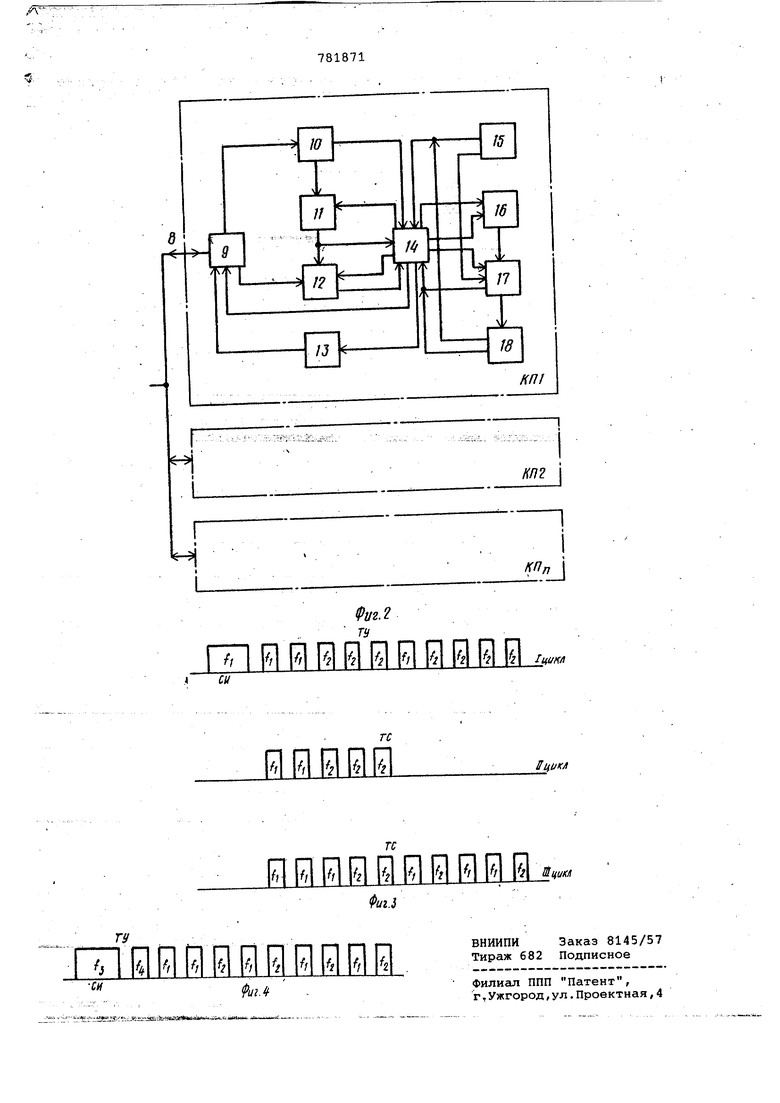
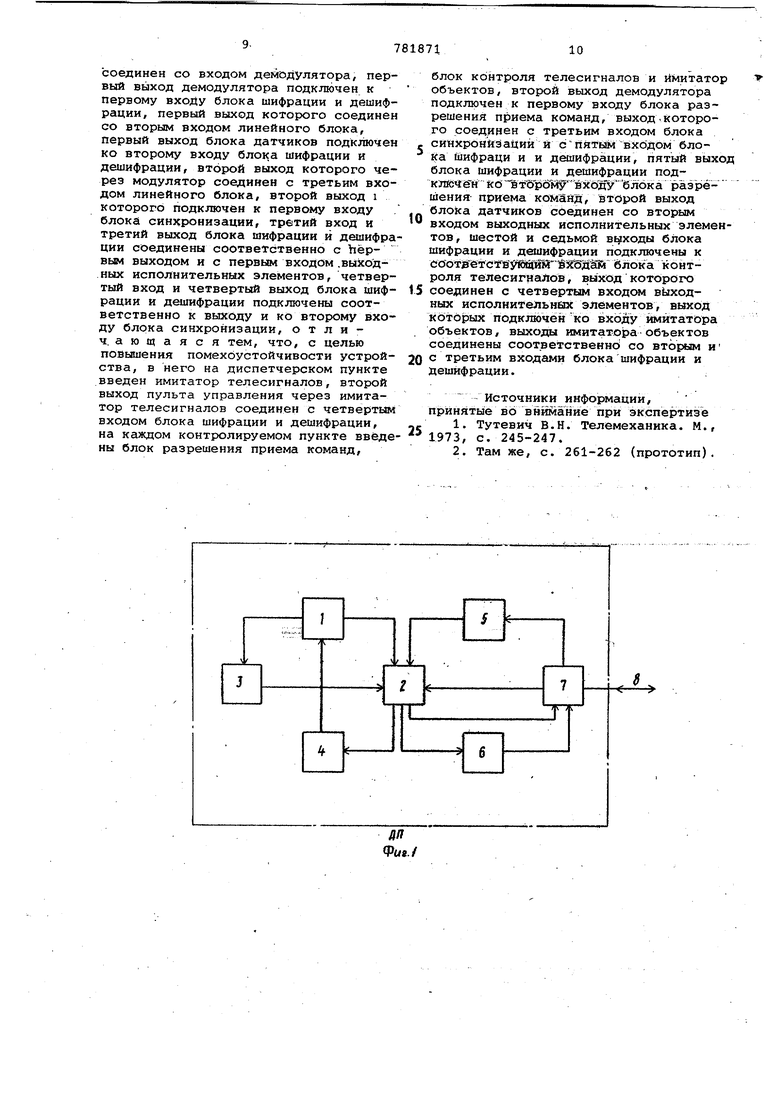
подключен к первому входу линейного блока, первый выход которого соединен со входом демодулятора, первый .выход демодулятора подключен к перво му входу блока шифрации и дешифрации первый выход которого соединен со вт рым входом линейного блока, первый выход блока датчиков подключен ко вт рому входу блока шифрации и дешифрац второй выход которого через модулятор соединен с третьим входом линейного блока, втброй выход которого подключен к первому входу блока синхронизации, третий вход и третий выход блока шифрации и дешифрации соединены соответственно с первым выходом и с первым входом выходных исполнительных элементов, четвертый выход блока шифрации и дешифрации подключены соответственно к выходу и ко второму входу блока синхронизации 2 .. Использование в описанной системе сочетания временных и частотных способов разделения каналов позволяет несколько увеличить быстродействие системы за счет увеличения используе мой полосы частот. Однако ввиду того, что ширина используемой полосы частот в большинст ве систем ограничена, время передачи команд телеуправления и получения сигналов телесигнализации остается значительно больше допустимого для ответственных объектов управления, особенно в случае обслуживания систе мой большого числа контролируемых пунктов. : - Помехоустойчивость такой системы увеличивается применением избыточных кодов, позволяющих обнаруживать или исправлять ошибки. Нолюбая избыточность кода увеличивает время передачи команд, поэтому для ответственных быстродействующих команд испо;льзование кодов с большей избыточностью неприемлемо. Цель изобретения - повышение поме хоустойчивости устройства, увеличени быстродействия, повышение надежности и расширение функциональных возможностей- системы. Указанная цель достигается тем, что в известное устройство, содержащее на диспетчерском пункте пульт управления, первый выход которого со единен с первым входом блока шифрации «г дешифрации, первый выход кото рого через блок исполнительных эле.ментор подключен ко входу пульта уп равления, линейный блок, первый выход которого соединен с линией;связ а второй выход через демодуля-гор под ключён ко второму входу блока шифра ции и дешифрации, второй выход кото рого через модулятор соединен с пер вХсздом лй нейного блока, третий выхо блока шифрации и дешифрации подклю чен ко второму входу линейного блок третий выход которого соединен с третьим входом блока шифрации и дешиф рации, на каждом контролируемом пункте выход линии связи подключен к первому Bxojjy линейного блока, первый выход которого соединен со входом демодулятора, первый выход демодулятора подключен к первому входу блока шифрации и дешифрации, первый выход которого соединен со вторым входом линейного блока, первый выход блока датчиков подключен ко второму входу блока шифрации и дешифрации, второй выход которого через модулятор соединен с третьим входом линейного блока, второй выход которого подключен к первому входу блока синхронизации, третий вход и третий выход блока шифрации и дешифрации соединены соответственно с первым выходом и с первым входом выходных исполнительных эл ментов, четвёртый вход и четвертый выход блока шифрации и дешифрации подключены соответственно к выходу и ко второму входу блока синхронизации, в него на диспетчерском пункте введен имитатор телесигналов, второй выход пульта управления через имитатор телесигналов соединен с четвертым входом блока шифрации и дешифрации, на каждом контролируемом пункте введены блсгк разрешения приема команд, блок контроля телесигналов и имитатор объектов, второй выход демодулятора подключен к первому входу блока разрешения приема команд, выход которого соединен с третьим входом : блока синхронизации и с пятым входом блока шифрации и доиифрации, пятый выход блока шифрации и дешифрации подключен ко второму входу блока разрешения приема команд, второй выход блока датчиков соединен со вторым входом выходных: исполнительных элементов, шестой и седьмой выходы блока шифрации и дешифрации подключены к соответствующимвходам блока контроля телесигналов, выход которого соединен с четвертым входом выходных ис- полнительных элементов, выход которых подключен ко входу имитатора объектов, выхода имитатора объектов, соединены соответственно со вторым и с третьим входами блока шифрации и дешифрации. На фиг. 1 показана блок-схема диспетчерского пункта; на фиг. 2 - блоксхема контролируемого пункта; на фиг. 3 - временная диаграмма вспомогательных команд и ответной сигнализации; на фиг. 4 - временная диаграмма команд управления и ответной сигнализации. Устройство содержит на диспетчерском пункте пульт 1 управления, блок 2 шифрации и дешифрации, имитатор 3 телесигналов, блок 4 выходных исполнительных элементов, демодулятор 5,-модулятор б и линейный блок 7, линию 8 связи, на каждом контролируемом
пункте линейный блок 9, демодулятор 10, блок 11 разрешения приема команд, блок 12 синхронизации, модулятор 13, блок 14 шифрации и дешифрации, блок ;15 датчиков, блок 16 контроля телесигналов, выходные исполнительные элементы 17 и имитатор 18 объектов.
Система телеуправления и телесигнализации работает следукяцим образом.
По технологической схеме управления грузоподъемными механизмами при монтаже крупнотоннажного оборудования выполняемые операции, а следовательно и передаваемые с.ДП команды удобно разбить на две группы: команды вспомогательные (кв) и команды управлеНИН (КУ). Выполнение каждой операции должно подтверждаться приходом телесигналов . Команды управления должны одновременно подаваться нескольким КП Диспетчер, посылая вспомогательные команды поочередно на несколько КП, подготавливает их к приему ответственных команд, осуществляющих управление монтажом крупнотоннажного оборудовани Для этого он нажимает кнопку на пульте 1 управления, с первого выхода пульта управления на первый вход блока 2 Шифрации и дешифрации поступают импульсы, соответствующие номеру КП и содержанию команды, которая должна быть передана. Блок 2 осущёствляет кодирование поступ1 вшей на него информации, после чего полученная кодовая комбинация, представляющая собой серию видеоимпульсов, с третьего выхода блока шифрации и дешифрации -поступает на вход модулятора б, где импульсы заполняются одной из двух рабочих частот, и с йыхода модулятора поступает на первый вход линейного блока 7, а затем через третий выход линейного блока вводится в линию В связи, в качестве которой в рассматриваемом случае служит электрическая сеть.
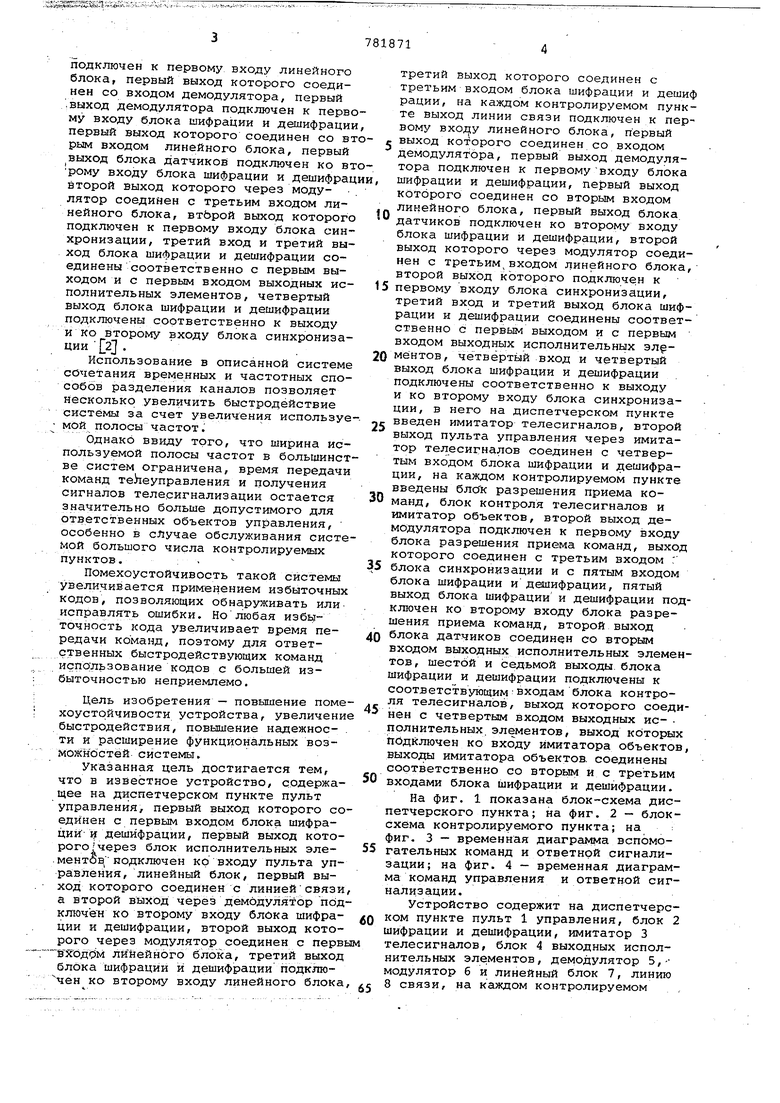
Пример кодовой комбинации одной из вспомогательных команд, поступающей в линию связи, показан на фиг. 3. Она состоит из стартового импульса (СИ), передаваемого в начале комбинации, адреса КП и характера операции, образуемых с помощью двоичного частотного
кода, использующего две рабочие частоты f и f 2 .
Из линии связи кодовая комбинация поступает на первый вход линейного ;блока 9 контролируемого пункта, с третьего выхода которого импульсы команды поступают на первый вход блока 12 синхронизации, выделяющего стартовый импульс. С выхода блока синхронизации подается импульс на первый вход блока 14 шифрации и дешифрации осуществляющий запуск блока 14. Со второго выхода линейного блока 9 кодовая комбинация попадает на вход демодулятора 10, где происходит отделение рабочих частот OJT импульсов комбинадии. С первого выхода демодулятора комбинация видеоимпульсов поступа на второй вход блока 14 шифрации и дшифрации, где производится ее декодирование, .после чего с четвертого выхда блока 14 шифрации и дешифрации подается импульс на первый вход выходных исполнительных элементов 17. На этом заканчивается первый цикл работы системы во вспомогательном режиме.
Во втором цикле работы блок 14 шифрации и дешифрации производит кодирование ответа с КП, повторяющего кодовую комбинацию адреса данного КП и информирующего ДП о том, что аодрес принят правильно. сГпятого выхода блока 14 кодовая комбинация попадает на вход модулятора 13, где заполняется рабочими частотами и. с выхода модулятора направляется на третий вход линейного блока 9, откуда через первый выход попадает в линию 8 связи.
Линейный блок 7 диспетчерского пункта через третий вход отбирает из линии связи кодовую комбинацию и через второй выход направляет ее на вход демодулятора 5, где происходит отделение импульсов комбинаций от рабочих частот. С выхода демодулятора комбинация видеоимпульсов поступает на третий вход блока 2, где расшифровывается, и с первого выхода блока.2 передается на вход выходных исполнительных эле ментов, с выхода которых поступает на вход пульта управления .
В течение третьего цикла работы в
.вспомогательном режиме с КП на ДП передаются два телесигнала, информирующие об исполнении команды на КП
.Работа системы в третьем цикле происходит следующим Ъбразом.
-С первого выхода выходных исполнительных элементов 17 на четвертый
:вход блока 14 шифрации и дешифрации поступает импульс, подтверждающий нсполнен.ие команды, переданной с ДП. С шестого выхода блока 14 импульс поступает на первый вход блока 11 разрешения приема команд управления. После этого КП переводится на работу в режим управления. Блок разрешения йриема команд управления открывает част отные каналы для приема частот fa и fд , участвуюсцих в построении команд управления. Одновременно блок 14 формирует кодовые комбинации двух телесигналов,.чтобы информировать ДП о выполнении на КП вспомогательной команды. С пятого выхода блока 1 кодовые комбинации сигналов поступают на вход модулятора 13, с выхода
которого кодовая комбинация, заполненная рабочими частотами поступает
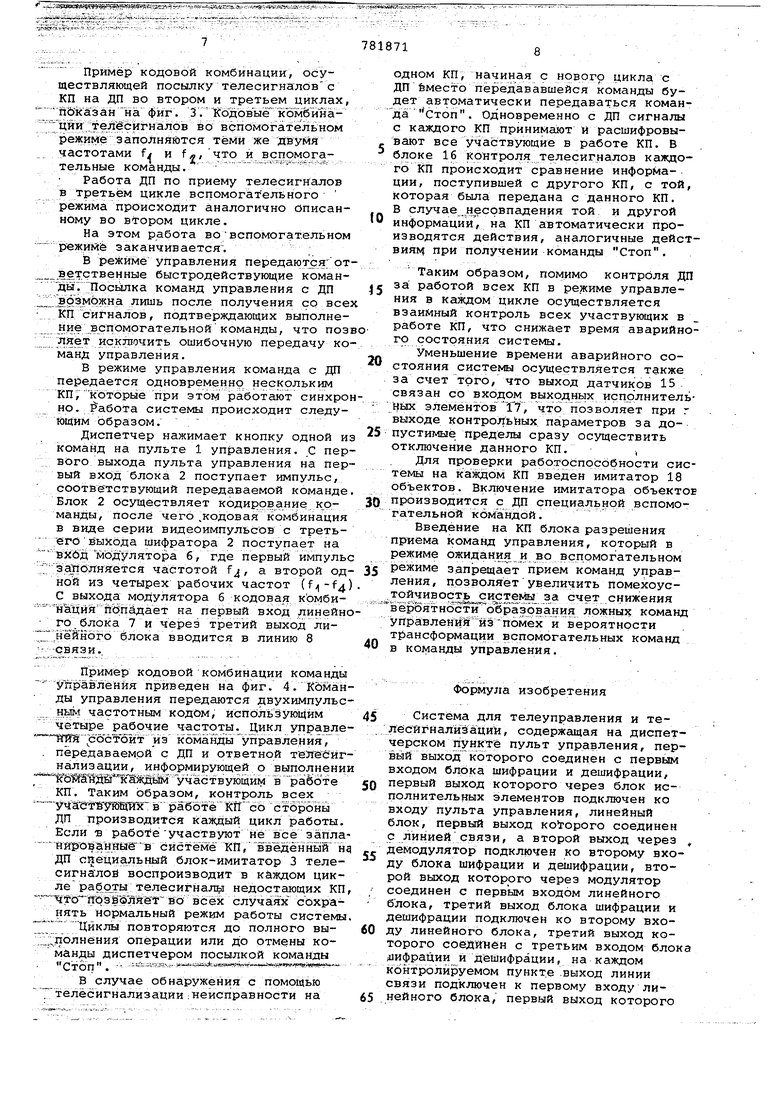
на третий вход лйнейного блока 9, а затем через первый выход линейного блока в линию 8 связи. Пример кодовой комбинации, осуществляющей посылку телесигналовс КП на ДП во втором и третьем циклах, пдказан на фиг. 3 Г 1Со довыё ко1иВй на Цйй теЛёсй гнйлЬв во вспомогательном режиме 3аполняются теми же двуйя , частотами f/ и f,что и вспомогательные команды. --- ,-,-.-„..,.4., .,,. Работа ДП по приему телесигналов в третьем цикле вспомогательного режима происходит аналогично описанному во втором цикле. На этом работа вовспомогательном режиме заканчивается . В ре5Кйме управления передаются;от ветственные быстродействуклцие коман ды. Посьшка команд управления с ДП возможна лишь после получения со все КП сигналов, подтверждающих выполнение вспомогательной команды, что ПОЗ Лйет исключить ошибочную передачу ко манд управления. В режиме управления команда с ДП передается одновременно нееколькши КП, которые при этбм работают синхро но, абосга системы происходит следующим образом. Диспетчер нажимает кнопку одной и команд на пульте 1 управления. .С пер вого выхода пульта управления на пер вый вход блока 2 поступает импульс, соОтветствующий передаваемой команде Блок 2 осуществляет кодирование к оманды, после чего ,кодовая комбинация в виде серии видеоимпульсов с третьего выхода шифратора 2 поступает на вхбдмодулятора б, где первый импуль за поляяется частотой f, а второй од ной из четырех рабочих частот (iцС выхода модулятора 6 кодовая комби наЦйя йопйдает на первый вход динейн го блока 7 и через третий выход ли ГДеЙнбго блока вводится в линию 8 --связи. Пример кодовой комбинации команды Управлёнйя приведен на фиг. 4 .Команды управления передаются двухимпульсным частотньлм кодом, испольЭующйм четыре рабочие частоты. Цикл управле ЙШ сбсТбит из комавдыуправления, . передаваемой с ДП и ответной теМёбйгнализации, информирующей о выполнении ТШШ1ШГ1 1 СйШучаствующйм в р аботе КП. Таким образом, контроль всех .-уча:е 6 й)ЩйзГ 13 работе cf ёроны ДП производится каждый цикл работы. Если Б работеучаствуют не всё заплаййров;ан;наё в сйстёмё КП, введённьайнд ДП специальный блок-имитатор 3 телесигналой воспроизводит в каждом цикле ра5.оты: телесигналы недостающих КП Ч сгйЬвв(&лйёТ fib всех случаях сохранять нормальный режим работы системы 1Хйклы повторяются до полного вы;;::;полнения операции или до отмены команды диспетчером посылкой команды (|,-,i It - . ,,., w:.dii%ii;;iift)« i J« - « ИЧ« ( Стоп . - --- - В случае обнаружения с помощью телесигнализации:неисправности на
8 одном КП, начиная с нового цикла с ДПбместо передававшейся команды будет автоматически передаваться команда Стоп. Одновременно с ДП сигналы с каждого КП принимают и расшифровывают все участвующие в работе КП. В блоке 16 контроля телесигналов каждого Кп происходит сравнение информации, поступившей с другого КП, с той, которая была передана с данного КП. В случае несовпадения той и другой информации, на КП автоматически производятся действия, аналогичные действиям при получении команды Стоп. Таким образом, помимо контроля ДП за работой всех КП в режиме управления в каждом цикле осуществляется взаимный контроль всех участвующих в работе Кп, что снижает время аварийного состояния системы. Уменьшение времени аварийного состояния системы осуществляется также за счет того, что выход датчиков 15 связан со входом выходнь1Х исполнительHbjx элементов Т, что позволяет при г выходе контрольных параметров за допустимые пределы сразу осуществить отключение данного КП. , Для проверки работоспособности системы на каждом КП введен имитатор 18 объектов. Включение имитатора объектов производится с ДП специальной вспомогательной k6мaнjE dй. Введение на КП блока разрешения приема команд управления, который в режиме ожидания и во всдрмогательном режиме запрещает прием команд управления, позволяет увеличить помехоустойчивость и стемы за счет снижения веЕЮятн6ст1Робразования ложных команд уПра:влениЖ из - помех и вероятности трансформации вспомогательных команд в команды управления. Формула изобретения Система для телеуправления и теЛёс;йгйалй§аций, содержащая на диспетчерском пункте пульт управления, первь1й выход которого соединен с первым входом блока щифрации и дешифрации, первый выход которого через блок исполнительных элементов подключен ко входу пульта управления, линейный блок, первый выход когорого соединен с линией связи, а второй выход через , демодулятор подключен ко второму входу блока шифрации и дешифрации, второй выход которого через модулятор соединен с первым входом линейного блока, третий выход блока шифрации и дешифрации подключен ко второму входу линейного блока, третий выход которого соединен с третьим входом блока дафрации и дешифрации, на каждом контролируемом пункт.е .выход линии связи подключен к первому входу линейного блока, первый выход которого
соединен со входом демодулятора, первый выход демодулятора подключен к первому входу блока шифрации и дешифрации, первый выход которого соединен со вторым входом линейного блока, первый выход блока датчиков подключен ко второму входу блока шифрации и дешифрации, второй выход которого через модулятор соединен с третьим входом линейного блока, второй выход i которого подключен к первому входу блока синхронизации, третий вход и третий выход блока шифрации и дешифрации соединены соответственно с hepвым выходом и с первым входом .выходных исполнительных элементов, четвертый вход и четвертый выход блока шифрации и дешифрации подключены соответственно к выходу и ко второму входу блока синхронизации, о т л и ч, ающаяся тем, что, с целью повышения помехоустойчивости устройства, в него на диспетчерском пункте введен имитатор телесигналов, второй выход пульта управления через имитатор телесигналов соединен с четвертым входом блока шифрации и дешифрации, на каждом контролируемом пункте введены блок разрешения приема команд.
блок контроля телесигналов и йМитатор объектов, второй выход демодулятора подключен к первому входу блока разрешения приема команд, выход.которого соединен с третьим входом блока синхронизации и спятым входом блока Шифраци и и дешифра.ции, пятый выход блока шифрации и дешифрации подклЮЧё н 1сбТвтб1)6м$ ШходУ Ъ шения приема команд, второй выход блока датчиков соединен со вторым входом выходных исполнительных элементов, шестой и седьмой блока шифрации и дешифрации подключены к соотв ётсГвЯШйй1 йХШШ блока контроля телесигналов, выход которого
соединен с четвертым входе вУходных исполнительнах элементов, выход которых подключён ко входу имитатора объектов, выходы имитатора объектов соединены соответственно со вторым и
с третьим входами блока шифрации и дешифрации.
Источники информации, принятые во ввййа ние при экспертизе Тутевич В.Н. Телемеханика. М., 1973, с. 245-247.
2. Там же, с. 261-262 (прототип).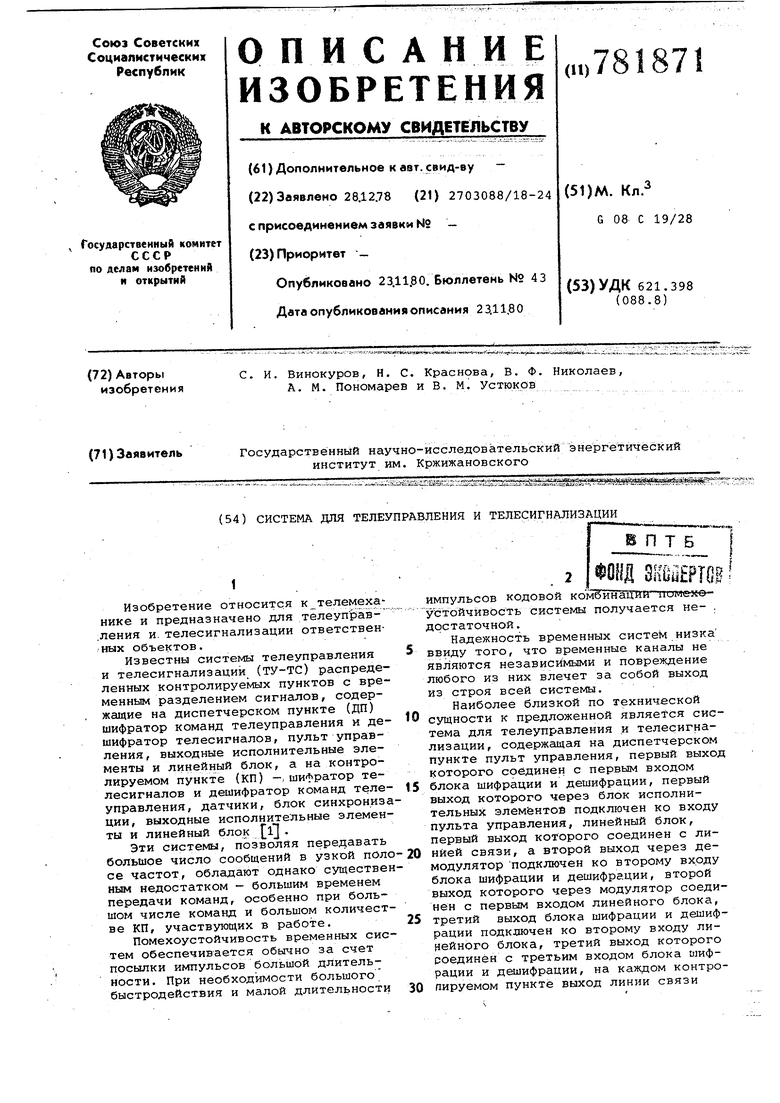

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для телеуправления иТЕлЕСигНАлизАции пО СилОВыМРАСпРЕдЕлиТЕльНыМ СЕТяМ | 1979 |
|
SU824261A1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
| Система телемеханики для управления рассредоточенными объектами | 1977 |
|
SU743004A1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ | 1995 |
|
RU2111545C1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| УСТРОЙСТВО ТЕЛЕИЗМЕРЕНИЯ ДЛЯ РАССРЕДОТОЧЕННЫ | 1973 |
|
SU386423A1 |
| Устройство телесигнализации | 1983 |
|
SU1149297A1 |
| УСТРОЙСТВО для ТЕЛЕИЗМЕРЕНИЯ | 1972 |
|
SU337799A1 |
| Устройство передачи информации | 1970 |
|
SU578648A1 |
| Устройство для телеконтроля | 1990 |
|
SU1732366A1 |