I
Изобретение относится к области автоматики и предназначено для регулирования и непрерывного контроля уровня различных сыпучих и жидких сред в емкостях.
Известен электромеханический регулятор жидких и сыпучих сред, содержащий реверсивный электродвигатель, связанный через гибкую механическую связь с барабаном, к которому подвешен трос с поплавком и который расположен на подвижной планке, и электронное реле времени периодических включений 1.
Однако известный регулятор имеет сложную кинематическую и принципиальную электрическую схемы, большое количество пружин, контактов реле и путевых выключателей и т. п.
Наиболее близким по технической сущности к предложенному изобретению является электромеханический регулятор уровня жидких и сыпучих сред, содержащий зонд на тросе, закрепленном на барабане, соединенном через механическую передачу с индикатором уровня, а через редуктор - с реверсивным электродвигателем, и блок управления выполненный в виде последовательно соединенных реле времени и снмисторного коммутатора, подключенных к источнику постоян Сго напряжения, индуктивно связанному с источником переменного напряжения, к одному из выводов которого лодключены аервые выводы двух оомоток реверсивного электродвигателя, а второй вывод nepsoH обмотки реверсивного электродвигател;.-: через конденсатор связан с вторым выводом источника переменного напряженин 2.
Данный электромеханический регулятор уровня жидких и сыпучих сред включает в себя муфту довольно сложной конструкции, что снижает надежность его работы.
Цель изобретения - повышение надежности регулятора.
Для достижения указанной цели регулятор содержит дополнительный конденсатор, одна обкладка которого подключена
к второму выводу первой обмотки реверсивного электродвигателя, а вторая обкладка - к выходу симисторного коммутатора и второму выводу второй обмотки реверсивного электродвигателя.
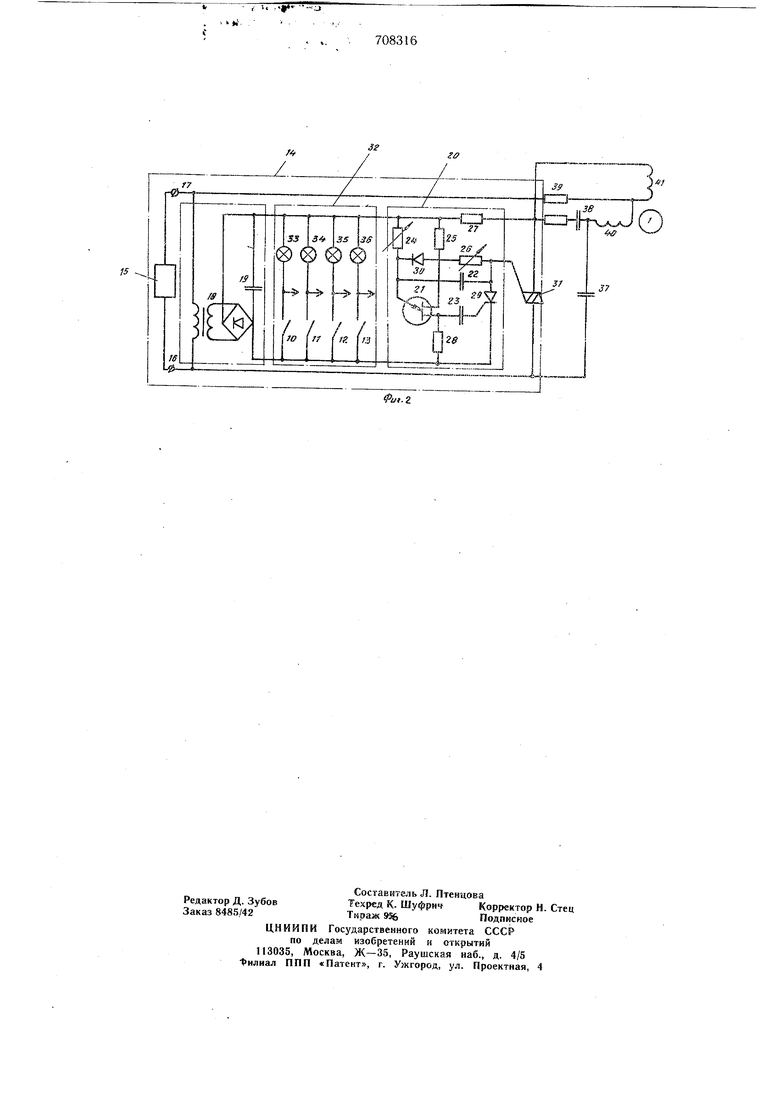
Кинематическая схема электромеханического регулятора уровня жидких и сыпучих сред приведена на фиг. 1, а его принципиальная электрическая схема - на фиг. 2 Регулятор содержит реверсивный электродвигатель I, передающий вращение через редуктор 2 барабану 3 с тросом 4, на конце которого находится груз (зонд) 5. Через механическую передачу 6, составленную винтом 7 и гайкой 8, перемешаемой вдоль винта при его вращении, барабан связан с постоянным магнитом 9, взаимодействующим с путевыми переключателями (герконами) 10-13.
Принципиальная электрическая схема электромеханического регулятора уровня жидких и сыпучих сред (фиг. 2) содержит блок управления 14, включающий в себя источник переменного тока 15 с выводами 16 и 17, источник постоянного тока 18 с конденсатором фильтра 19, реле времени 20, содержащее однопереходный.транзистор 21, конденсаторы 22 и 23, резисторы 24-28, тринистор 29, диод 30, и симисторный коммутатор 31. Кроме того, электромеханический регулятор уровня жидких и сыпучих сред содержит индикатор 32 уровня, содержащий сигнальные лампы 33-36, а также конденсатор 37, дополнительный конденсатор 38, резистор 39.
Кроме того, на фиг. 2 показаны первая и вторая обмотки 40 и 41 реверсивного электродвигателя 1.
Электромеханический регулятор уровня жидких и сыпучих сред работает следующим образом.
При подаче .напряжения питания реле времени 20 начинает периодически включать реверсивный электрсдвигатель 1 в сторону подъема груза, а зате.м в сторону его опускания. Вре.адя подъема груза устанавливается меньщим времени его опускания. Опускание груза осуществляется в основном под действием его веса, поскольку момент, развиваемый реверсивным электродвигателем 1, устанавливается меньщим тормозного момента, создаваемого при вращении барабаном 3 и редуктором 2. Поэтому, когда груз опустится на поверхность материала, трос 4 не размагничивается, хотя реверсивный электродвигатель i находится под напряжением. Когда реверсивный электродвигатель 1 вращается, то вращается винт 7, пере.мещаюашй поступательно гайку 8 с постоянным магнитом 9. Чтобы гайка 8 не вращалась вместе с винтом 6, она укреплена в горизонтальных направляющих. Постоянный магнит 9, перемещаясь над неподвижно установленными герконами 10-13, вызывает переключение их контактов, которые включены в цепи индикатора 32 уровня, как показано на фиг. 2. При загрузке емкости материало.м зонд будет периодически подниматься и находиться на месте, а при разгрузке емкости или прекращении забора материала из нее зонд периодически поднимается и опускается. Причем, скорость подъема и опускания зонда должна превышать скорость изменения уровня материала в емкости.
Реле времени 20 работает следующим образом.
При подаче напряжения питания по цепи, образованной резистором 27, переходом катод-управляющий электрод симистора 31, конденсатором 22, эмиттер-базой транзистора 21 и резистором 28, протекает импульс
5 тока, заряжающий конденсатор 22 до напряжения источника питания постоянного тока 19. Под действием падения напряжения на резисторе 28 через конденсатор 23 отпирается тринистор 29, и через резистор
2Ф 27, переход катод-управляющий электрод симистора 31 и анод-катод тринистора 29 протекает постоянный ток. Симистор 31 отпирается по анодной цепи, и реверсивный электродвигатель 1 начинает вращать барабан 3 в сторону опускания зонда. При этом
момент, развиваемый реверсивным электродвигателем 1, устанавливается меньщим тормозного момента барабана 3 и редуктора 2, что позволяет зонду под действием силы собственной тяжести опускаться до поJQ верхности среды. Когда зонд достигнет уровня среды, трос 4 перестает разматываться, а груз находится на поверхности среды в течение времени, определяемого временем открытого состояния тринистора 29. При открытом симисторе 31 емкость фазосдвк3 гающего конденсатора, через которую оказывается подключенной первая обмотка 25 реверсивного электродвигателя 1, равна су.мме емкостей конденсаторов 37 и 38 и превышает йоминальное значение. Следовательно,
j и момент, развиваемый реверсивным электродвигателем 1, может быть установлен в любых пределах меньще его номинального момента, в зависимости от величины емкости 37.
Когда конденсатор 22 через резистор 24
J и открытый тринистор 29 зарядится до порога отпирания однопереходного транзистора 21, последний отпирается, и конденсатор 22 через резистор 27, симистор 31, транзистор 21 и резистор 28 перезаряжается. При
JJJ этом тринистор 29, а следовательно, и симистор 31 запираются. Реверсивный электродвигатель 1 оказывается подключенным к сети через конденсатор 37 и реверсируется. Поскольку в этом случае величина фазосдвигающей емкости равна емкости конденсатоsi pa 38 и имеет оптимальное значение, момент и скорость реверсивного электродвигателя 1 резко возрастают, и он начинает поднимать зонд. Через резистор 26 и диод 30 конденсатор 24 разряжается, и когда он разрядится, транзистор 21 откроется, включая тринистор 29 и симистор 31. Зонд опять опускается. Электромеханический регулятор уровня жидких и сыпучих сред характеризуется простотой конструкции и схемы управления, высокой точностью и надежностью работы, что позволяет найти ему практическое применение для контроля и регулирования уровня различных сыпучих и жидких сред во многих отраслях промышленности и сельского хозяйства. Формула изобретения Электромеханический регулятор уровня жидких и сыпучих сред, содержащий зонд на тросе, закрепленном на барабане, соединенном через механическую передачу с индикатором уровня, а через редуктор - с реверсивным электродвигателем, и блок управления, выполненный в виде последовательно соединенных реле времени и симисторного коммутатора, подключенных к источнику постоянного напряжения, индуктивно связанному с источником переменного напряжения, к одному из выводов которого подключены первые выводы двух обмоток реверсивного электродвигателя, а второй вывод первой обмотки реверсивного электродвигателя через конденсатор связан с вторым выводом источника переменного напряжения, отличающийся тем, что, с целью повышения надежности регулятора он содержит дополнительный конденсатор, одна обкладка которого подключена к второму выводу первой обмотки реверсивного электродвигателя, а вторая обкладка - к выходу симисторного коммутатора и второму выводу второй обмотки реверсивного электродвигателя. Источники информации, принятые во внимание при экспертизе 1.Цикерман Л. Я. и др. Измерение уровней жидкостей и сыпучих материалов в коммунальном хозяйстве, М., Стройиздат, 1964, с. 221-224, рис. 135. 2.Патент США № 3742307, кл. 318-482. 1972 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| Двухпозиционный регулятор | 1979 |
|
SU853618A2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Регулятор температуры | 1980 |
|
SU864262A1 |
| Регулятор уровня сыпучих материалов | 1981 |
|
SU1015342A1 |
| Регулятор | 1980 |
|
SU881703A1 |
| Автоматическое зарядно-тренировочное устройство | 1981 |
|
SU974466A1 |
| Реле времени | 1980 |
|
SU906003A1 |
| Сварочный полуавтомат | 1990 |
|
SU1754362A1 |
| Устройство для включения газоразрядной лампы | 1978 |
|
SU938418A1 |
708316
