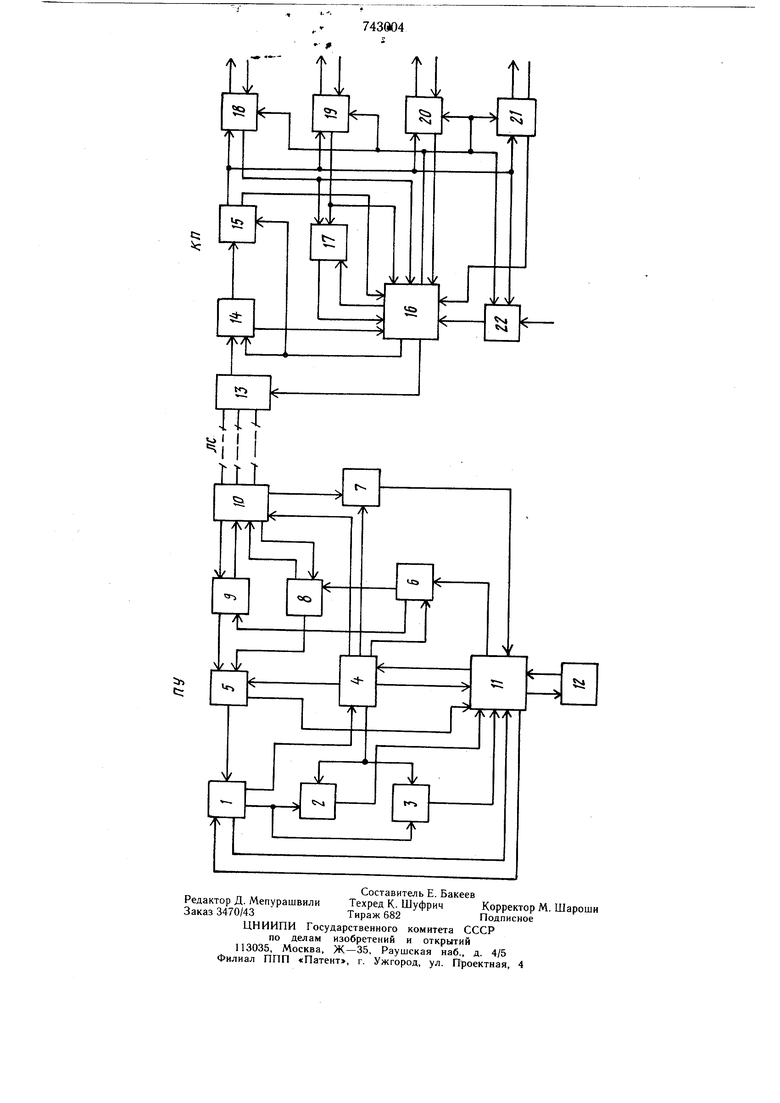
Изобретение относится к области телемеханики и может быть применено для телемеханизации объектов нефтяной и газовой промышленности. Известны системы для телемеханизации рассредоточенных объектов, содержапдие общийпункт управления (ПУ) и ряд контролируемых пунктов (КО), в которых ПУ содержит диспетчерский пункт, блоки выбора адреса КП, формирования команд, приоритета выдачи команд, исключения объектов, приема и проверки информации, шифратор, дешифратор, блок замера дебита, преобразователь дооичного кода в двоично-десятичный, преобразователь частоты в код, линейный узел, коммутатор направления и устройство обработки телемеханической информации или вычислительную машину, а КП содержит блоки приема и проверки информации, запоминания полученной информации, замера дебита нефтяных скважин, шифратор, дешифратор, блоки измерения рабочего давления, формирования сигнала ТС линейный узел l. Недостатки известной системы заключаются в следующем: -отсутствие воз.можности применения на объектах (скважинах) газлифтного способа добычи нефти; -сравнительно узкая область применения;-нерациональное использование линии связи и вычислительных машин (ВМ); -сравнительно ограниченные функциональные возможности. Наиболее близким по технической сущности к предложенному является система телемеханики для автоматического управления рассредоточенными объектами, пункт управления которого содержит диспетчерский пульт, первый выход которого соединен с первыми входами блока выбора адреса и блока формирования команды, блок управления, первые выходы которого соединены со вторыми входами блока выбора адреса, блока формирования команды, второй, третий и четвертый выходы - с первыми входами блоков приема и проверки информации, преобразователя частоты в код и шифратора,. второй вход блока приема и проверки информации соединен с первым выходом линейного блока, первый вход которого соединен с первым выходом шифратора, вторые вход и выход первого линейного блока подключены к первому входу и к первому выходу коммутатора направления, второй вход преобразователя частоты в код соединен со вторым выходом коммутатора направления, второй вход и третий выход которого подключены к линии связи, и вычислительную машину, а каждый из контролируемых пунктов содержит линейный блок, первый вход и первый выход которого соединены с линией связи, второй выход подключен к первому входу блока приема и проверки информации, второй вход соединен с первым выходом блока управления, первый выход блока приема и проверки информации соединен с первым входом блока управления, дешифратор, к первому входу которого подключен второй выход блока управления и второй вход блока приема и проверки информации, а первый выход подключен к первым входам первого и второго блоков измерения и блока формирования телесигналов, второй, третий и четвертый входы блока управления соединены с первыми выходами первого и второго блоков измерения и блока формирования телесигналов, второй вход и первый выход первого и второго блоков измерения подключены к соответствующим выходам устройства, первый вход блока формирования телесигналов соединен с первым входом устройства 2J. Недостатком известной системы являются ограниченные функциональные возможности, затрудняюш:ие его использование для телемеханизации рассредоточенных объектов нефте- и газодобычи, которые эксплуатируются газлифтными способами. Целью изобретения является расширение функциональных возможностей системы. Поставленная цель достигается тем, что в устройство на пункте управления введены второй линейный блок и блок сопряжения, первый, второй, третий и четвертый выходы которого соединены соответственно с первым входом блока управления, со вторым входом шифратора, со вторым входом диспетчерского пульта и с первым входом вычислительной машины, с первого по седьмой входы блока сопряжения соответственно под ключены к пятому выходу блока управления, к первому выходу блока приема и проверки информации, к выходу блока выбора адреса, к выходу блока формирования команды, ко второму выходу диспетчерского пульта, к выходу преобразователя частоты в код и к выходу вычислительной машины шестой выход блока управления подключен к третьему входу коммутатора направлений, а второй вход - к третьему выходу диспетчерского пульта, третий вход которого соединен с вторым выходом блока приема и проверки информации, первые выход и вход второго линейного блока соединен с соответствующими четвертыми входом и выходом коммутатора направления, а вторые вход и выход второго линейного блока соединены с третьим входом блока приема и проверки информации и со вторым выходом шифратора, в состав контролируемого пункта введены третий блок измерения, блок регулирования и преобразователь частоты в код, второй выход блока приема и проверки информации подключен ко второму входу дешифратора, пятый и шестой выходы блока управления подключен к первому входу преобразователя частоты в код и к первому выходу третьего блока измерения, первый выход дешифратора, соединен с первыми входами третьего блока измерения и блока регулирования, седьмой и восьмой входы блока управления соединены соответственно со вторым выходом дешифратора, с первым выходом блока регулирования, а третий выход блока управления - с первым входом преобразователя частоты в код, вторые входы и выходы третьего блока измерения и блока регулирования соединены с выходами устройства, первые выходы первого и второго блоков измерения подключены соответственно ко второму и третьему входам преобразователя частоты в код, управляюший выход блока управления подключен к соответствуюшим входам блоков измерения, блока регулирования и блока формирования телесигналов. Устройство содержит пункт управления (ПУ) и ряд контролируемых пунктов (КП). ПУ состоит из диспетчерского пульта 1, блока выбора адреса 2, блока формирования команды 3, блока управления 4, блока приема и проверки информации 5, шифратора 6, преобразователя частоты в код 7, первого линейного блока 8, второго линейного блока 9, коммутатора напряжения 10, блока сопряжения 11, вычислительной машины (ВМ) 12. КП состоит из линейного блока 13, блока приема и проверки информации 14, дешифратора 15, блока управления 16, преобразователя частоты в код 17, первого блока измерения 18, второго блока измерения 19, блока регулирования 20, третьего блока измерения 21, блока формирования телесигналов 22. Устройство работает следующим образом. Предусмотрены три режима работы устройства:а)автоматический; б)ручной с участием ВМ в качестве советчика;в)ручной, при отуствии ВМ. В автоматическом режиме не используется диспетчерский пульт 1, блок выбора адреса КП 2, блок формирования команд 3, при этом режиме осуществляются следующие операции: -телеизмерение интегральных значений параметров ТИИ; -телеизмерение текущих значений рабочего давления ТИИ; -телеизмерение текущих значений рабочего давления ТИТ 1; -телеизмерение текущих значений перепада давлений ТИТ 2; -телерегулирование; -телесигнализация аварийного состояния объекта; -снятие новой характеристики какойлибо скважины по желанию диспетчера для дальнейщего оптимального управления подачей газа к каждой скважине. Вся полученная информация в зависимости от требований обрабатывается и регистрируется. В ручном режиме, при котором используется ВМ в качестве советчика, всю информацию для объектов оператор получает от ВМ и затем принимает рещения. Помимо этого, при таком режиме в зависимости от желания диспетчера, полученная информация обрабатывается и регистрируется. Отсутствие ВМ в ручном режиме используется при исключении ВМ (ВМ не работоспособна) или в случае, когда необходимо осуществление какой-либо операции без разрещения ВМ. В ручном режиме осуществляются все операции (исключение составляет операция ТС). При использовании на объектах нефтедобычи система обеспечивает замер дебита нефтяных скважин в зависимости от способа замера и используемых переключающих установок по всем существующим программам. Система может осуществить приемопередачу результатов телеизмерения текущего значения давления в частном или кодовом виде. Благодаря тому, что контролируемый пункт разработан универсальным для различных объектов и с конструктивной точки зрения является полностью агрегатированным в зависимости от специфических факторов различных объектов и количества контролируемых параметров система имеет меньщую стоимость. Для исключения объектов из работы системы при автоматическом режиме, номер данного объекта выдается на ВМ, которая по соответствующей программе исключает этот объект. Для осуществления синхронизации между ПУ и КП, при каждом обращении к КП от ПУ с помощью блока щифратора посылается синхроимпульс, который после проверки в блоке приема и проверки информации 14 сбрасывает генератор и тактовый распределитель, находяцхихся в блоке управления 16. В отличие от информационного сигнала, длительность синхроимпульса выбрана в три раза больше длительности импульса элементарной посылки, целью обеспечения надежного приема информации на расстояние до 60 км по кабельной линии связи. Выбор режима работы системы осуществляется следующим образом: При автоматическом режиме диспетчерский пульт 1, блок выбора адреса КП 2 и блок формирования команд 3 не работают. Поэтому от диспетчерского пульта 1 на ВМ 12 никакие сигналы не поступают и ВМ 12 с соответствующими программами автоматически осуществляет требуемые операции. При осуществлении каких-либо операций ВМ 12 в двоичном виде выдает адрес КП (номер направления и условие номера КП в данном направлении), команду и номер объекта (при необходимости) адрес номера направления которого через блок сопряжения 11 с ВМ поступает на блок управления 4, в адрес КП данного направления, команда и номер объекта постунают в блок щифратора 6 для щифраиии. После получения сигнала о номере направления блок управления с помощью коммутатора направлений 10 подключает данный номер направления к выходу линейного блока 8, если же блока 8 не свободен или неработоспособен, то выбранное направление подключается к выходу линейного блока 9. После выбора направления блок управления разрешает работу блока щифратора 6, который через выбранный линейный блок 8 выдает адрес КП, команды, номер объекта в виде двоичного кода. В зависимости от нагрузки БМ может работать одновременно с двумя фидерами При этом от ВМ через блок 11 на блок 4 поступают номера направлений, а на блок 6 поступает адрес КП, команды и номер объекта для каждого направления. После получения номеров направлений блок 4 с помощью коммутатора 10 подключает данные номера направлений, к выходу соответствующих линейных блоков 8 и 9, от которых блок 6 выдает информацию на линии связи. При приеме информации от линии связи с двумя фидерами информации, поступающая от разных линий через соответствующие линейные блоки 8 и 9 поступает на блок приема и проверки информации 5, который после проверки достоверности информации (сигналы проверяются по длительности, амплитуде, нечетности, разрядности) передает ее через блок 11 на ВМ. Нужно отметить, что при работе с двумя направлениями передача или прием информации того или иного направления может быть сдвинута по времени на полный цикл тактового распределителя, находящегося в блоке управления 4. Сдвиг по времени зависит от работы ВМ и достоверности информации при приеме ПУ, а также в КП (в случае недостоверности приема информации ПУ или КП повторяется передача информации до 5 раз).
При ручном режиме, в котором ВМ используется как советчик, оператор на диспетчерском пульте 1 нажимает кнопку «Советчик, кнопку нужного номера направления и номера КП. После этих операций от диспетчерского пульта 1 в блок 11 поступает номер направления, в блоке адреса КП 2 формируется адрес КП, который затем поступает в блок 11, а в блок 4 поступает сигнал о ручной работе. При этом блок 4, через блок 11 обращается к ВМ для получения ответа о состоянии выбранного КП. После получения информации ВМ через блок 11 на диспетчерский пульт 1 выдает информацию о состоянии выбранного КП.
8случае, когда оператор считает целесообразным посылку каких-либо команд в диспетчерский пульт 1, он, нажимая соответствующую кнопку, вырабатывает нужную команду, которая после формирования в блоке
3 поступает в блок 11. После этих всех операций блок 4 с помощью коммутатора направлений 10 подключает на выход линейного блока 9 выбранное направление и разрешает посылку этим линейным узлом кода в линию связи. Одновременно с этой операцией ВМ через линейный блок 8 при автоматическом режиме последовательно работает с остальными направлениями.
В ручном режиме при отсутствии ВМ на диспетчерском пульте 1 набирается адрес нужного КП (номер направления, номер КП в данном направлении), который после формирования в соответствующих блоках 2, 3 поступает на блок11. С разрешения блока управления 4 зашифрованная информация через блок 6, линейный блок 8 и коммутатор направления 10 выдается в линию связи. Информация полученная от КП через коммутатор направления 10, линейный блок
9поступает на блок 5, где после проверки в необработанном виде отображается и регистрируется на диспетчерском пульте 1.
При аварийном состоянии объекта в блок формирования телесигналов ТС 22 находящихся в КП поступает сигнал аварийного состояния от соответствующих объектов.
При этом блок 22 с помощью блока 16 через линейный блок 13, посылает сигнал о наличии аварии в линию связи. С получением этого сигнала ПУ определяется в каком из направлений произошла авария. Для определения на каком из КП произощла авария, вычислительная машина 12 заканчивает работу, которую в это время она выполняла, после чего разрешает, через блок 11, блоку управления 4, через линейные блоки 8 и 9 и коммутатор направления, пересылку в соответствующих направлениях сигналов для получения номеров тех КП, на которых произошла авария. После получения информации номеров КП, где произошла авария, пункт управления с помощью ВМ,
через блок 11, линейные блоки 8 и 9 и коммутатор направления, поочередно посылает номер КП и команду на соответствующие КП. После приема и проверки информации в КП, блок 22 с помощью блока управления 16, через линейный блок 13, посылает информацию в линию связи. При приеме этой информации ПУ дает квитанцию о правильном приеме, которая снимает с данного КП сигнал о наличии аварии, а ПУ переходит работать со следующим КП. Если оператор хочет узнать устранена авария или нет, он в ручном режиме посылает соответствующую команду, при этом если авария в КП не устранены, то блок 22 заново выдает сигнал о наличии аварий и ПУ, как описано выше, в автоматическом режиме производит опрос информации.
Максимальный объем одного контролируемого пункта предложенной системы выполняет следующие функции:
-телеизмерение текущего значения рабочего давления (ТИТ1);
-телеизмерение текущего значения перепада давления ТИТ) - до 17;
-телерегулирование управляющего вентиля - до 16;
-телеизмерение интегральных значений параметра (ТИИ) - до 3;
-телеуправление двухпозиционными объектами (ТУ) - до 1;
-телесигнализация аварийного состояния (ТСА) - до 4;
-двусторонняя телефонная связь (ТЛФ).
Предложенная система телемеханики позволяет при небольших аппаратурных затратах осуществить централизованное оптимальное автоматическое управление технологическим процессом добычи нефти газлифтным способом, оперативный расчет забойных параметров, определяющих оптимальные режимы газлифтных скважин, увеличить добычу нефти на данном объекте не менее, чем на 10% и снизить ее себестоимость, снизить удельный расход рабочего агента (газа), упростить схемы обустройства скважин и облегчить обслуживание их.
Формула изобретения
Система телемеханики для управления рассредоточенными объектами, пункт управления которого содержит диспетчерский пульт, первый выход которого соединен с первыми входами блока выбора адреса и блока формирования команды, блок управления, первые выходы которого соединены со вторыми входами блока выбора адреса, блока формирования команды, а второй третий ки четвертый выходы - с первыми входами блоков приема и проверки информации, преобразователя частоты в код и шифратора, второй вход блока приема и проверки информации соединен с первым выходом первого линейного блока, первый вход которого соединен с первым выходом шифратора, вторые вход и выход первого линейного блока подключены к первому входу и к первому выходу коммутатора направления, второй вход преобразователя частоты в код соединен со вторым выходом коммутатора направления, второй вход и третий выход которого подключены к линии связи, и вычислительную машину, а каждый из контролируемых пунктов содержит линейный блок, первый вход и первый выход которого соединены с линией связи, второй выход подключен к первому входу блока приема и проверки информации, второй вход соединен с первым выходом блока управления, первый выход блока приема и проверки информации соединен с первым входом блока управления, дешифратор, к первому входу которого подключен второй выход блока управления и второй вход блока приема и проверки информации, а первый выход подключен к первым входам первого и второго блоков измерения и блока формирования телесигналов, второй, третий и четвертый входы блока управления соединены первыми выходами первого и второго блоков измерения и блока формирования телесигналов, второй вход и первый выход первого и второго блоков измерения подключены к соответствующим выходам устройства, второй вход блока формирования телесигналов соединен с. первым входом устройства, отличающаяся тем, что, с целью расширения функциональных возможностей, в пункт управления введены второй линейный блок и блок сопряжения, первый, второй, третий и четвертый выходы которого соединены соответственно с первым входом блока управления, со вторым входом шифратора, со вторым входом диспетчерского пульта и с первым входом вычислительной машины, с первого по седьмой входы блока сопряжения соответственно подключены к пятому выходу блока управления, к первому выходу блока приема и проверки информации, к выходу блока выбора адреса, к выходу блока формирования команды, ко второму выходу диспетчерского пульта, к выходу преобразователя частоты в код и к выходу вычислительной машины, шестой выход блока управления подключен к третьему входу коммутатора направлений, а второй вход - к третьему выходу диспетчерского пульта, третий вход которого соединен со вторым выходом блока приема и проверки информации, первый выход и вход второго линейного блока соединены с соответствующими четвертыми входом и выходом коммутатора направления, а вторые вход и выход второго линейного блока соединены с третьим входом блока приема и проверки информации и со вторым выходом шифратора, на каждом контролируемом пункте введены третий блок jH3Mepeния, блок регулирования и преобразователь частоты в код, второй выход блока приема и проверки информации подключен ко второму входу дешифратора, пятый и шестой входы блока управления подключены соответственно к первому выходу преобразователя частоты в код и первому-выходу третьего блока измерения, первый выход дешифратора соединен с первыми входами третьего блока измерения и блока регулирования, седьмой и восьмой входы блока управления соединены соответственно со вторым выходом дешифратора, с первым выходом блока регулирования, а третий выход блока управления - с первым входом преобразователя частоты в код, вторые входы и выходы третьего блока измерения и блока регулирования соединены с выходами устройства, первые выходы первого и второго блоков измерения подключены соответственно ко второму и третьему входам преобразователя частоты в код, управляющий выход блока управления подключен к соответствуюшим входам блоков измерения, блока регулирования и блока формирования телесигналов. Источники информации, принятые во внимание при экспертизе 1.Ж.«Автоматизация и телемеханизация нефтяной промышленности, М., 1973, № 3. 2.Ж.«Автоматизация и телемеханизация нефтяной промышленности, М., № 3, с. 29 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телемеханики для рассредоточенных объектов | 1975 |
|
SU553647A1 |
| Система телемеханики для рассредоточенных объектов | 1976 |
|
SU563685A1 |
| Система для телеуправления и телесигнализации | 1978 |
|
SU781871A1 |
| Устройство для приема и регистрации телесигналов | 1978 |
|
SU698031A1 |
| Устройство для передачи и приема информации о состоянии объектов | 1978 |
|
SU765856A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Устройство для приема телесигналов | 1983 |
|
SU1137497A1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Комплексное телемеханическое устройство | 1980 |
|
SU960892A1 |