(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2007 |
|
RU2361119C2 |
| Электрогидравлическая следящая система | 1989 |
|
SU1679075A1 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО РАСХОДУ | 2011 |
|
RU2467215C1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО РАСХОДУ | 2011 |
|
RU2489607C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
1
Изобретение относится к гидроавтоматике и может быть использовано, например, в гидросистемах манипуляторов и промышленных роботов.
Известен электрогидравлический следящий привод, содержащий источник питания, исполнительный гидродвигатель с датчиком положения, электрогидравлический усилитель с двухкаскадным гидроусилителем, связачным с полостями гидродвигателя, дроссе1 Г1ирующий элемент, имеющий регулирующий и гидравлические входы, при этом последний связан с источником питания, и выход, датчик давления на гидролинии нагнетания второго каскада гидроусилителя, измеритель ошибки, связанный входами с задающим устройством и с датчиком положения, а выходом - с электрогидравлическим усилителем и, через последовательно установленные блок модуля ощибки и сравнивающее устройство, соединенное с датчиком давления, - с регулирующим входом дросселирующего элемента 1.
Недостатком известного привода является низкий КПД, так как отсутствует разгрузка источника питания при понижении давления в гидролинии нагнетания второго
каскада гидроусилителя, а также малый диапазон регулирования, поскольку величина регулируемого давления существенно зависит от величины расхода через дросселирующий элемент.
5 Цель изобретения - повышение КПД и расширение диапазона регулирования.
Указанная цель достигается тем, что дросселирующий элемент гидравлическим входом соединен с гидролинией нагнетания
10 второго каскада гидроусилителя, а выходомсо сливом.
При этом дросселирующий элемент выполнен двухкаскадным с первым каскадом в виде элемента сопло-заслонка и вторым каскадом - в виде дросселирующего двух15 линейного золотника.
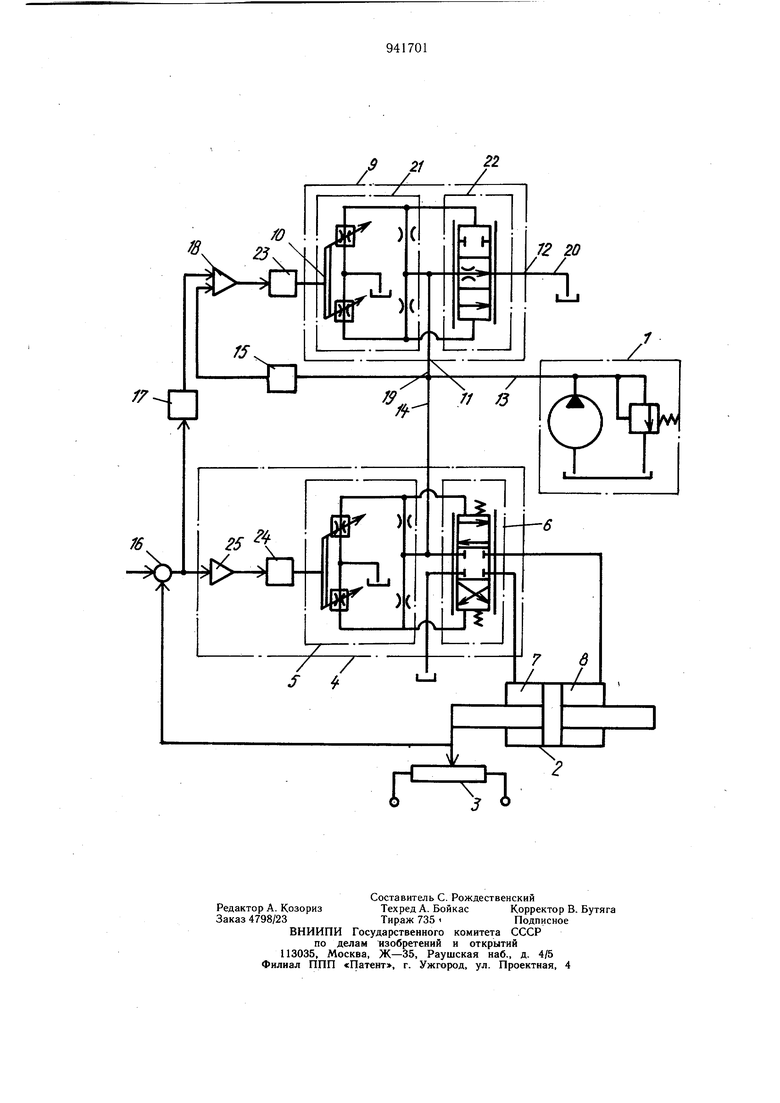
На чертеже изображена схема электрогидравлического следящего привода.
Привод содержит источник питания 1, исполнительный гидродвигатель (цилиндр)
20 2 с датчиком 3 положения, электрогидравлический усилитель 4 с двухкаскадным гидроусилителем, включающим первый каскад 5 и второй каскад в виде четырехлинейного золотника 6, связанного с полостями 7 и 8 гидродвигателя 2, дросселирующий элемент
9, имеющий регулирующий вход 10, гидравлический вход 11 и выход 12. Гидравлический вход 11 гидролинией 13 связан с источником питания 1. На гидролинии 14 нагнетания второго каскада 6 гидроусилителя установлен датчик 15 давления. Датчик 3 положения связан с входом измерителя 16 ошибки, один из входов которого связан с задающим устройством (на чертеже не изображено). Выход измерителя 16 ощибки связан с электрогидравлическим усилителем 4 и через последовательно установленные блок 17 модуля ощибки и сравнивающее устройство 18, соединенное с датчиком 15 давления, - с регулирующим входом 10 дросселирующего элемента 9. Гидравлический вход 11 гидролинией 19 соединен с гидролинией 14 нагнетания второго каскада 6. Выход 12 дросселирующего элемента 9 соединен гидролинией 20 со сливом. Дросселирующий элемент 9 выполнен двухкаскадным с первым каскадом в виде элемента 21 сопло-заслонка и вторым каскадом в виде дросселирующего двухлинейного золотника 22.
Для управления дросселирующим элементом 9 служит электромеханический преобразователь 23, для управления двухкаскадным гидроусилителем - электромеханический преобразователь 24. На входе преобразователя 24 установлен электронный усилитель 25.
Электрогидравлический следящий привод работает следующим образом.
При наличии сигнала на выходе измерителя 16 ощибки, золотник 6 смещается из среднего положения, гидродвигатель 2 перемещается, при этом сигнал датчика 3 направлен на уменьщение сигнала на выходе измерителя 16 ошибки. Одновременно на выходе блока 17 модуля ошибки формируется сигнал, пропорциональный модулю ошибки привода U Uoi+K/6/, где UQ - постоянная составляющая сигнала блока модуля ошибки 17, определяющая минимальное давление в гидролиниях 13, 14 и 19, 6 - сигнал ощибки привода на выходе
измерителя 16 ошибки, К - постоянный коэффициент. Устройством 18 сигнал блока 17 модуля ощибки сравнивается с сигналом датчика 15 давления, усиливается и подается на вход электромеханического преобразователя 23, а элементом 21 сопло-заслонка формируется перепад давлений, управляющий положением дросселирующего двухлинейного золотника 22. Последний перемещается до тех пор, пока сигнал датчика 15 давления не компенсирует сигнал с выхода блока 17 модуля ощибки. Таким образом, с изменением ошибки привода изменяется давление в гидролинии 14 нагнетания второго каскада 6
гидроусилителя и. одновременно - на выходе источника питания.
Этим обеспечивается разгрузка источника питания при работе привода в режимах малых рассогласований, связанный с небольшими затратами энергии и, кроме того, улучшает динамические характеристики привода при отработке больших рассогласований.
Выполнением дросселирующего элемента 9 двухкаскадным с первым каскадом в виде элемента 21 сопло-заслонка и вторым каскадом в виде дросселирующего двухлинейного золотника 22 обеспечивается независимость регулируемого давления от расхода через дросселирующий элемент 9 и тем самым расщирение диапазона регулирования.
Применение предлагаемого устройства в гидросистемах промышленных роботов и манипуляторов позволит повысить их КПД и расширить диапазон регулирования, что повысит эффективность их использования.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Прокофьев В. Н. и др. Проектирование и. расчет автономных приводов. М., «Машиностроение, 1978, с. 204, рис. 6.5.
rs
tt
v
/
/
y/ 9
)(
(
ALT
/
7 d //
r
/
г
f
