(54) АППАРАТ ДЛЯ ПОЛУЧЕНИЯ ВЯЗКИХ СМЕСЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для получения смеси сыпучих и жидких материалов | 1977 |
|
SU631187A1 |
| Смеситель | 1979 |
|
SU880458A1 |
| Смеситель | 1980 |
|
SU904758A1 |
| Бипланетарный смеситель | 1978 |
|
SU778765A1 |
| Устройство для перемешивания | 1982 |
|
SU1057091A1 |
| Аппарат для перемешивания сыпучих и вязких материалов | 1978 |
|
SU768447A1 |
| Бипланетарный смеситель | 1977 |
|
SU764710A1 |
| Аппарат для перемешивания сыпучих и жидких материалов | 1977 |
|
SU673307A1 |
| Бипланетарный смеситель | 1983 |
|
SU1156724A1 |
| Устройство для перекачки смесей высоковязких компонентов | 1976 |
|
SU606007A1 |
1
Изобретение относится к области смесительной техники, предназначено для интенсификации процессов смесеприготовления высоковязких систем и может быть применено в различных отраслях промышленности, например хими- , чёской, пищевой и других, в ка1честве: реактора-смесителя или реактора для растворения.
Известны аппараты с циклоидальным движением мешалок, в которых мешалки за счет сложного циклоидального движения могут проходить через все зоны аппарата, создавая условия для получения равномерных сдвиговых де формаций перемешиваемой массы в6 всем объеме l .
Однако эти устройства не обеспечивают равномерного захвата массы по всему объему и со дна емкости, а также высокого качества смешения.
Известен аппарат для смешивания, включакзщий вертикальную емкость с расположенными в ней рабрчими органами в виде шнеков, угловая скорость вращения которых вокруг собственных осей непрерывно изменяется, что обеспечивает образование сложных нестабильных во времени потоков пе-ремешиваемых материалов внутри смесителя. Это достигается тем, что к :валу электродвигателя присоединена кулиса, на которой установлен ползун, шарнкрно связанный вертикальной осью с роликом, помещенным в криволинейный паз неподвижного кулачка (программоносителя), и с шатуном, соединенным через кривошип и зубчатую пару с валом поводка первой (пла10нетарной) ступени зубчато-рычажного механизма
Криволинейный профиль паза неподвижного кулачка определяет, режим движения шнеков по выбранной про15грамме. Однако данная конструкция обеспечивает при различных скоростных параметрах движения шнекоь перемещение их осей по циклоиде, что не .всегда создает оптимальный режим переме20шивания, особенно для высоковязких систем с резким колебанием вязкости в ходе технологического процесса. Кроме того, наличие кулачкового механизма с высшей парой усложняет
25 конструкцию, резко снижает ее надежность при этом увеличивается износ элементов высшей пары.
Цель изобретения - увеличение скорости перемешивания и повышение ка3Gчества готовой смеси за счет сложного спирального, движения шнековых мешалок .
Цель достигается тем, что кривошип кривошипно-ползунного механизма кинематически связан с шатунами, ползуны установлены на вращающихся нащзавляннцих и кинематически связаны с валами шнековых мешалок через вторую ступень, валы промежуточных сателлитов которой шарнирно соединены с шатунами, кинематически связанными с валами шнековых мешалок.
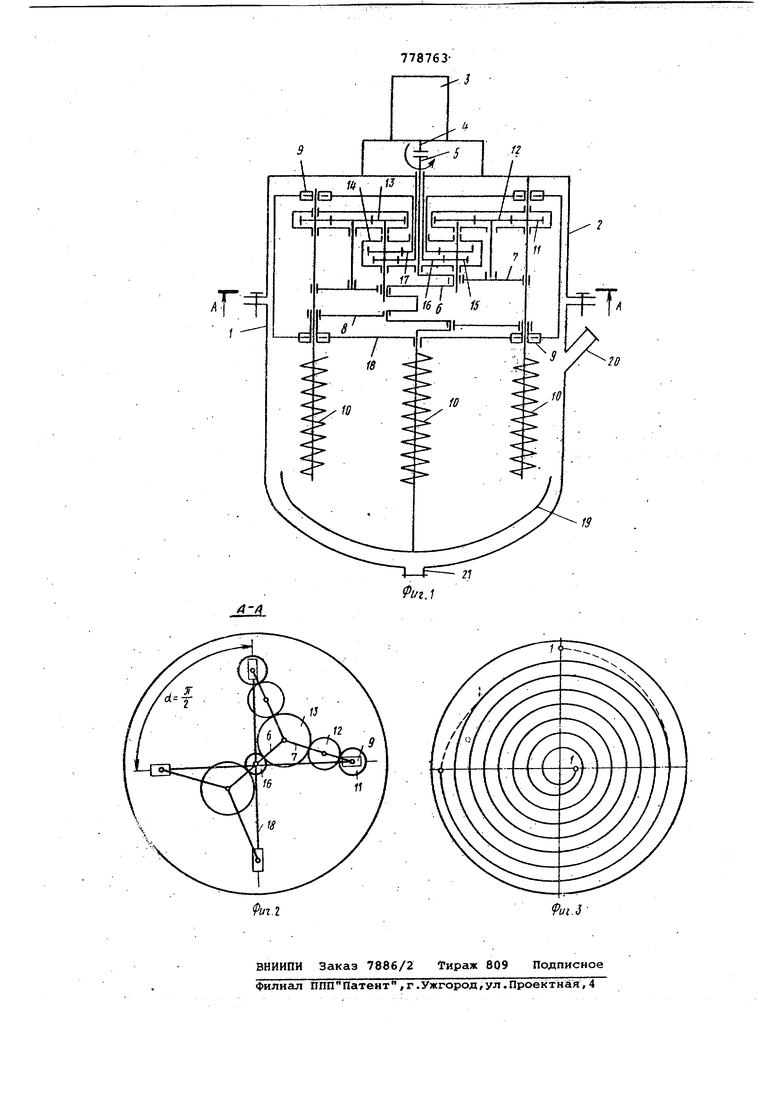
На фиг. 1 изображен аппарат, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на .фиг.. 3 - траектори движения оси шнека.
Аппарат содержит корпус 1 с крышкой 2, двигатель 3. Двигатель 3 соеднен выходным валом 4 с валом 5 кривошипа 6. КРИВОШИП б кинематически связан с шатунами 7 и 8. Шатуны 8 кинематически связаны с ползунами 9, а шатуны 7 с валами шнек9ВЬ1Х мешаддк 10. Валы шнековых мешалок 10 закреплены на сателлитах 11 бипланетарной (второй) ступени зубчато-рычажного механизма. Сателлиты 11 через промежуточные сателлиты 12 и шестерни 13 связаны с сателлитами 14 и 15 первой (планетарной) ступени. Валы промежуточных сателлитов 12 установлены в шарнирах на шатунах 7. Валы .шестерен 13 и сателлитов 14 и. 15 шарнирно соединены с кривошипом 6. Сателлиты 14 и 15 связаны с центргшьными шестернями 16 и 17, из которых шестерня 16 неподвижна (жестко соединена с крышкой аппарата), а шестерня 17 жестко соединена с направляющими 18, по которым перемещаются ползуны 9. На валу кривошипа имеется якорная мешалка 19. Загрузка осуществляется через бункер 20, а выгрузка через выгрузочное устройство 21.
Аппарат работает следующим образом.
Движение от двигателя 3 через выходной вал 4 передается на вал 5 кривошипа 6. Движение от кривошипа 6 передается на шатун 7 и 8. Шатун 7 перемещает валы шнековых мешалок 10 и ползуны 9 совершают аналогичное поступательное движение относительно направляющих 18. Вращение от кривошипа 6 передается на валы шестерен 13 и са1теллитов 14, 15. Сателлиты 15 связаны с неподвижной шестерней 16. Сате.ллиты 14 соединены с шестерней 17, а шестерни 13 с промежуточными сатетшитами 12. За счет этого шестерни 13 и сателлиты 14 и 15 совершают
планетарное движение. Причем сателлиты 14, 15 и шестерни 16 и 17 входят в первую (планетарную) ступень зубчатогрычажного механизма, а шее- терни 13, сателлиты 12 и 11 входят во вторую (бипланетарную) ступень. Движение от шестерни 13 передается промежуточным сателлитам 12 и через них сателлитам 11. Вращение сателлитов 11 передается на валы шнековых мешалок 10. Сложение поступательного движения осей мешалок 10 совместно с ползунами 9 и вращательного движения валов мешалок совместно с сателлитами 11 обеспечивает перемещение осей шнековых мешалок
по спиральным траекториям. Вращение якорной мешалки 19 обеспечивается за счет соединения ее вала с валом кривошипа 6. Загрузка аппарата происходит через бункер 20, а выгрузка
через устройство 21.
Предложенное устройство позволяет повысить производительность процесса перемешивания в 2 раза по сравнению с известными смесителями и улуллить качество готового продукта.
Формула изобретения
Аппарат для получения вязких смесей, содержащий вертикешьную емкость
0 с к)ышкой, двигатель и вертикальные шнековые мешалки, валы которых соединены с валом двигателя посредством двухступенчатого зубчато-рычажного механизма, состоящего из поводков
5 первой и второй ступеней, системы
зубчатых колес и кривошипно-ползунного механизма, отличающийс я тем, что, с. целью увеличения скорости перемешивания и повышения
0 качества готовой смеси, за счет сложного спирального движения шнековых мешаЛок, кривошип кривошипно-ползунного механизма кинематически связан с шатунами, ползуны установлены на вращающихся направляющих и кинематически связаны с валами шнековых мешалок через вторую ступень, валы проме уточн лх сателлитов которой шарнирно соединены с шатунами, кинематически связанными с валами шнековых
мешалок.
Источники информации, принятые во внимание при зкспертизе
