(54) ИСКУССТВЕННАЯ СТОПА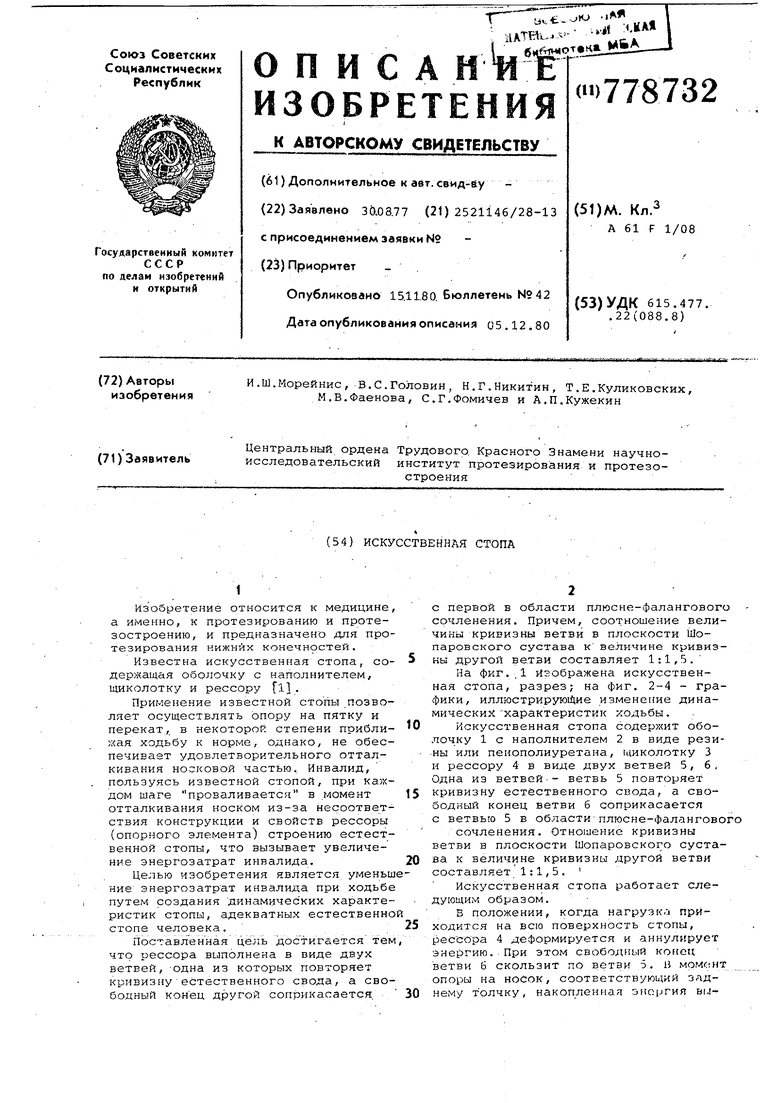
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННАЯ СТОПА | 2002 |
|
RU2209611C1 |
| Искусственная стопа | 1979 |
|
SU848023A1 |
| ПРОТЕЗ ГОЛЕНОСТОПНОЙ ЧАСТИ НОГИ | 1999 |
|
RU2153308C1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
| Искусственная стопа | 1990 |
|
SU1801417A1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1993 |
|
RU2012285C1 |
| Голеностопный узел протеза нижней конечности | 1987 |
|
SU1498490A1 |
| ИСКУССТВЕННАЯ СТОПА | 1999 |
|
RU2200513C2 |
| АДАПТИВНАЯ ИСКУССТВЕННАЯ СТОПА | 2000 |
|
RU2196547C2 |
| ИСКУССТВЕННАЯ СТОПА | 1995 |
|
RU2092135C1 |
1
Изобретение относится к медицине, а именно, к протезированию и протезостроению, и предназначено для протезирования нижних конечностей.
Известна искусственная стопа, содержащая оболочку с наполнителем/ щиколотку и рессору fl.
Применение известной стопы позволяет осуществлять опору на пятку и перекат, в некоторой степени приближая ходьбу к норме, однако, не обеспечивает удовлетворительного отталкивания носковой част1зю. Инвалид, пользуясь известной стопой, при каждом шаге проваливается в момент отталкивания носком из-за несоответствия конструкции и свойств рессоры (опорного элемента) строению естественной стопы, что вызывает увеличение энергозатрат инвалида.
Целью изобретения является уменьше ние энергозатрат инвалида при ходьбе путем создания динамических характеристик стопы, адекватных естественной стопе человека..
Поставленная цель достигается тем, что рессора выполнена в виде двух ветвей, -одна из которых повторяет кривизну естественного свода, а свободный конец другой соприкасается
с первой в области плюсне-фалангового сочленения. Причем, соотношение величины кривизны ветви в плоскости Шопаровского сустава к ве.личине кривизны другой ветви составляет 1:1,5.
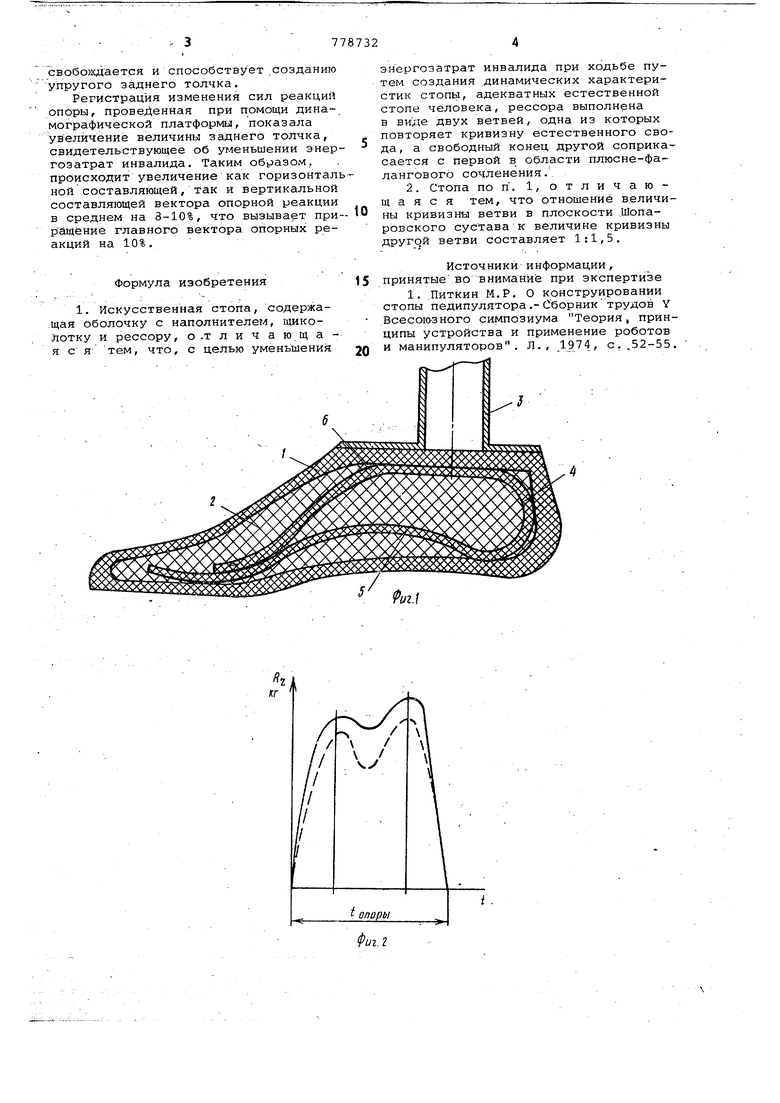
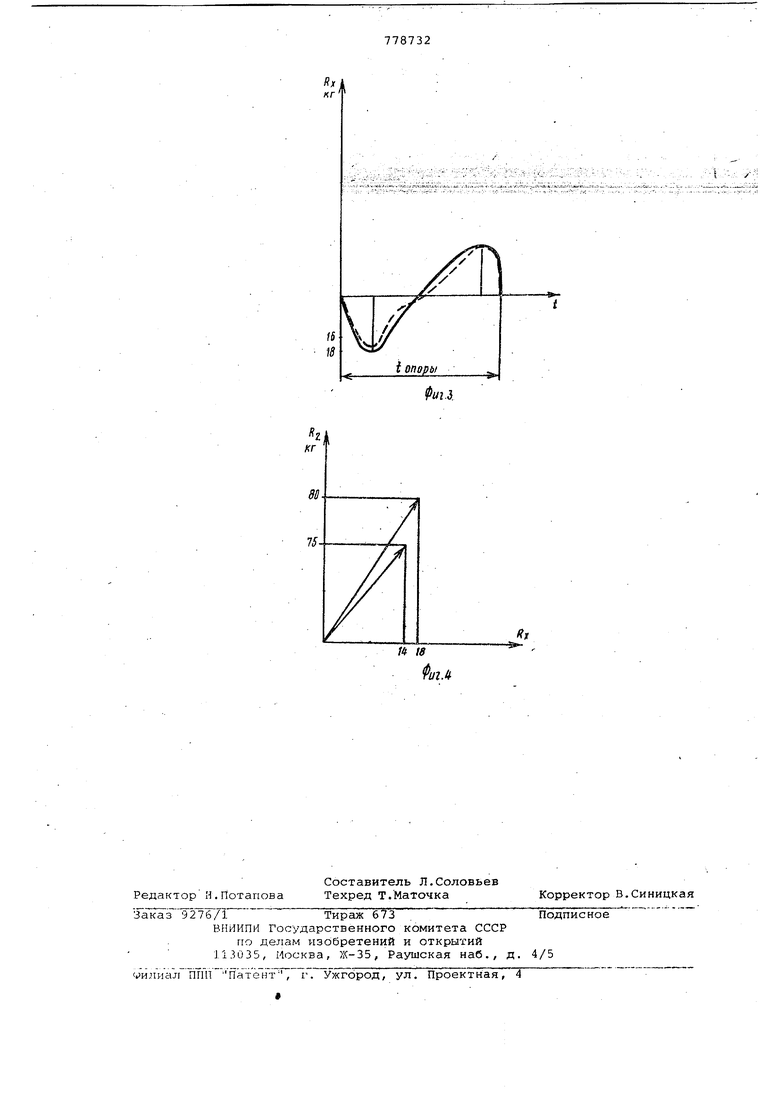
На фиг.,1 Изображена искусственная стопа, разрез; на фиг. 2-4 - графики, иллюстрирую1Дие изменение динамическиххарактеристик ходьбы.
10
Искусственная стопа содержит оболочку 1 с наполнителем 2 в виде резины или пенополиуретана, циколотку 3 и рессору 4 в виде двух ветвей 5, 6, Одна из ветвей-- ветвь 5 повторяет кривизну естественного свода, а сво15бодный конец ветви 6 соприкасается с ветвью 5 в об.пасти плюсне-фалангового
сочленения. Отношение кривизны ветви в плоскости Шопаровского сустава к величине кривизны другой ветви
20 составляет 1:1,5.
Искусственная стопа работает следующим образом.
В положении, когда нагрузка при25ходится на всю поверхность стопы, рессора 4 деформируется и аннулирует энергию. При этом свободный конец
ветви 6 скользит по ветви 5. в момент
опоры на носок, соответствующий заднему толчку, накопленная энергия вы30
свобождается и способствует .созданию упругого заднего толчка.
Регистрация изменения сил реакций опоры, проведенная при помощи динамографической платформы, показала увеличение величины заднего толчка, свидетельствующее об уменьшении энергозатрат инвалида. Таким обратном, происходит увеличение как горизонтальной составляющей, так и вертикальной составляющей вектора опорной реакции в среднем на 8-10%, что вызывает при- ращёнйё главного вектора опорных реакций на 10%.
Формула изобретения
энергозатрат инвалида при ходьбе путем создания динамических характеристик стопьт, адекватных естественной стопе человека, рессора выполнена в виде двух ветвей, одна из которых повторяет кривизну естественного свода, а свободный конец другой соприкасается с первой в области плюсне-фалангового сочленения.
Источники информации, принятыево внимание при экспертизе 1. Питкин М.Р. О конструировании стопы педипулятора.-Сборник трудов У Всесоюзного симпозиума Теория, принципы устройства и применение роботов и манипуляторов. Л., 1974, с.52-55.
IS
15f(f
