Изобретение относится к области медицинской техники, а именно к протезам нижних конечностей.
Известна искусственная стопа, включающая щиколотку, соединенную голеностопным шарниром с задним отделом, передний отдел стопы, связанный с задним отделом посредством шарового подшипника, задний буфер, а также упругий элемент в виде комплекта тарельчатых пружин, установленных на толкателе для накопления потенциальной энергии при перекате относительно переднего отдела стопы [1].
К недостаткам конструкции следует отнести ее сложность, приводящую к повышенному весу, а также постоянное точечное скольжение дистального конца толкателя относительно упорной плоской площадки переднего отдела стопы, что вызывает износ площадки и дополнительные потери энергии на трение.
Наиболее близким прототипом предполагаемого изобретения является искусственная стопа, включающая задний отдел стопы, передний отдел стопы, связанный с задним отделом посредством шарового шарнира, упругий элемент в виде пакета тарельчатых пружин, размещенный между передним и задним отделами, толкатель с установленным на нем упругим элементом, причем толкатель соединен с задним и передним отделами стопы посредством сферических пар с возможностью принимать при ходьбе различное наклонное положение в пространстве [2] (прототип).
К недостаткам конструкции следует отнести трудоемкость изготовления сферических пар, дороговизну и значительный вес стопы. Кроме того, в прототипе не предусмотрена возможность регулирования стопы на разную высоту каблука.
Целью изобретения является удешевление стопы и снижение трудоемкости ее изготовления, уменьшение массы стопы, возможность регулирования стопы на разную высоту каблука и под различную массу пациента и динамичность его ходьбы, а также сочетание стопы с любой универсальной щиколоткой, имеющей сменные переходники под любой вид соединения с голенью протеза.
Поставленная цель достигается за счет того, что адаптивная искусственная стопа содержит задний и передний отделы стопы, связанные посредством шарового подшипника с тремя степенями упругой подвижности, посаженного на ось, упругий элемент, размещенный между ними, и щиколотку. Она содержит упор-эксцентрик для регулирования установки стопы под разную высоту каблука, а упругий элемент выполнен в виде деформируемого в направлении сжатия и изгиба цилиндра, надавливающего на площадку, закрепленную в переднем отделе стопы, и имеет винт регулировки предварительного обжатия упомянутого цилиндра, при этом цилиндр выполнен из полужесткого полиуретана или резины.
Стопа может характеризоваться и тем, что шаровой подшипник размещен в области, соответствующей местоположению поперечного сустава предплюсны в естественной стопе.
Совокупность приведенных признаков позволяет обеспечить достижение технического результата - универсальности и удобства пользования, то есть изготавливать адаптивную искусственную стопу с возможностью ее регулирования на разную высоту каблука и под различную массу пациента и динамичность.
На чертеже изображена адаптивная искусственная стопа.
Стопа содержит задний отдел 1, передний отдел 2, в котором закреплена площадка 3, надавливающая на упругодеформируемый в направлении сжатия и изгиба цилиндр 4, выполненный из полужесткого полиуретана или резины, винт 5 регулировки предварительного обжатия упругого элемента, шаровой подшипник 6 с тремя степенями упругой подвижности, посаженный на ось 7 и связывающий передний и задний отделы стопы, упор-эксцентрик 8, регулирующий установку стопы на разную высоту каблука обуви, опорную пластину 9 переднего отдела, каркас оболочки 10, ремень 11, оболочку 12, упругий вкладыш 13, универсальную щиколотку 14 для любых видов переходников: 15 - для соединения с трубкой того или иного диаметра, 16 - для соединения посредством пирамидки и т.д.
Адаптивная искусственная стопа функционирует следующим образом. В начале опоры передний толчок амортизируется за счет упругости пятки. Подвижность заднего отдела стопы относительно щиколотки 14 осуществляется только в сагиттальной плоскости, что обеспечивает надежную устойчивость в наиболее опасный начальный период опоры на протез. При дальнейшем перекате на всей стопе и затем относительно ее переднего отдела достигается плавность и естественность движения благодаря тому, что передний отдел 2 стопы имеет три степени упругой подвижности относительно заднего отдела. Это достигается применением шарового подшипника 6, расположенного в области, которая в естественной стопе соответствует местоположению поперечного сустава предплюсны ("Шопарова сустава"), находится примерно над вершиной продольного свода. Указанная подвижность переднего отдела стопы обеспечивает удобство передвижения по неровной и наклонной поверхностям, хорошую адаптацию к любой опорной поверхности.
При перекате относительно переднего отдела упругий элемент 4 (полиуретан или резина) в процессе сжатия и изгиба накапливает потенциальную энергию, которая в заключительную фазу отталкивания протезом от опоры способствует усилению "заднего толчка".
Учет массы пациента и динамичности его ходьбы осуществляется путем изменения предварительного обжатия упругого цилиндра 4, для чего служит регулировочный винт 5.
В целях регулирования стопы под разную высоту каблука упор-эксцентрик 8 поворачивается на соответствующий угол, что позволяет придать переднему отделу стопы нужное положение по высоте относительно пятки.
Для возможности сочетания стопы с различными видами соединения с голенью протеза предусмотрена универсальная щиколотка 14, снабженная сменными переходниками: 15 - для соединения с трубкой, 16 - для соединения посредством пирамидки и др.
Преимущества предлагаемой адаптивной искусственной стопы перед прототипом следующие:
- возможность регулирования стопы на разную высоту каблука;
- возможность регулирования упругой характеристики полиуретанового или резинового цилиндра в зависимости от массы и походки пациента;
- возможность стыковки стопы с голенью протеза посредством любого вида используемых соединений благодаря сменным переходникам в универсальной щиколотке.
Техническое решение конструкции адаптивной искусственной стопы позволяет по сравнению с прототипом значительно упростить ее, повысить надежность в эксплуатации, снизить вес, повысить функциональность, а также расширить возможности ее использования в практике протезирования различных пациентов с культями нижних конечностей.
Источники информации
1. Патент РФ 2092135, кл. A 61 F 2/66, 1997.
2. Заявка 99106501/14(006911). Приоритет 31.03.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННАЯ СТОПА | 2002 |
|
RU2209611C1 |
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ | 2001 |
|
RU2200512C2 |
| Каркас протеза стопы | 2020 |
|
RU2741410C1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА СТОПЫ | 2004 |
|
RU2272598C2 |
| ИСКУССТВЕННАЯ СТОПА | 1999 |
|
RU2200513C2 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 2015 |
|
RU2596289C1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА СТОПЫ | 2014 |
|
RU2587956C2 |
| СТОПА ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1993 |
|
RU2061444C1 |
| ЗАМКОВЫЙ УЗЕЛ "КОЛЕНО-ГОЛЕНЬ" С ПОДРЕССОРЕННЫМ ПОДГИБАНИЕМ | 2000 |
|
RU2196546C2 |
| ИСКУССТВЕННАЯ СТОПА | 1995 |
|
RU2092135C1 |
Изобретение относится к области медицинской техники, а именно к протезам нижних конечностей. Стопа содержит задний отдел стопы, передний отдел стопы, связанный с задним отделом посредством шарового подшипника, и упругий элемент, например в виде полужесткого полиуретана в форме цилиндра, размещенный между передним и задним отделами стопы. Стопа содержит эксцентрик для регулирования стопы на разную высоту каблука, винт регулировки предварительного обжатия упругого элемента, а также универсальную щиколотку со сменными переходниками под любой вид соединения с голенью протеза. Технический результат заключается в обеспечении возможности регулирования стопы на разную высоту каблука и под различную массу пациента и динамичность его ходьбы. 1 з.п.ф-лы, 1 ил.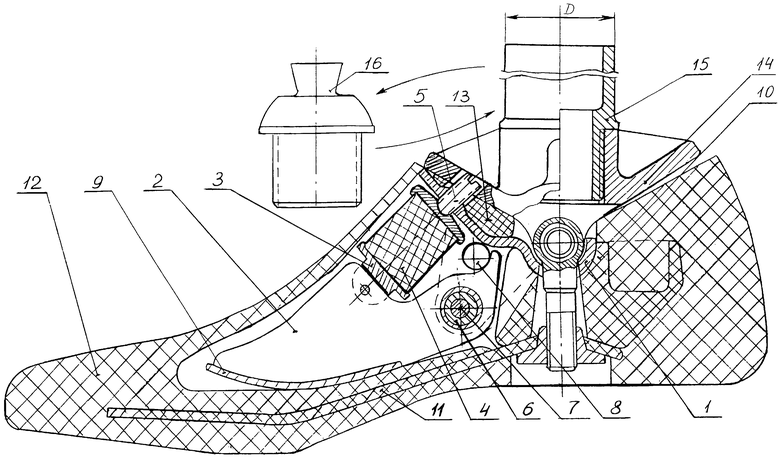
| ИСКУССТВЕННАЯ СТОПА | 0 |
|
SU311635A1 |
| Искусственная стопа | 1979 |
|
SU848023A1 |
| Искусственная стопа | 1985 |
|
SU1424831A1 |
| US 5769896 А, 23.06.1998 | |||
| КОСМЕТИЧЕСКОЕ СРЕДСТВО ДЛЯ УХОДА ЗА ПРОБЛЕМНОЙ КОЖЕЙ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2003 |
|
RU2241440C2 |

