1
Изобретение относится к технике контроля и регулирования и может быть использовано для контроля скорости вращения гидроагрегатов.
В технике контроля и регулирования все шире используются дискретные датчики скорости, обеспечивающие высокую точность измерения скорости 1.
Наиболее близким цо технической сущности и решаемым задачам является способ измерения параметров вращения вала, в котором скорость вращения измеряется с помощью автогенераторного датчика скорости, а временной интервал между частотномодулированными импульсами или частота их следования есть мера скорости 2.
Однако для обеспечения высокой чувствительности и быстродействия измерительной системы в режиме медленного торможения вала требуется или выполнение датчикз с большим количеством модулирующих элементов, или выполнение селектора в виде гребенчатого фильтра, что, повышая количество генерируемых в устройство импульсов, в обоих случаях усложняет конструкцию устройства. Кроме того, нарушается работа измерительного устройства.
Целью изобретения является увеличение числа импульсов. Это достигается тем, что
преобразователь в моменты генерирования импульсов принудительно перестраивают.
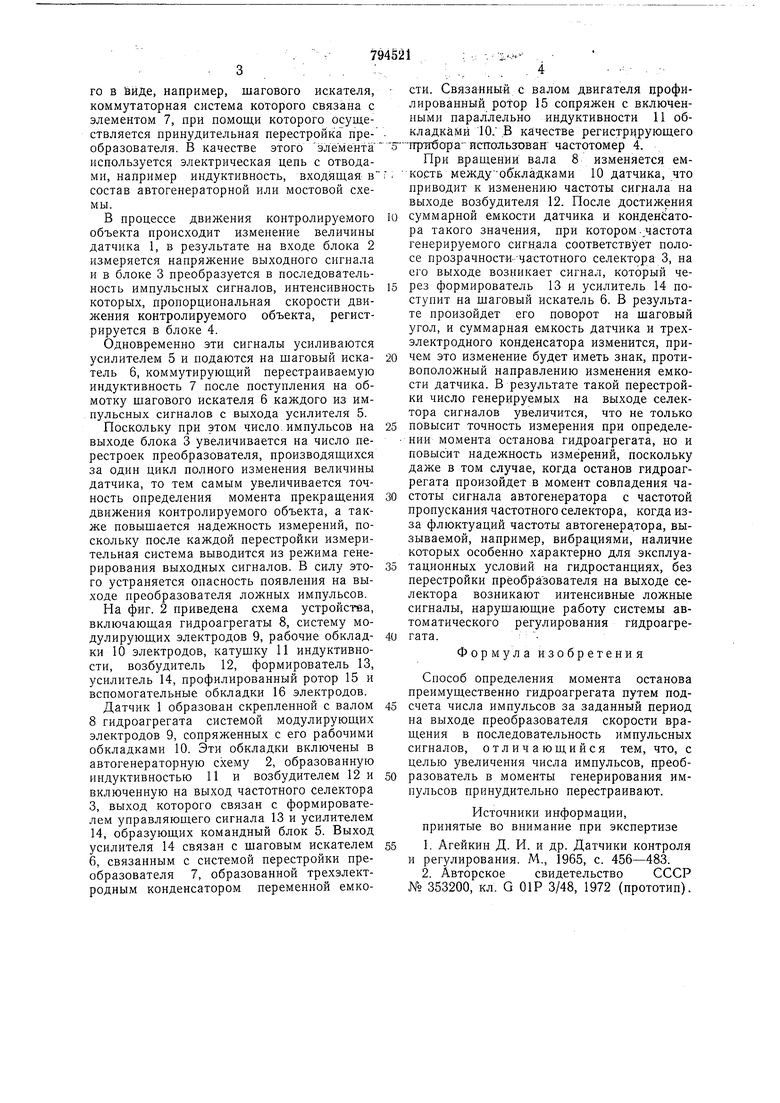
На фиг. 1 приведена блок-схема одного из возможных вариантов устройства для осуществления данного способа; на фиг. 2- схема устройства применительно к использованию в качестве преобразователя автогенератора с емкостным датчиком скорости движения, нагруженного на частотный селектор, выход которого связан с системой перестройки автогенератора.
Датчик 1, например индуктивный, преобразующий скорость движения в изменение значения своей величины, подключен к блоку 2, в качестве которого может быть использована, например, автогенераторная или мостовая система, преобразующему изменение величины датчика 1 в электрический сигнал, выход которого включен на вход блока 3, выполненного, например, в виде частотного селектора, преобразующего электрический сигнал во время-импульсный код и подключенного па вход регистрируюш,его блока 4, в качестве которого удобно использовать частотомер. Одновременно выход блока 3 связан с блоком 5, в качестве которого может быть применен импульсный усилитель, вырабатывающий командный сигнал на перестройку преобразователя при помощи блока 6, выполненного в ййде, например, шагового искателя, коммутаторная система которого связана с элементом 7, при помощи которого осуществляется принудительная перестройка преобразователя. В качестве этого элемента используется электрическая цепь с отводами, например индуктивность, входящая в состав автогенераторной или мостовой схемы.
В процессе движения контролируемого объекта происходит изменение величины датчика 1, в результате на входе блока 2 измеряется напряжение выходного сигнала и в блоке 3 преобразуется в последовательность импульсных сигналов, интенсивность которых, пропорциональная скорости движения контролируемого объекта, регистрируется в блоке 4.
Одновременно эти сигналы усиливаются усилителем 5 и подаются на щаговый искатель 6, коммутирующий перестраиваемую индуктивность 7 после поступления на обмотку щагового искателя 6 каждого из импульсных сигналов с выхода усилителя 5.
Поскольку при этом число, импульсов на выходе блока 3 увеличивается на число перестроек преобразователя, производящихся за один цикл полного изменения величины датчика, то тем самым увеличивается точность определения момента прекращения движения контролируемого объекта, а также повышается надежность измерений, поскольку после каждой перестройки измерительная система выводится из режима генерирования выходных сигналов. В силу этого устраняется опасность появления на выходе преобразователя ложных импульсов.
На фиг. 2 приведена схема устройства, включающая гидроагрегаты 8, систему модулирующих электродов 9, рабочие обкладки 10 электродов, катушку И индуктивности, возбудитель 12, формирователь 13, усилитель 14, профилированный ротор 15 и вспомогательные обкладки 16 электродов.
Датчик 1 образован скрепленной с валом 8 гидроагрегата системой модулирующих электродов 9, сопряженных с его рабочими обкладками 10. Эти обкладки включены в автогенераторную схему 2, образованную индуктивностью 11 и возбудителем 12 и включенную на выход частотного селектора 3, выход которого связан с формирователем управляющего сигнала 13 и усилителем 14, образующих командный блок 5. Выход усилителя 14 связан с шаговым искателем 6, связанным с системой перестройки преобразователя 7, образованной трехэлектродным конденсатором переменной емко сти. Связанный с валом двигателя профилированный ротор 15 сопряжен с включенными параллельно индуктивности 11 обкладками 10; В качестве регистрирующего 5 гтрттбораиспальзован частотомер 4.
При вращении вала 8 изменяется ем; КОСТЬ междуобкладками 10 датчика, что приводит к изменению частоты сигнала на выходе возбудителя 12. После достижения
10 суммарной емкости датчика и конденёатора такого значения, при котором .частота генерируемого сигнала соответствует полосе прозрачностИ -частотного селектора 3, на его выходе возникает сигнал, который через формирователь 13 и усилитель 14 поступит на щаговый искатель 6. В результате произойдет его поворот на шаговый угол, и суммарная емкость датчика и трехэлектродного конденсатора изменится, причем это изменение будет иметь знак, противоположный направлению изменения емкости датчика. В результате такой перестройки число генерируемых на выходе селектора сигналов увеличится, что не только
5 повысит точность измерения при определе НИИ момента останова гидроагрегата, но и повысит надежность измерений, поскольку даже в том случае, когда останов гидроагрегата произойдет в момент совпадения частоты сигнала автогенератора с частотой пропускания частотного селектора, когда изза флюктуации частоты автогенератора, вызываемой, например, вибрациями, наличие которых особенно характерно для эксплуатационных условий на гидростанциях, без перестройки преобразователя на выходе селектора возникают интенсивные ложные сигналы, нарушающие работу системы автоматического регулирования гидроагре0 гата.:
Формула изобретения
Способ определения момента останова преимущественно гидроагрегата путем подсчета числа импульсов за заданный период на выходе преобразователя скорости вращения в последовательность импульсных сигналов, отличающийся тем, что, с целью увеличения числа импульсов, преобразователь в моменты генерирования импульсов принудительно перестраивают.
Источники информации, принятые во внимание при экспертизе
5 1. Агейкин Д. И. и др. Датчики контроля и регулирования. М., 1965, с. 456-483.
2. Авторское свидетельство СССР № 353200, кл. G 01Р 3/48, 1972 (прототип).
фиг 1
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вращающего момента | 1977 |
|
SU647561A1 |
| Емкостный датчик скорости | 1976 |
|
SU684446A1 |
| Способ контроля остановки ротора гидроагрегата | 1980 |
|
SU987158A1 |
| Способ измерения параметров вращения вала | 1976 |
|
SU685982A1 |
| Устройство для измерения частоты вращения вала | 1983 |
|
SU1213416A1 |
| Преобразователь частоты вращения вала | 1984 |
|
SU1229696A1 |
| УСТРОЙСТВО для УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОРНОГО МАССИВА | 1972 |
|
SU330408A1 |
| Устройство для управления полем электромагнита | 1975 |
|
SU553606A1 |
| Устройство для сортировки кускового минерального сырья | 1972 |
|
SU452370A1 |
| ЭЛЕКТРОННЫЙ ВЛАГОМЕР | 1993 |
|
RU2046332C1 |

