1
Изобретение относится к области измельчитель ной техники и предназна-ч чено для автоматического изменения подачи продукта в дробилку, ее защиты от завалов перерабатываемым продуктом 5 Б случае перегрузки электройривода дробилки или отключения подачи электроэнергии, а также облегчения запуска дробилки.
Известны устройства для регулироваЮ ния загрузки сыпучего материала в дробилку, содержащие бункер, секторную заслонку, установленную под выходным патрубком бункера и повора.чиваемую. вокруг оси исполнительньом механизме, 5 подключенным к автоматическому регулятору загрузки дробилки I.
Недостатком этого устройства является отсутствие зёициты дробилки от завалов в случае ее перегрузки или 20 отключения подачи электроэнергии и усложненная схема управления запуском дробилки.
Наиболее близким по технической сущности к изобретению является уст- 25 ройство для регулирования загрузки сыпучего материала в дробилку, содержащее заслонку, исполнительный электродвигатель, связанный с винтом, на котором установлены гайки с дат- 30
чиками уровня, выходы которых подключены к первому и второму входам блока регулирования, первый выход и третий вход которого-подключены соответственно к исполнительному электродвигателю и электродвигателю дробилки 2.
Однако такое устройство также ненадежно в работе, не обеспечивается автоматизация всего процесса.
Целью изобретения является повышение надежности устройства.
Поставленная цель достигается тем, что в устройство введены кинематически связанный с гайками электромагнит и датчик положения заслонки, подключенные соответственно ко второму выходу и четвертому входу блока регулирования, причем якорь электромагнита кинематически связан с заслонкой.
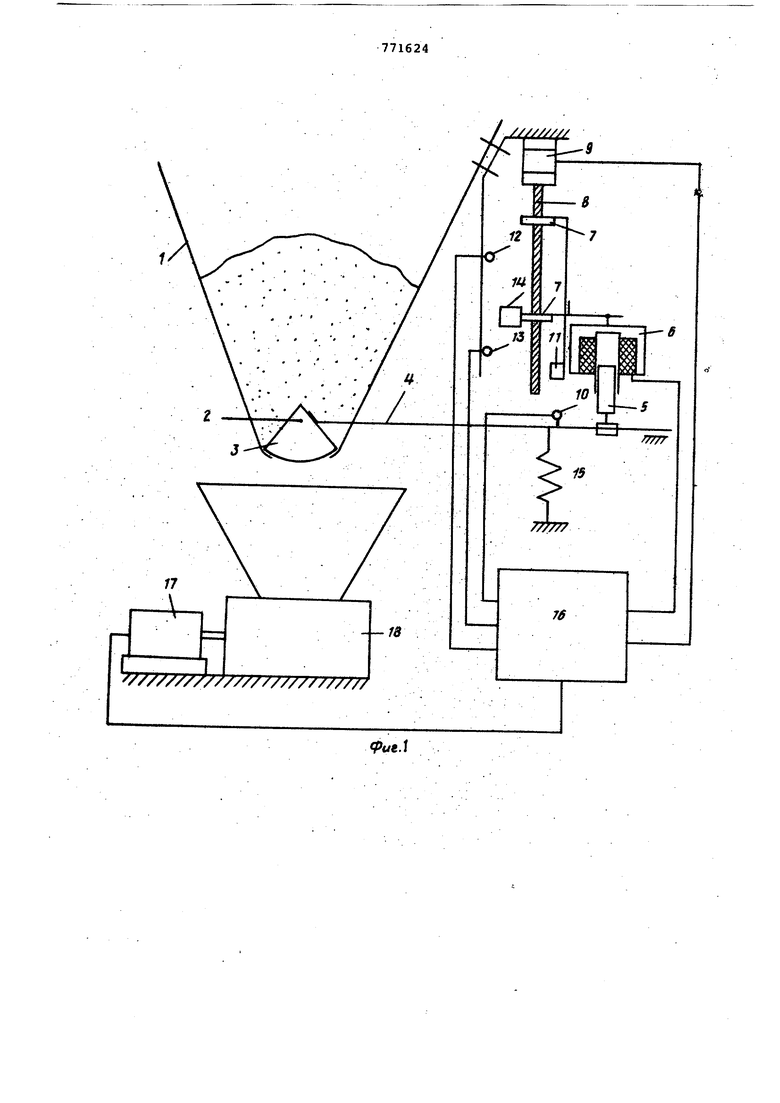
На фиг. 1 изображена схема устройства для регулирования загрузки сыпучего материала в дробилку; на фиг. 2 электрическая схема управления.
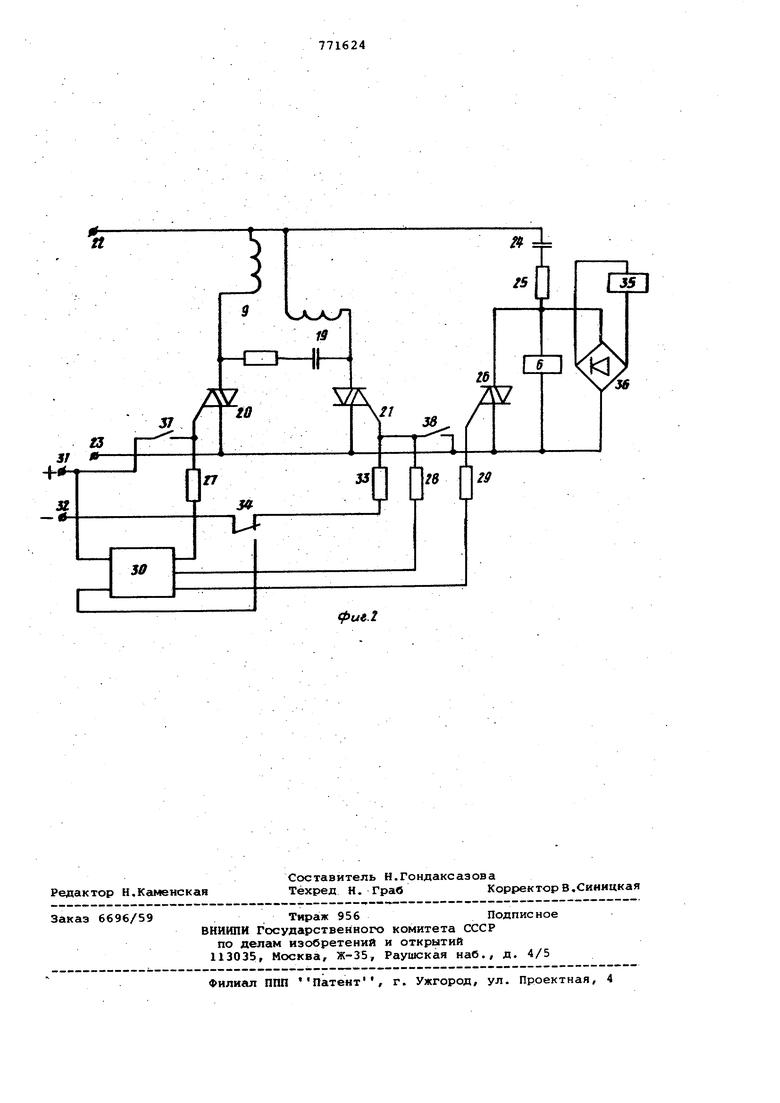
Устройство содержит бункер 1, в выпускной горловине которой расположена поворачиваемая вокруг оси 2 заслонка 3. К заслонке прикреплен рычаг 4, связанный с якорем 5 электромагнита 6. Электромагнит 6 шарнирно связан с гайками 1, перемещающимися вдоль винта 8 вращение которого осуществляется исполнительным электродвигателем 9. На рычаге 4 или на заслонке установлен геркон 10, образующий с воздействующим на него постоянным магнитом 11, расположенным на гайках 7, датчик положения заслонки относительно электро магнита. Для ограничения перемещения винтовой передачи служат датчики уров ня образованные, например, герконами 12, 13 и постоянным магнитом 14. С ры чагом заслонки соединена пружина 15, возвращающая заслонку в исходное, зак рывающее бункер1, положение. Исполни тельный электродвигатель 9, электромагнит 6 и контакты датчиков положени и уровня 10, 12, 13 подсоединены к бл ку регулирования 16, на вход которого подается сигнал, пропорциональный или потребляемой мощности приводно го электродвигателя 17 дробилки 18. Электрическая схема управления (фиг. 2) содержит исполнительный электродвигатель 9 с фазовращательным конденсатором 19, Статорные обмотки электродвигателя 9 подключены к выход ным тиристорам (симисторам) 20, 21, которые содержатся в блоке регулирования 16. Обмотка электромагнита 6 подсоединена к блоку регулирования (клеммы 22, 23) через балластное сопротивление (конденсатор 24 и резистор 25). Параллельно обмотке подключен си мистор 26. Управляющие электроды симисторов подсоединены через резисторы 12 - 29 к электронному блоку 30 блока регулирования. Источник питания (клеммы 31, 32) блока регулирования подключается к управляющему электроду симистора 21 через резистор 33 ил к электронному блоку 30 через переключающие контакты 34 датчика 10 пол жения заслонки относительно электромагнита. Датчик положения заслонки может быть выполнен и в виде электромагнит ного реле 35 с контактами 34, подсоединяемого через выпрямительный мост 36 параллельно обмотке электромагнита 6. Работает устройство cлeдJюraим образом, До включения устройства в работу заслонка 3 перекрывает выпускную гор ловину бункера 1, и перерабатываемый продукт в дробилку не поступает. Есл якорь 5 отдален от электромагнита 6 и не замыкает магнитопровод электром кита, то и постоянный магнит 11 отдален от переключающего геркона 10 датчика положения заслонки. Через замкнутые контакты 34 геркона 10 и р зистор 33 под действием напряжения И точника питания через промежуток катод-управляющий электрод оимистора 2 протекает ток, вызьшающий отпирание симистора 21 и включение исполнитель ного электродвигателя 9 в сторону опускания электромагнита 7. Когда магнитопровод электромагнита .приблизится к якор:о 5, его индуктивное сопротивление резко возрастает, возрастает и напряжение на его обмотке до номинальной величины за перераспределения напряжения ме)вду обмоткой и балластным сопротивлением 24 - 25. Электромагнит с определенной силой удер живает якорь и за счет этого осуществляется передача момента от исполнительного электродвигателя 9 к заслонке 3. Одновременно постоянный магнит 11 приближается к геркону 10, nepeKjnoчая его контакты 34. При этом источник напряжения откпючается от симистора 21 и подключается к электронному блоку 30. Когда после пуска приводного электродвигателя 17 дробилки 18 его ток умень иается, электронный блок 30 вырабатывает команды, вызывающие отпирание симистора 20, и исполнител ный электродвигатель 9 начинает вращаться в сторону подъема заслонки. Поскольку симистор 26 заперт, напряжение на обмотке электромагнита 6 номинальное, и через винтовую пару и электромагнит исполнительный электродвигатель 9 поднимает рычаг 4. Заслонка поворачивается, увеличивая загрузку сыпучего материала в дробилку. При увеличении нагрузки эле тродвигателя 17 дробилки до нормы все три симмстора заперты и исполнительный электродвигатель 9 останавливается, а заслонка 3 находится в неподвижном положении. При увеличении нагрузки электродвигателя дробилки 17 выше нормы под действием электронного блока 30 регулятора отпирается симистор 21 и исполнительный электродвигатель 9 поворачивает заслонку в сторону уменьшения щели. В случае выключения электропривода дробилки или аварийного исчезновения напряжения питания электромагнит 6 обеспечивается, соединение винтовой пары с рычагом заслонки прекращается, и под действием пружины 15 заслонка мгновенно поворачивается, закрывая горловину. Подача сыпучего материала в дробилку прекращается. Аналогично при значительной перегрузке электропривода дробилки срабатывает узел перегрузки, содержащий в электронном блоке 30 автоматический регулятор, вызывающий отпирание симистора 26. Последний шунтирует обмотку электромагнита 6, вызывая его v отключение, и заслонка при этом мгновенно закрывается. Введение электромагнита и возвратной пружины позволяет исключить завал дробил1{и продуктом и исключить перегрузку его электропривода. Вместо пружины 15 для закрывания секторной заслонки может быть применен груз. Поскольку электромагнит имеет перемещение в ограниченном диапазоне.
токоподврд к нему осуществляется гибким проводом. Ограничение диапазона хода гайки винтовой пары осуществляется при помощи постоянного магнита 14 и герконов 12, 13, контакты 37 и 38 которых при замыкании шунтируют цепи управления симистров 20 и 21, останавливая исполнительный электродвигатель 9.
Датчик положения заслонки относительно электромагнита может быть выполней в виде реле 35, подключаемого параллельно обмотке электромагнита 6 переменного тока, В этом случае геркон 10 и магнит 11 из конструкции питателя исключгиотся.
Работает датчик положения следующим образом.
Когда магнитопровод электромагнита разомкнут основная ча.сть напряже-т ния питания источника 22 - 23 падает на балластном сопротивлении 24, 25, так Как индуктивное его сопротивление мало.Следовательно реле 35 будет выключено и через его контакты 34 будет подано напряжение, отпирающее симистор 21, обеспечивающий вращение электродвигателя 9 в сторону сближения электромагнита- с якорем. Когда магнитопровод электромагнита замвлкается, индуктивное сопротивление элект ромагнита резко возрастает, возрастает падение напряжения на нем за счет резонанса напряжений с конденсатором 24 до номинальной величины, исрабатывает под его действием реле 35, пер ключая контакты 34. При предложенном подключении электромагнита он сочета.ет.в себе роль удерживающего электромагнита и датчика положения заслонки относительно электромагнита.
Таким образом, введение новых элементов и связей обеспечивает автоматизацию технологического процесса, исключает аварийные режимы и тем самым повышает надежность работы устройства.
Формула изобретения
Устройство для регулирования загрузки сыпучего материала в дробилку содержащее заслонку, исполнительный электродвигатель, связанный с винтом, на котором установлены гайки с датчикамн уровня, выходы которых подключены к первому и второму входам блока регулирования, первый выход и третий вход которого подключены соответственно к исполнительному электродвигателю и электродвигателю.дробилки, отличающееся тем, что, с целью повышения надежности устройства в него введены кинематически связанный с гайками электромагнит и датчик положения заслонки, подключенные со ответственно ко второму выходу и четвертому входу блока регулирования, причем якорь электромагнита кинематически с&язан с заслонкой.
Источники информации, принятые So внимание при экспертизе
1.Попков С.Л. Автоматическое регулирование и управление процессами переработки зерна. М., Колос, 1972, с. 209 - 210.
2.Патент Великобритании 1042568 кл. G 3 R, опублик. 1964 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпозиционный регулятор | 1981 |
|
SU1004996A1 |
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| Импульсный регулятор | 1983 |
|
SU1120281A2 |
| Регулятор | 1980 |
|
SU881703A1 |
| Сигнализатор уровня сыпучих материалов | 1987 |
|
SU1597581A1 |
| Электромеханический регулятор уровня жидких и сыпучих сред | 1977 |
|
SU708316A1 |
| Регулятор (его варианты) | 1981 |
|
SU985769A1 |
| Импульсный регулятор | 1976 |
|
SU640251A1 |
| Двухпозиционный регулятор | 1979 |
|
SU853618A2 |
| Устройство дистанционного управления исполнительным механизмом | 1981 |
|
SU1040465A1 |