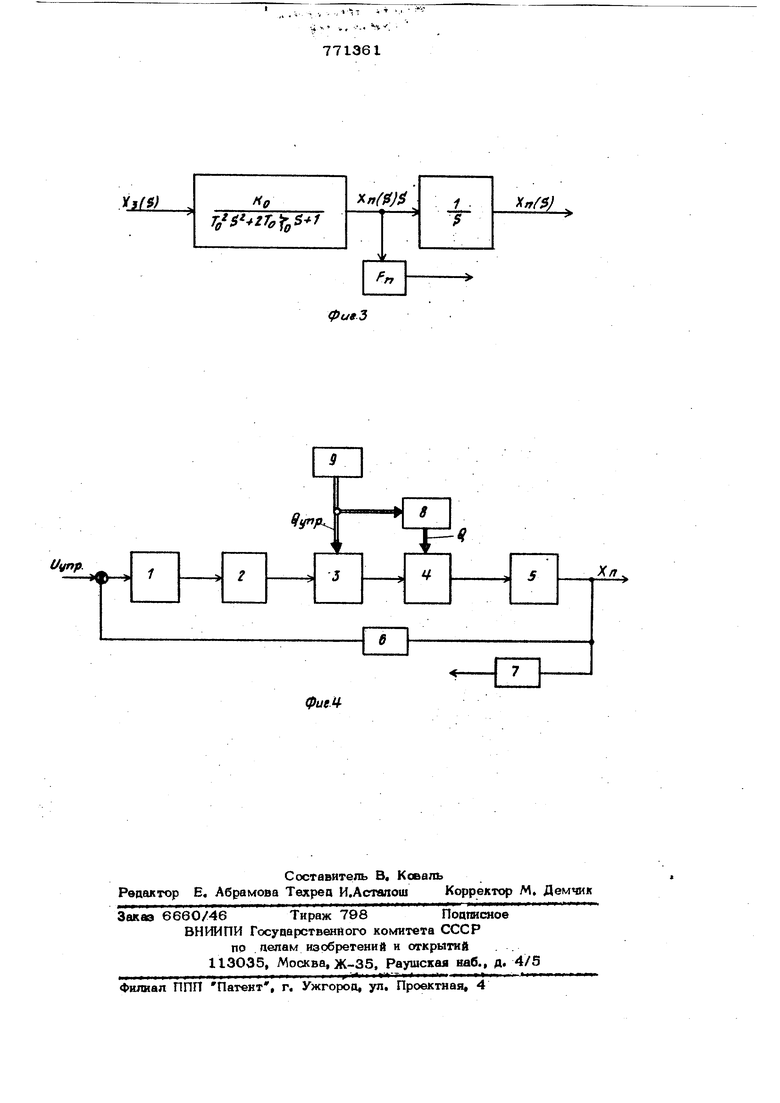
Изобретение относится к системам автоматического регулирования, в частности к эпектрогицравлическим следящим системам. Известен электрогицравпический привоц ороссельного управления, содержащий последовательно уст.ановленные операционный усилитель, электромеханический преобразователь, овухкаскапный гицроусилитель и исполнительный механизм и датчик расхода рабочей жидкости , Недостатком известного привода явпяет сй то, что скоростная характеристика привода зависит от электрической помехи, что требует увеличения мощности привода и, как следствие,уввличения веса игабаритов как самого привода, так источника гидравлического питания. Целью изобретения является обеспечени независимости скоростной характеристики привода от электрической помехи. Поставленная цель достигается тем, что привод дополнительно соде{:житограничи(гель расхода с заданной характеристикой, который установлен на входе второго каскада гицроусилителя. На фиг. I представлена блок-схема электрогидравлического привода дроссельного управления с механической обратной связью по pacxocQT рабочей жидкости;на фиг. 2 - мощностная характеристика ограничителя расхода; на фиг. 3 - структурная схема исполнительной части электрогидравоического привода дроссельного уп- оавления4 на. г. 4- блок-схема элeктpo гидравлического привода дроссельного управления с электрической обратной cBsBbip по расходу рабочей жидкости. Электрогисфавлический привод хроссельного управления содержит последовательно установленные операционный усилитель I (фиг. I и 4), аяектромеханический преобразователь 2, двухкаскадный гидроусилитель, включающий первый каскад усиления 3 и второй каскад усиления 4, исполнительный механизм 5. Привод также включает датчик расхода рабочей жид-кости 6, датчик 7 обратной связи пЪ положенто :7, ограничитель расхода 8 с з данной характеристикой (фиг. 2), которы установлен на входе второго каскада усиления 4. Питание привода осуществляется от источника гидравлической энер гии 9. Электрогидравлический привод дроссельного управления работает следующим образом. Расход рабочей жидкости подается от источника гидравлической энер гии 9 на вход первого каскада усиления 3 и на вход ограничителя расхода 8. Работа ограничителя расхода 8, как следует,из мощностной характеристики (фиг. 2),. сводится к тому, что с ростом расхода рабочей жидкости увеличивается перепад давления на ограничителе расхода 8, а, начиная с некоторого значения перепада дав лени и , величина протекающего через ограничитель расхода 8 рабочей жидкости остается постоянной . Если электрическая помеха имеет такую частоту, что исполнительный .механизм 5 является фильтром для сигнала помехи, то ограничитель расхода 8 не будет реагаровать на эти частоты. Например, пусть передаточная функция исполнительного механизма (ИМ) 5 имеет вид: v.(S). Ы)(,.1) где Х(,) -координата, характеризующая движение выходного звена исполнительного механизма; Xjj(S)-«оордината, характеризующая движение второго каскада усиления гидроусилителя; о постоянная времени ИМ; Х.О коэффициент усиленияИМ; J - относительный коэффициент затухания ИМ, Эта передаточная функция может быт Представлена в виде структурной схемы (фиг. 3). Если частота электрической помехи т скорость исполнительного механизма 5 равна SXf,CS) « сл:едовательно, ограничитель расхода 8 не будет реагировать на помеху. В случае, если частота электрической помехи ,4 , то ограничитель расхода 8 будет реагировать на изменение расхода в соответствии с частотой и ампл тудой помехи. В этом случае ограничите расхода 8, как звено с насыщением, буд уменьшать интегральное значение расход рабочей жидкости, что вызовет увеличени рассогласования и соответствующее увели чение координаты второго каскада усилени идроусилителя л-v до величины, коменсирующей отклонение расхода рабочей идкости от величины, соответствующей игналу управления. Аналогично такая хема компенсирует влияние на скоростую характеристику перепада давлений на ограничителе расхода 8. Отличие работы электрогидравлического привода дроссельного управления с электрической обратной связью по расходу рабочей жидкости (фиг, 4) от-электрогидравлИческого привода дроссельного упрявле11ия с механической обратной связью по расходу рабочей жидкости (фиг. 1) заключается в том, что такая схема может и не иметь запас, по линейным зонам сиг нала управления и моментам управления, так как любое уменьшение этих сигналов вследствие действия электрической помехи. уменьшает коэффициент усиления внутреннего контура, но практичеки не уменьшает коэффициент передачи от сигнала управления на входе U упр. скорости движения выходного звена исполнительного механизма. Положительным эффектом выше описанного электрсяидравлического привода является то, что без ущерба для динамических характеристик привода снижается требуемая мощность источника питания на 50-80%, так как в сущест15ующих системах приводов расчет необходимой производительности источника питания ведется по скорости исполнительного механизма, определенной с учетом ее уменьшения при действии электрической помехи. Снижение мощности источника питания позволяет снизить вес игабариты привода. Формула изобретения Электрогидравлический привод дроссельного управления, содержаший последовательно установленные операционньй усилитель, электромеханический преобразователь, двухкаскадный гидроусилитель и исполнительный механизм и датчик расхода рабочей жидкости, или датчик скорости исполнительного механизма, отличающийся тем, что, с целью обеспечения независимости скоростной характеристики привода от электрической помехи, привод дополнительно содержит ограничитель расхода с заданной характеристикой, который установлен на входе второго каскада гидроусилителя; Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР N9 377729, кл, Р 15 В 9/03, 1970,,
.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО РАСХОДУ | 2011 |
|
RU2467215C1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО РАСХОДУ | 2011 |
|
RU2489607C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
.
- ЛР
4Л
(fJue.Z
