Цель Достигается тем, что в устройство, содержащее генератор электрических колебаний, индикатор и регулируемый фазовращатель, механически связанный с лимбом для отсчета фазового сдвига, введены второй регулируемый фазовращатель, блок мажоритарной логики, два инерционных блока, два блока выделения нервой гармоники, лимб для отсчета двух величин постоянной времени, частоты и коэффициента усиления соответственно, эталонное фазосдвигающее звено, блок регулировки усиления, два инвертора, сумматор, блок выделения переменного сигнала, блок детектирования, блок сглаживания цульсаций и щесть коммутаторов, при этом генератор электрических колебаний подключен к одному из входов устройства, соединенного с входами эталонного фазосдвигающего звена и первого блока выделения первой гармоники, выход которого соединен с тремя входами первого коммутатора, первый выход которого соединен с входом второго регулируемого фазовращателя, механически связанного с лимбом для отсчета величины частоты, второй выход упомянутого коммутатора соединен с входом первого регулируемого фазовращателя, а третий выход коммутатора соединен с входом первого инерционного блока, механически связанного с первым лимбом для отсчета величины постоянной времени, причем второй вход устройства через второй коммутатор соединен с одним из входов второго блока выделения первой гармоники, механически связанной через второй лимб для отсчета величины постоянной времени с первым блоком выделения первой гармоники, а другой вход упомянутого блока через третий коммутатор подключен к выходу эталонного фазосдвигающего звена, при этом выход второго блока выделения первой гармоники через блок регулировки усиления, механически связанный с лимбом для отсчета величины коэффициента усиления, подключен к первому входу четвертого коммутатора непосредственно, а через первый инвертор - к второму и третьему входам упомянутого коммутатора, четвертый, пятый и щестой входы которого соединены с выходами первого и второго фазовращателей и выходом первого инерционного блока соответственно, а первый и второй выходы упомянутого коммутатора подключены к первому входу сумматора, два других входа которого соединены с пятым и шестым выходами упомянутого коммутатора, его третий и четвертый выходы соединены с первым и вторым соответственно входами блока мажоритарной логики, третий вход которого через последовательно соединенные второй инерционный блок и второй инвертор соединен с выходом блока мажоритарной логики и с четвертым входом сумl/iaropa, выход которого соединен с двумя
входами пятого коммутатора, первый йь1ход которого через блок выделения переменного сигнала соединен с вторым выходом пятого коммутатора и с двумя входами
щестого коммутатора, первый выход которого через последовательно соединенные блок детектирования и блок сглаживания пульсаций подключен к одному из входов индикатора, соединенного упругим входом
с вторым выходом щестого коммутатора.
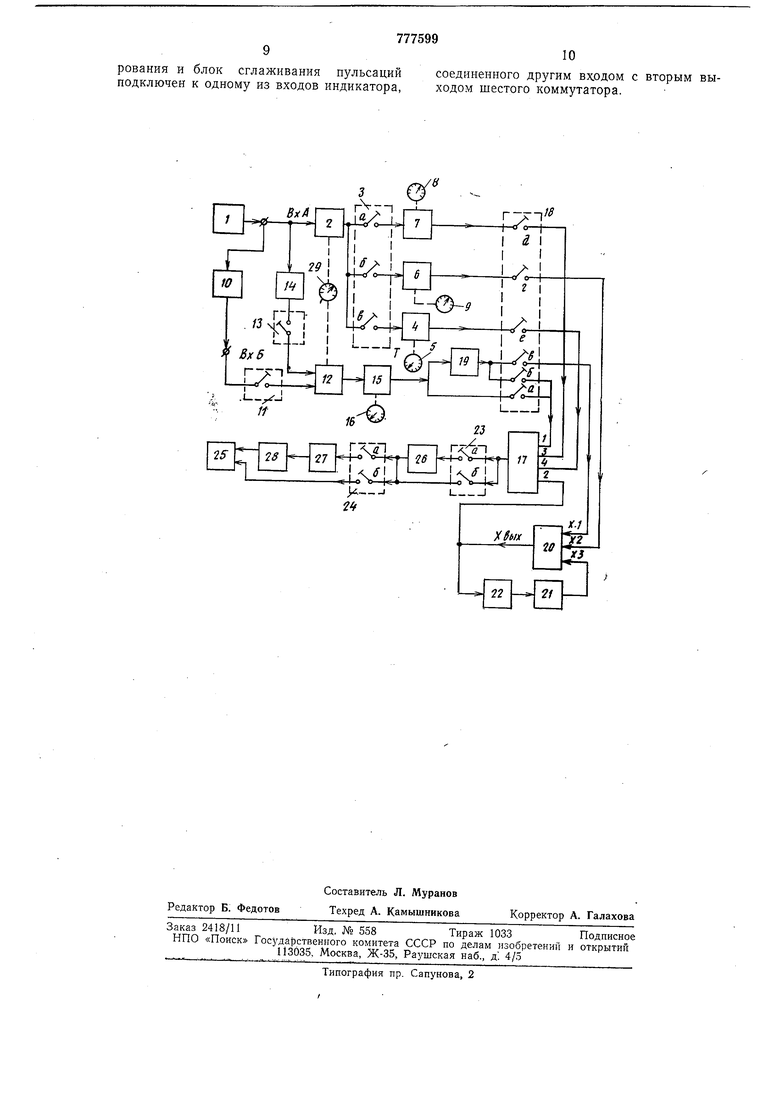
На чертеже представлена блок-схема устройства.
На схеме изображены генератор электрических колебаний 1, первый блок выделения первой гармоники 2, первый коммутатор 3, первый инерционный блок 4, первый лимб для отсчета величины постоянной времени 5, первый и второй фазовращатели 6 и 7, лимб для отсчета величин частоты 8,
лимб для отсчета фазового сдвига 9, динамический объект LO, второй коммутатор 11, второй блок выделения первой гармоники 12, третий коммутатор 13, эталонное фазосдвигающее звено 14, блок регулировки
усиления 15, лимб для отсчета величины коэффициента усиления 16, сумматор 17, четвертый коммутатор 18, первый инвертор 19, блок мажоритарной логики 20, второй инерционный блок 21, второй инвертор 22,
пятый и щестой коммутаторы 23 и 24, индикатор 25, блок выделения переменного сигнала 26, блок детектирования 27 и блок сглаживания пульсаций 28, второй лимб для отсчета величины постоянной времени 29.
Устройство работает следующим образом.
При измерении фазового сдвига сигналов на входе и выходе динамического объекта
10 сигнал с генератора электрических колебаний 1 поступает на вход А, а снимается сигнал с входа Б. Первый коммутатор 3 находится в положении«б, а четвертый коммутатор 18 - в положениях «в и «г.
При этом лимб 9, с которым механически связан фазовращатель 6, выведен на нуль. Сигнал с динамического объекта 10 через второй коммутатор 11, второй блок выделения первой гармоники 12, блок регулировки
усиления 15 и инвертор 19 поступает на
один вход блока мажоритарной логики 20,
а сигнал с фазовращателя 6-на другой.
На третий вход блока мажоритарной логики 20 поступает сигнал с выхода второго
инерционного блока 21, вход которого связан через второй инвертор 22 с выходом блока мажоритарной логики 20 цепью положительной обратной связи.
Свойство блока мажоритарной логики 20
таково, что в каждый момент времени он сравнивает три поступающих на вход сигнала и формирует на выходе блока сигнал, который является средним в данный момент времени. Логическая операция, осуществляемая блоком мажоритарной логики 20 для трех входов, может быть записана в виде: макс мин (), мин (,), мин () где АГь Х2, Хз - сигналы на входе блока мажоритарной логики 20; Хвых - сигнал на выходе этого блока. Поэтому в случае, когда фазовый сдвиг динамического объекта 10 не равен фазовому сдвигу фазовращателя б, выходной сигнал с блока мажоритарной логики 20 будет отличен от нуля. Этот сигнал поступит на 15 второй вход сумматора 17, а далее на индикатор 25. Если сигнал с генератора элек трических колебаний 1 имеет низкую частоту, т. е. амплитуда колебания стрелки индикатора 25 достаточна для на- 20 блюдения и если в сигнале с динамического объекта 10 отсутствует постоянная составляющая, тогда сумматор 17 соединен с индикатором 25 непосредственно; при этом нятый и шестой коммзтаторы 23 и 24 нахо-25 дятся в положении «5. При этом стрелка индикатора 25 будет совершать колебания относительно нулевого иоложения. По мере уменьшения фазового сдвигаЗО между сигналами с динамического объекта 10 и фазовращателя 6 посредством увеличения фазового сдвига фазовращателя б, которое осуществляется с помощью лимба 9, уменьшается и амплит гда колебаний35 стрелки индикатора 25. Лимбом 9 устанавливают такое значение фазового сдвига, при котором стрелка индикатора 25 имеет амплитуду колебаний, близкую к нулю. Это говорит о равенстве фаз указанных сигна-40 лов. При этом фазовый сдвиг, считываемый с лимба 9, будет равен фазовому сдвигу сигнала на выходе динамического объекта 10. В случае, когда сигнал с генератора45 электрических колебаиий 1 имеет высокую частоту колебаний, т. е. стрелка индикатора 25 практически не отклоняется, необходимо щестой коммутатор 24 перевести в положение «а. При этом блок детектиро-50 вания 27 и блок сглаживания иульсаций 28 обеспечат формирование постоянного сигнала, пропорционального амплитуде сигнала на выходе сумматора 17. Стрелка индикатора при этом не будет55 совершать колебаний, а будет отклоняться на постоянную величину, которую посредством фазовращателя 6 уменьщают до нуля Далее фазовый сдвиг динамического объ-60 екта 10 определяется аналогично режиму измерений на низких частотах. В случае наличия в измеряемом сигнале постоянных составляющих пятый коммутатор 23 необходимоустановить в положении65 5 10 «а, что обеспечит выделение переменной составляющей посредством блока выделения неременного сигнала 26. После измерения фазового сдвига фазовращатель бостается в положении минимального отклонения стрелки, и производят измерение отношения амплитуд сигналов на выходе и входе динамического объекта 10. Для этого необходимо первый коммутатор 3 оставить в том же положении, что и при измерении фазовых сдвигов, а четвертый коммутатор 18 перевести в положение «б и «г. При этом лимб 16, который механически связан с блоком регулировки усиления 15, первоначально выведен на нуль. Далее измерение отношения амплитуд на выходе и входе динамического объекта 10 производят аналогично измерению фазового сдвига, т. е. с помощью индикатора 25 фиксируют сигнал с выхода динамического объекта 10, а затем подбирают с помощью лимба 16 такое значение коэффициента усиления, при котором стрелка индикатора возвращается к нулю. В этом случае величипа коэффициеита усиления, считываемая с лимба 16, равна отношению амплитуд на выходе и входе динамического объекта 10. Если сигналы с выхода динамического объекта 10 имеют нелинейную форму, необходимо с помощью лимба 29, механически связанного с блоками выделения первой гармоники 2 и 12, устаиовить в соответствии с частотой надлежащее значение постояииой времени, которая обеспечивает выделение первой гармоники. Так как.ностоянные времени изменяются одинаково, как по первому, так и по второму блоку выделения первой гармоники 2 и 12, соответственно, то введение этих блоков в канал измерения не требует дополнительных пересчетов параметров динамического объекта 10. При измерении частоты первый коммутатор 3 переводят в положение «а, а четвертый коммутатор 18 - в положения «в и «5. Посредством третьего коммутатора 13 замыкают цепь между выходом эталонного фазосдвигающего звена 14 и вторым входом блока выделения первой гармоники 12, а посредством второго коммутатора 11 размыкают цепь между выходом динамического объекта 10 и первым входом блока выделения первой гармоники II. Далее измерение частоты производят аналогично измерению фазового сдвига, но вместо фазовращателя 6 используют фазовращатель 7, с которым механически связан лимб 8, проградуированный в величинах частоты, Так как фазовый сдвиг фазовращателя 7 зависит от частоты и постоянной времени Г, а эталонное фазосдвигающее звено 14 имеет, в нашем примере, постоянный фазовый сдвиг 90° на всех частотах, то для каждой измеряемой частоты имеется вполне определенная постоянная времени фазовращателя 7, при которой фазовый сдвиг
равен 90°. частотой и постоянной времени фазовращателя 7 существует онределенная зависнмость при фазовом сдвиге
90°, а нменно . Поэтому уравниванием фазовых сдвигов фазовращателя 7 и эталонного фазосдвигающего звена 14 мы определяем частоту колебаний, которую считываем с лимба 8.
При измеренни быстродействия, динамического объекта 10 на вход блока выделения первой гармоники 2 и вход динамического объекта 10 подают периодический сигнал прямоугольной формы с выхода генератора электрических колебаний 1. Первый коммутатор 3 переключают в полол ение «8, а четвертый коммутатор 18 - в положение «б и «е. При этом второй коммутатор 11 замкнут, а третий коммутатор 13 разомкнут, пятый и щестой коммутаторы 23 н 24 находятся в положении «а. Лимб 5, механически связанный с инерционным блоком 4, введен на нуль. Меняем постоянную времени инерционного блока 4 с помощью лимба 5 до тех пор, пока сигнал с выхода индикатора 25 не станет равным минимальному значению, т. е. пока стрелка индикатора не возвратится к нулю.
При этом внутреннее значение постоянной времени инерционного блока 4, считываемой с лимба 5, равно быстродействию динамического объекта 10, т. е. времени переходного процесса в секундах.
В данном устройстве точность индикации и измерение фазовых сдвигов и частот,ы не зависят от формы и амплитуды сигналов, что позволяет применять его для исследования линейных и нелинейных объектов, подверженных действию большого уровня щумов.
Кроме того, наличие инерционной положительной обратной связи блока мажоритарной логики 20 через инерционное звено 21 и инвертор 22 с единичным коэффициентом усиления позволяет повысить точность и чувствительность устройства в присутствии больших постоянных составляющих посредством запоминания сигнала на выходе блока мажоритарной логики 20 в течение каждого нолупериода, позволяет проводить динамический анализ источников тока, а также ускоряет процесс измерения.
Формула изобретения
Устройство для измерения параметров динамического объекта, содержащее генератор электрических колебаний, индикатор и первый регулкруемьтй. фазовращатель, механически связанный с лимбом для отсчета фазового сдвига, отличающийся тем, что, с целью повыщения точности, сокращения времени и упрощения измерений, в негр введены второй регулируемый фазовращатель, блок мажоритарной логики, два
инерционных блока, два блока выделения первой гармоники, пять лимбов для отсчета двух величин постоянной времени, частоты фазового сдвига и коэффициента усилення соответственно, эталонное фазосдвигающее звено, блок регулировки усиления, два инвертора, сумматор, блок выделения переменного сигнала, блок детектирования, блок сглаживания пульсации и шесть коммутаторов, при этом генератор электрических колебаний подключен к одному из входов устройства, соединенного с входами эталонного фазосдвигающего звена и первого блока выделения первой гармоники,
выход которого соединен с тремя входами первого коммутатора, первый выход которого соединен с входом второго регулируемого фазовращателя, механически связанного с лимбом для отсчета величииы частоты, пторой выход упомянутого коммутатора соединен с входом первого регулируемого фазовращателя, а третий выход коммутатора соединен с входом первого инерционного блока, механически связанного с первым
лимбом для отсчета величины постоянной времени, причем второй вход устройства через второй коммутатор соединен с одним из иходов второго блока выделения первой гармоники, механически связанного через
второй лимб для отсчета величин постоянной времени с первым блоком выделения первой гармоники, а другой вход упомящтого блока через третий коммутатор подключен к выходу эталонного фазосдвигающего звена, при этом выход второго блока выделения первой гармоники через блок регулировки з силения, механически связанного с лимбом для отсчета величин коэффициента усиления подключен к первому входу четвертого коммутатора непосредственно, а через первый инвертор - к второму и третьему входам упомянутого коммутатора, четвертый, пятый и щестой входы которого соединены с выходами первого и второго
регулируемых фазовращателей и с выходом первого инерционного блока соответственно, а первый и второй выходы упомянутого коммутатора подключены к первому входу сумматора, два других входа которого соединены с пятым и шестым выходами упомянутого коммутатора, а его третий и четвертый выходы соединены с первым и с вторым соответственно входами блока мажоритарной логики, третий вход которого
через последовательно соединенные второй инерционный блок и второй инвертор соединен с выходом блока мажоритарной логики и с четвертым входом сумматора, выход которого соединен с двумя входам.и
пятого коммутатора, первый выход которого через блок выделения переменного сигнала соединен с вторым выходом пятого коммутатора и с двумя входами щестого K.OJ.MyTa opa, первьщ выход которого через
последовательно соединенные блок детектирования и блок сглаживания пульсаций подключен к одному из входов индикатора, соединенного другим входом с вторым выходом шестого коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения сдвига фаз между двумя сигналами | 1978 |
|
SU702315A1 |
| Устройство для определения частотных характеристик динамических объектов | 1981 |
|
SU978067A1 |
| Способ преобразования переменного напряжения в постоянное и устройство для его осуществления | 1981 |
|
SU966827A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Нелинейное корректирующее устройство | 1979 |
|
SU866539A1 |
| Устройство определения азимута | 1984 |
|
SU1190746A2 |
| Устройство для измерения электрических колебаний | 1974 |
|
SU499538A1 |
| ФОРМИРОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ФАЗОВО-МОДУЛИРОВАННЫХ ИМПУЛЬСОВ ДЛЯ ВОЗБУЖДЕНИЯ РЕЗОНАНСНОЙ НАГРУЗКИ | 1991 |
|
RU2022447C1 |
| Синтезатор линейно-частотно-модулированныхКОлЕбАНий | 1978 |
|
SU830632A1 |
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1991 |
|
SU1841076A1 |
./5м
J -5x5
rv.
