-. - Г .-. :;.;
. Изобретение относится к КонГрЬЛь но-измерительной технике И может быть использовано, в частности, для контроля за положением или перейейеййегм регулируняцйх органов системы упризяеняя 5 и защиты ядерных реакторов. ;
Известны бесконтактные датчики йоложения перемещающихся по заданному пути объектов, содержащие, например, подвижный сердечник, секционированные tO трансформаторно связанные между собой первичную и вторичную обмотки, причем секции вторичной сое динены попарно по дифференциальной схеме Ci.ts
Однако такие датчики недостаточно точны.
Наиболее близким к изобретению по технической сущности и достигаемсшу результату является датчик положения 20 перемещающегося объекта, содержащий гильзу из немагнитного материала, размещенный внутри нее сердечник, связываемый с контролируемым объектом и выполненный в виде набора чередующих- 25 ся магнитных и немагнитных элементов, размещенных с шагом S вдоль оси симметрии датчика,и установленные снаружи гиЛьзы катушки первичной и двух групп вторичных обмоток точного и ГРУ-30
бого отсчета, смещенных одна относительно другой вдоль оси датчика. Катушки первой группы вторичных обмоток, входящие в систему точного отсчета, соединены в трехфазную звезду и связаны через серводвигатель и сельси«ную систему передачи угла с указателем точного отсчета. Катушки другой группы вторичных обмоток включены в мостовую схему, содержащую компенсационный потенциоме.тр, подвижный контакт которого соединен через вторую сельСинную систему передачи угла с указателем грубого отсчета liZ .
Недостатке этого датчика является сложность его структурной схемы, наличие врацакяцихся частей и скользящих контактов (потенциометра), которые снижают надежность его работы, а также недостаточная точность иЭ-за сбоя синхронизации указаталей точного и грубого отсчета.
Цель изобретения - повышение точности контроля положения объекта и упрощение конструкции датчика.
Это Достигается тем, что катушки грубого отсчета установлены вдоль оси датчика с шагом S одна относительно другой, а катушки точного отсчета - с шагом (1 +.0,5а)5, где S суммарная длина одной пары магнитного и немагнитного элементов сердечника, а - любое число меньше 10.
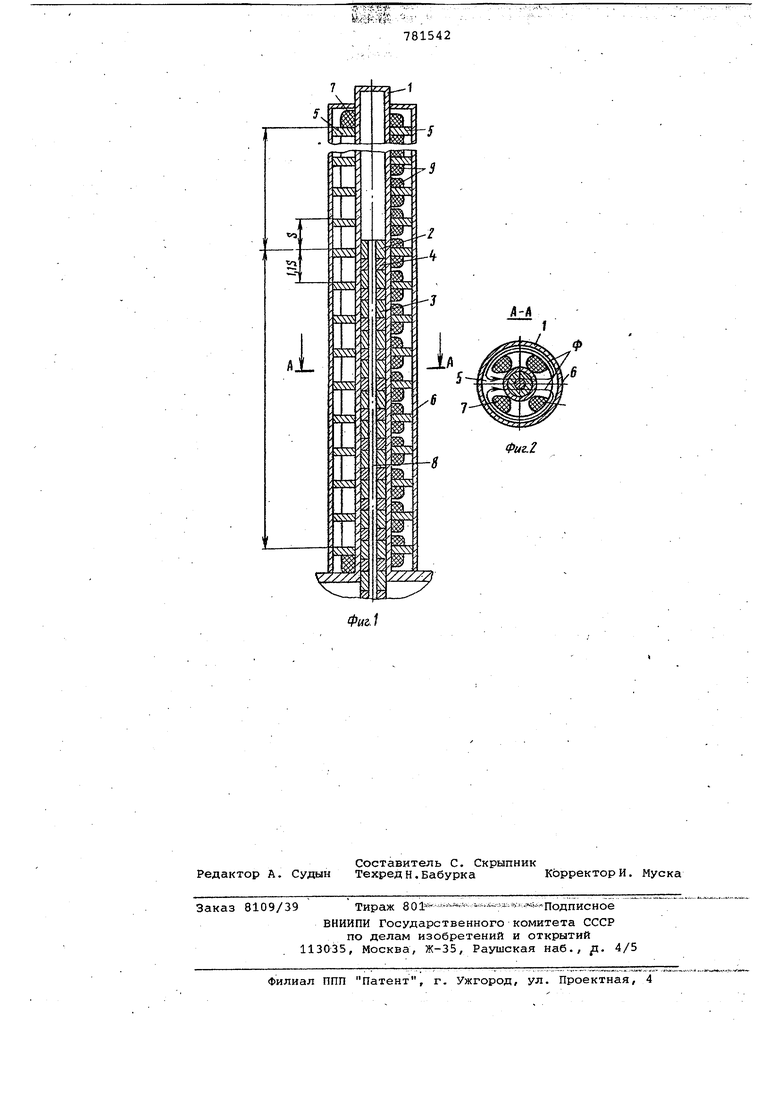
На фиг. 1 схематически изображен датчик, продольный разрез; на фиг. 2 сечение А-Л на фиг. 1..
Датчик положения содержит гильзу 1 с перемещающимся внутри нее сердечником 2, выполненньгм в виде набора черелующихся магнитных 3 и немагнитных 4 колец. Снаружи гильзы размещена одетая на полюсные выступы 5 внешнего ферромагнитного корпуса 6 катушка 7 первичной обмотки, расположенная слева от гильзы и надетая на самый верхний и самый нижний полюсные ВЫСТУПЫ 5, и группа катушек 8 и 9 вторичных обмоток, расположенных справа от гильзы одна над другой: десять катушек 8 первой группы, образующие систему точного отсчета, и расположенные выше них п катушек 9 второй группы, образующие систему грубого отсчета датчика.
Катушки грубого отсчета установ-лены с шагом S на длине nS, а катушки точного отсчета установлены с шагом (1 + 0,5a)S на длине 9,95. Выводы вторичных катушек подключены к многоразрядному цифровому счетчику (на чертеже не показан),
Счетчик положения работает следующим образом.
Магнитный поток Ф (фиг. 2), создаваемый катушкой 7 первичной обмотки, проходит по полюсным выступам 5, ферромагнитной гильзе 1 и в зависимости от положения подвижного сердечника 2по магнитным или немагнитным кольцам 3 или 4, возбуждая те катушки двух групп вторичных обмоток, возле которых располагается сердечник. Величина магнитного потока, пересекающего витки соответствующих катушек, становится больше, когда магнитный поток проходит по магнитному кольцу сердечника-, и меньше, когда он пересекает немагнитное кольцо.
Поскольку катушки 8 группы вторичных обмоток точного отсчета первыми оказываются на пути подвижного сердечника, то прежде, чем он приблизится к катушкам 9 группы вторичных обмоток грубого отсчета, происходит поочередное возбуждение всех катушек 8 точного отсчета.
Так как катушки точного отсчета установлены с шагом (1 + 0,5a)S, а магнитные участки (кольца 3) сердечника чередуются с шагом S, то максимальное значение напряжения в каждый момент времени йоявляется только на одной из катушек точного отсчета (той, которая в максимальной степени перекрыта магнитным кольцом сердечника) .
За начальное (нулевое) положение сердечника 2 принимается такое, когда
781542
сердечником перекрыты все десять катушек 8 точного отсчета, чему соответствует появление максимума напряже- , ния на последней (десятой) катушке точного отсчета.
Датчик работает следующим образом. При перемещении сердечника 2 вверх, BfcBue положения, соответствукдч.его нулевому отсчету, происходит поочередное возбуждение катушек 9 грубого отсчета. При этом расстояние, проходимое сердечником между моментами появления максимальных значений напряжения на двух соседних катушках 8 точного отсчета, равно ОД5, в том время, как расстояние, проходимое сердечником
5 между моментами появления максимальных значений напряжения на двух соседних катушках 9 грубого отсчета, равно S.
Таким образом, по величинам напряжений на катушках группы вторичных обмоток грубого отсчета определяется положение верхнего торца сердечника с точностью до величины S, а по величинам напряжений на катушках группы
5 вторичных обмоток точного отсчета положение того же торца с точностью до 0,15, .
If
Напряжения со вторичных обмоток 0 подаются на многоразрядный цифровой счетчик, с помощью которого идентифицируется перемещение объекта.
Формула изобретения
Датчик положения перемещающегося объекта, содержащий гильзу, из немагнитного материала, размещенный внутри нее сердечник, связываемый с контролируемым объектом и выполненный в виде набора чередующихся магнитных и .немагнитных элементов, размещенных с шагом S вдоль оси симметрии датчика, и установленные снаружи гильзы катушки первичной и двух групп
вторичных обмоток точного и грубого отсчета, смещенных одна относительно другой вдоль оси датчика, о тличающийся тем, что, с целью повышения точности контроля положения объекта и упрощения конструкции датчика, катушки грубого отсчета установлены вдоль оси датчика с шагом S одна относительно другой, а катушки,точного отсчета - с шагом
(1 + 0,5а)5, где S - суммарная длина . одной пары магнитного и немагнитного элементов сердечника, а - любое число меньше 10.
Источники информации, принятые во внимание при экспертизе
1. Акцептованная заявка Франции 2364432, кл. G 01 В 7/00, 1978.
2. Патент Великобритании 883781ткл. G 08 С 9/04, 1961 (прототип).
781542
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный преобразователь углового положения вала в код | 1978 |
|
SU765848A1 |
| Способ и устройство для измерения абсолютного положения линейного поступательного элемента | 2018 |
|
RU2747265C1 |
| ЭЛЕКТРИЧЕСКИЙ ТОРЦЕВОЙ НАБОРНЫЙ ГЕНЕРАТОР | 1997 |
|
RU2127939C1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Линейный сельсин | 2017 |
|
RU2678724C1 |
| ТОРЦЕВОЙ НАБОРНЫЙ ЭЛЕКТРОМОТОР | 2000 |
|
RU2213408C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| ГЕНЕРАТОР ДЛЯ ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2022 |
|
RU2797718C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1965 |
|
SU168031A1 |