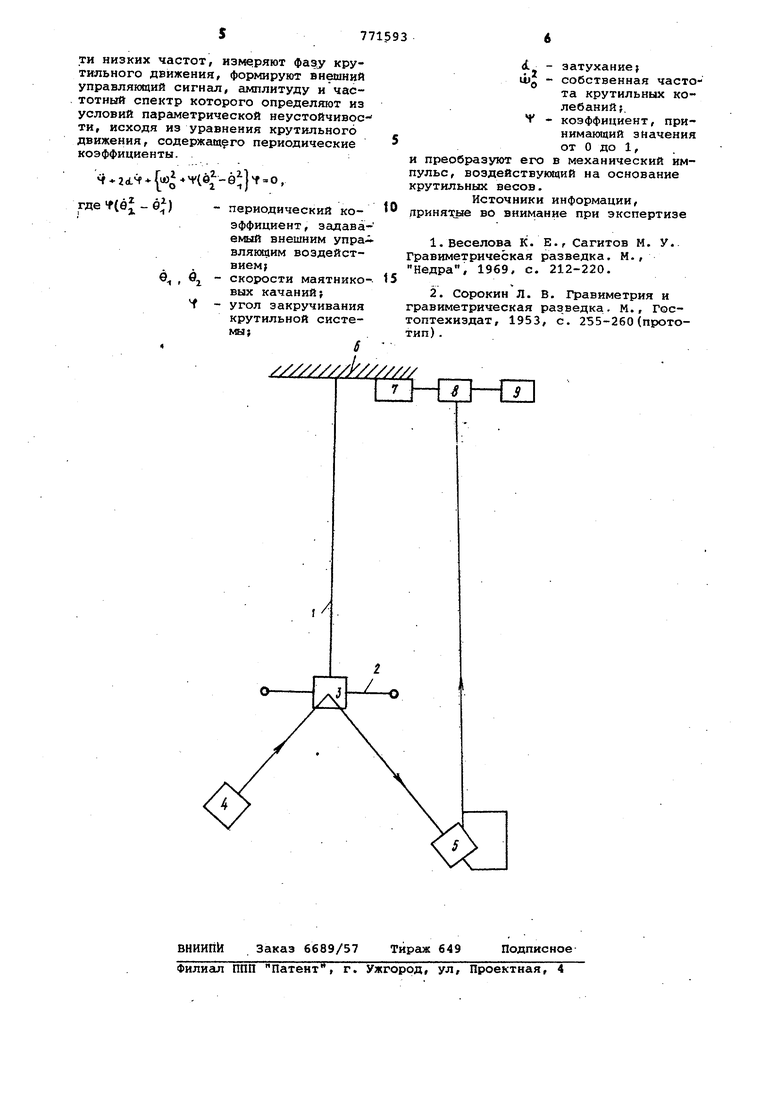
Изобретение относится к области точного -приборостроения и предназначается для прецизионных измерений, например, в гравиметрии, для измерения вторых производных гравитационного потенциала. Известен способ измерения низкочастотных гравитационных сигналов с помощью горизонтальных крутильных весов, при котором регистрируется период собственных крутильных колебаний , несущий информацию о переменном гравитационном сигнале 1. Недостатком этого способа является необходимсЛть удлинения нити подвеса для увеличения чувствительности, что увеличивает габариты прибора. Известен также способ измерения низкочастотных гравитационных сигналов с помощью крутильных весов, заключающийся в измерении амплитуды вынужденного движенияС2. Недостатком данного способа является невозможность значительного уве личения чувствительности крутильной системы без увеличения длины нити подвеса, a следовательно, и габаритов прибора; увеличение чувствитель .ности за счет уменьшения диаметра нити подвеса ограничивается опасностью обрыва нити под действием вибраций и ударов. К недостаткам способа относится также сравнительно низкая чувствительность к воздействиям, частоты которых близки к частоте собственных колебаний, однако выходят за пределы полосы пропускания. . Цель изобретения - расширение полосы пропускания измеряемого сигнала в области низких частот без изменения габаритов крутильной системы. Указанная цель достигается тем, что измеряют фазу крутильного движения, формируют внешний управляющий сигнал, амплитуду и частотный спектр которого определяют исходя из условий параметрической неустойчивости, по уравнению крутильного движения, содержащему периодические коэффициенты:4+2(if о ° где 4(ej;- в) периодический коэффициент, задаваемый внешним управляющим воздействием;9 , 6, - скорости маятниковых качаний} f - угол закручивания крутильной системы i - затухание; - собственная частот та крутильных колебаний;Ч - коэффициент, принимающий значения от 6 до 1,;и преобразуют его в механический импульс, воздействующий на осно анне крутильных весов. Известно, что в уравнении горивок тальных крутильных весов, на основанио которых действуют инерционные ускорения, появляется динамическая составляющая крутильной жесткости Кд. Эта составляквдая является функцией скорости и маятниковых качаний Кд Ч -Т е - Q ) , где f - момент инерции коромысла, и в зависимости от закона изменения, инерционных ускорений может меняться во времени. Так как крутильная жесткость является энергоемким параметром, то при ее изменениях может происходить как накачка энергии в крутильную степень свободы, так и ее от качка. Относительная величина перека чиваемой энергии будет определяться следующим образом: где ш - энергия осциллятора(крутильной системы); m - константа, определяется зако ном измерения энергоемкого параметра во времени Т/- период крутильных колебаний. Маятниковые колебания крутильной системы со скоростями 9,и 0 , которые можно вызвать внешними воздействиями, будут состоять из вынучкденных и свободных движений, затухание которых, определяемое добротностью по этим степеням свободы, будет довольно быстрым по сравнению с Затуханием крутильных движений.Следовательно, длительность маятниковых качаний будет ограничиваться временем действия вынуждающего воздействия и временем затухания свободных движений. ВыЬирая параметры крутильной системы и вынуждающего воздействия определенным образом, можно осуществит накачку энергии в крутильную степень свободы с определенной частотой и амплитудой,исходя из диаграммы Айнса Стретта, определяющей области параме рической устойчивости и неустойчивос нестационарной системы. Таким образом, крутильные весы по лучают возможность работать в режиме параметрического усиления с коэффициентом усиления К : .I - -ma/jT где а - добротность системы. При этом увеличение чувствительности происходит не только в области резонанса, когдаиО равна собственной частоте осциллятора (tig, но в общем случае, при N/2 (,2,3...), хотя при порог параметрического усиления повышается. Одновременно расширяется полоса пропускания системы в окрестности каждой из выбранной частот в соответствии с диаграммой Айнса-Стретта. На чертеже представлена схема для осуществления предложенного способа. На упругой нити 1 подвешено коромысло 2 с зеркалом 3, образующим вместе с осветителем 4 и приемно-регистрирующим блоком 5 систему индикации крутильных движений маятника. На корпусе 6 закреплен вибродвигатель 7, логическое устройство 8 и генератор накачки 9. Предлагаемый способ заключается в следующем.Крутильная система, состоящая из коромысла с грузами и ни.ти, под действием внешнего низкочастотного сигнала поворачивается на . угол 0 , измеряемый системой индикации, генератор накачки 9 выдает сигнал определенной формы(импульс, постоянное смещение, гармоническое воздействие).который, поступая в логическое устройство 8, проходнт вйбродвигатель 7 только в определенной фазе крутильных колебаний, сигнал о достижении которой выбирается в приемно-регистрирующем блоке 5 и , .подается в логическое устройство 8. Предложенный способ позволит изменить при проводимых на крутильных весах измерениях принцип параметрического усиления. В частности, расширяется, полоса пропускания системы как за счет увеличения чувствительности на собственной частоте, так и за счет появления новых частот пропускания, соответствующих частотам па раметрической неустойчивости.Увеличение чувствительности обратно пропорционально разности накачиваемой энергии и потерь, увеличиваясь при их сближении. Так, при кац )СС.ИП 0,9 .lO. Формула изобретения Способ измерения низкочастотных гравитационных сигналов с помощью крутильных весов, заключаюшийся в измерении амплитуды вынужденного движейия, отличающийся тем, что, с целью pacmHpeHviH полосы пропускания измеряемого в области низких частот, измеряют фазу крутильного движения, формируют внешний управляющий сигнал, амплитуду и частотный спектр которого определяют из условий параметрической неустойчивости, исходя из уравнения крутильного движения, содержащего периодические коэффициенты. (eJ-9)f 0, гдеf(e,j - 0) - периодический коэффициент, задаваемый внешним упра влякицим воздействием;скорости маятнико вых качаний; угол закручивания крутильной системы;
////////)
///Л
//
dL. - затухание; liig - собственная частота крутильных ко лебаний;. - коэффициент, принимающий значения от О до 1, и преобразуют его в механический импульс, воздействующий на основание крутильных весов. Источники информации, дpинятjJe во внимание при экспертизе 1.Веселова К. Е., Сагитов М. У. Гравиметрическая разведка. М., недра, 1969, с. 212-220. 2. Сорокин Л. В. Гравиметрия и гравиметрическая разведка. М., Гостоптехиздат, 1953, с. 255-260(прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Горизонтальный крутильный маятник | 1979 |
|
SU789965A1 |
| Горизонтальный крутильный маятник | 1978 |
|
SU697946A1 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| Способ управления технологией самоизмельчения руд в промышленных барабанных мельницах | 1986 |
|
SU1447405A1 |
| Гравитационный вариометр | 1977 |
|
SU693325A1 |
| Способ определения гистерезисных потерь крутильной системой | 2015 |
|
RU2614647C1 |
| Способ исключения резонансных режимов в фрикционных дисках гидромеханической трансмиссии транспортной машины | 2019 |
|
RU2728584C1 |
| Способ управления процессом измельчения в промышленных барабанных мельницах | 1984 |
|
SU1238793A1 |
| Способ определения гистерезисных потерь крутильной системой при повышенных температурах | 2018 |
|
RU2680976C2 |
| Способ управления загрузкой барабанных мельниц при измельчении минерального сырья | 1987 |
|
SU1502103A1 |
