1
Изобретение относится к области приборостроения, в частности к устройствам для измерения углов наклона, и может найти применение при выверо гных работах в машиностроении и монтаже, требующих высокую точность измерений с дистанционной передачей сигналов одновременно при нескольких направлениях, характеризующих угловые отклонения объекта в пространстве.
Известно устройство для измерения угла наклона, у которого в качестве измерительного органа, обеспечивающего дистанционные измерения, применен механотрон fl.
Однако измерительные возможности этого устройства ограничены применением только одного механотрона. Таким устройством нельзя одновременно измерять угловые отклонения объектов в двух взаимно перпендикулярных плоскостях.
Известно также устройство для измерения углов наклона с применением механотронов, которое помимо расположенных во взаимно перпендикулярных плоскостях механотронов содержит корпус с юстировочными винтами и маятниковый чувствительный элемент 2.
Недостаток этого устройства заключается в том, что его элементы не обеспечивают мобильной подстройки механотронов. В целом устройство неудобно в эксплуатации при производстве измерений во взаимно перпендикулярных плоскостях углов наклона объекта.
5 Целью изобретения является обеспечение удобства настройки и эксплуатации устройства в условиях мащиностроительного и монтажного производства. Поставленная цель достигается тем, что
10 устройство для измерения углов наклона, содержащее корпус с юстировочными винтами, маятниковый чувствительный элемент и расположенные во взаимно перпендикулярных плоскостях механотроны, снабжено
15 поворотными осями с рычагами, одним концом связанными с механотронами, а другим посредством рычагов - с юстировочными винтами.
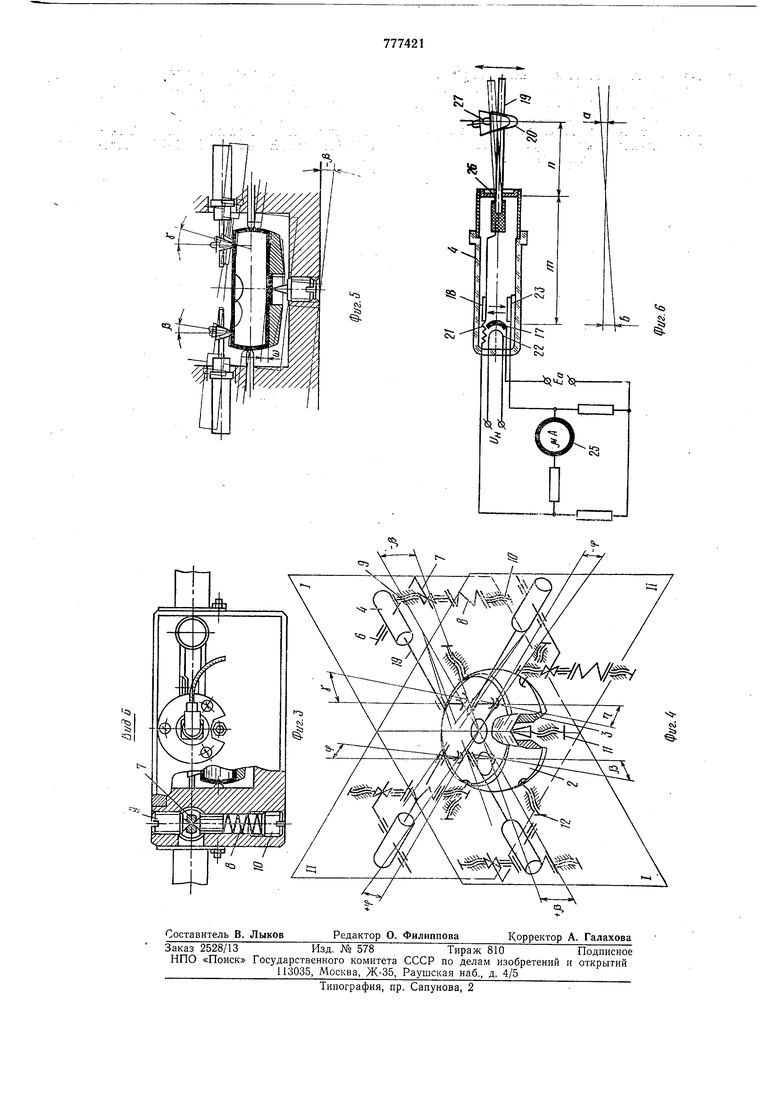
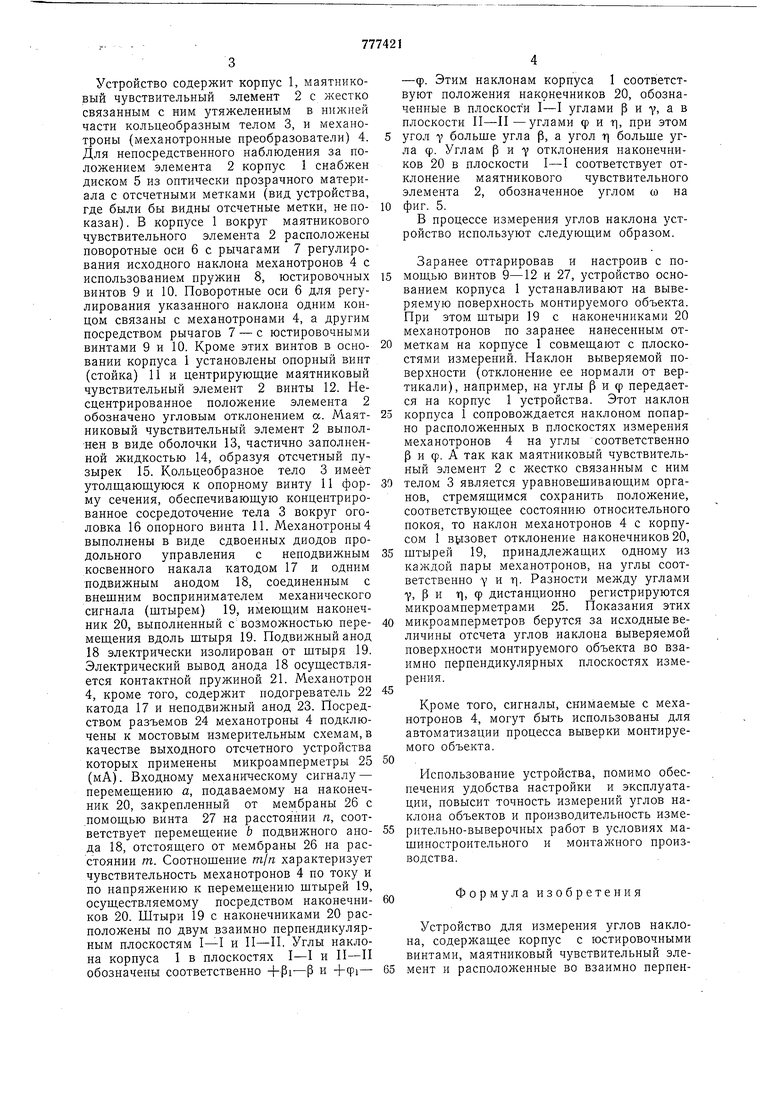
На фиг. 1 показано устройство, вид сбо20 ку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид по стрелке Б фиг. 1; на фиг. 4 - кинематическая схема устройства с углами отсчета в плоскостях I-I и И- П; на фиг. 5 - схема механизма измерения
25 углов наклона в плоскости I-I; на фиг. 6- принципиальная измерительная схема с двуханодным диодным механотроном. (Тонкими сплошными линиями на фиг. 1, 2, 4, 5, 6 показаны положения элементов устрой39 ства).
Устройство содержит корпус 1, маятниковый чувствительный элемент 2 с жестко связанным с ним утяжеленным в нижней части кольцеобразным телом 3, и механотроны (механотронные преобразователи) 4. Для непосредственного наблюдения за положением элемента 2 корпус 1 снабжен диском 5 из оптически прозрачного материала с отсчетными метками (вид устройства, где были бы видны отсчетные метки, не показан). В корпусе 1 вокруг маятникового чувствительного элемента 2 расположены поворотные оси 6 с рычагами 7 регулирования исходного наклона механотронов 4 с использованием пружин 8, юстировочных винтов 9 и 10. Поворотные оси 6 для регулирования указанного наклона одним концом связаны с механотронами 4, а другим посредством рычагов 7 - с юстировочными винтами 9 и 10. Кроме этих винтов в основании корпуса 1 установлены опорный винт (стойка) 11 и центрирующие маятниковый чувствительный элемент 2 винты 12. Несцентрированное положение элемента 2 обозначено угловым отклонением а. Маятниковый чувствительный элемент 2 выполнен в виде оболочки 13, частично заполненной жидкостью 14, образуя отсчетный пузырек 15. Кольцеобразное тело 3 имеет утолщающуюся к опорному винту 11 форму сечения, обеспечивающую концентрированное сосредоточение тела 3 вокруг оголовка 16 опорного винта 11. Механотроны4 выполнены в виде сдвоенных диодов продольного управления с неподвижным косвенного накала катодом 17 и одним подвижным анодом 18, соединенным с внешним воспринимателем механического сигнала (щтырем) 19, имеющим наконечник 20, выполненный с возможностью перемещения вдоль щтыря 19. Подвижный анод 18 электрически изолирован от щтыря 19. Электрический вывод анода 18 осуществляется контактной пружиной 21. Механотрон 4, кроме того, содержит подогреватель 22 катода 17 и неподвижный анод 23. Посредством разъемов 24 механотроны 4 подключены к мостовым измерительным схемам, в качестве выходного отсчетного устройства которых применены микроамперметры 25 (мА). Входному механическому сигналу - перемещению а, подаваемому на наконечник 20, закрепленный от мембраны 26 с .помощью винта 27 на расстоянии п, соответствует перемещение b подвижного апода 18, отстоящего от мембраны 26 на расстоянии т. Соотнощепие т/п характеризует чувствительность механотронов 4 по току и по напряжению к перемещению штырей 19, осуществляемому посредством наконечников 20. Штыри 19 с наконечниками 20 расположены по двум взаимно перпендикулярным плоскостям и II-II. Углы наклона корпуса 1 в плоскостях I-I и П-П обозначены соответственно +Pi-13 и -|-ф1-
-ф. Этим наклонам корпуса 1 соответствуют положения наконечников 20, обозначенные в плоскости I-I углами р и у, а в плоскости П-П-углами ф и т, при этом угол 7 больше угла р, а угол г больше угла ф. Углам р и 7 отклонения наконечников 20 в плоскости I-I соответствует отклонение маятникового чувствительного элемента 2, обозначенное углом ш на фиг. 5.
В процессе измерения углов наклона устройство используют следующим образом.
Заранее оттарировав и настроив с помощью винтов 9-12 и 27, устройство основанием корпуса 1 устанавливают на выверяемую поверхность монтируемого объекта. При этом щтыри 19 с наконечниками 20 механотронов по заранее нанесенным отметкам на корпусе 1 совмещают с плоскостями измерений. Наклон выверяемой поверхности (отклонение ее нормали от вертикали), например, на углы р и ф передается на корпус 1 устройства. Этот наклон корпуса 1 сопровождается наклоном попарно расположенных в плоскостях измерения механотронов 4 на углы соответственно Р и ф. А так как маятниковый чувствительный элемент 2 с жестко связанным с ним телом 3 является уравновещивающим органов, стремящимся сохранить положение, соответствующее состоянию относительного покоя, то наклон механотронов 4 с корпусом 1 вызовет отклонение наконечников 20, щтырей 19, принадлежащих одному из каждой пары механотронов, па углы соответственно Y и г|. Разности между углами у, р и Т1, ф дистанционно регистрируются микроамперметрами 25. Показания этих мпкроамперметров берутся за исходные величины отсчета углов наклона выверяемой поверхности монтируемого объекта во взаимно перпендикулярных плоскостях измерения.
Кроме того, сигналы, снимаемые с механотронов 4, могут быть использованы для автоматизации процесса выверки монтируемого объекта.
Нспользование устройства, помимо обеспечения удобства настройки и эксплуатации, повысит точность измерений углов наклона объектов и производительность измерительно-выверочных работ в условиях машиностроительного и монтажного производства.
Формула изобретения
Устройство для измерения углов наклона, содержащее корпус с юстировочными винтами, маятниковый чувствительный элемент и расположенные во взаимно перпендикулярных плоскостях механотроны, отличающееся тем, что, с целью обеспечения удобства настройки и эксплуатации устройства, оно снабжено поворотными осями с рычагами, одним концом связанными с механотронами, а другим посредством рычагов - с юстировочными винтами.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 261720, кл. G 01С 9/12, 1968.
2.Авторское свидетельство СССР № 553341, кл. Е 04С 21/18, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения параметров паза шарнирной вилки | 2020 |
|
RU2748863C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ СИММЕТРИЧНОСТИ ШПОНОЧНОГО ПАЗА СКВОЗНОГО ОТВЕРСТИЯ | 2000 |
|
RU2190186C2 |
| Устройство для определения углов наклона объектов | 1973 |
|
SU473050A1 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПАЗА, НЕСОПРЯЖЕННОГО С ОТВЕРСТИЕМ ДЕТАЛИ | 2012 |
|
RU2488075C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШПОНОЧНОГО ПАЗА ОТВЕРСТИЯ | 2001 |
|
RU2190187C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ СИММЕТРИЧНОСТИ ШПОНОЧНОГО ПАЗА СКВОЗНОГО ОТВЕРСТИЯ | 1999 |
|
RU2153151C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПАЗА, НЕ СОПРЯЖЕННОГО С ОТВЕРСТИЕМ ДЕТАЛИ | 2014 |
|
RU2559169C1 |
| Преобразователь линейных перемещений | 1991 |
|
SU1796864A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПАЗА НА ТОРЦЕ ВАЛА | 2012 |
|
RU2496097C1 |