(54) СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ВАЛА

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения моментаОСТАНОВА пРЕиМущЕСТВЕННОгидРОАгРЕгАТА | 1976 |
|
SU794521A1 |
| Емкостный датчик скорости | 1976 |
|
SU684446A1 |
| Способ преобразования частоты вращения и устройство для его осуществления | 1984 |
|
SU1215027A1 |
| Способ измерения скорости вращения вала | 1976 |
|
SU667895A1 |
| Способ преобразования сигнала времяимпульсного измерителя частоты вращения и устройство для его осуществления | 1982 |
|
SU1104424A1 |
| Устройство для измерения вращающего момента | 1977 |
|
SU647561A1 |
| Устройство автоматической подстрой-Ки чАСТОТы чАСТОТНО-МОдулиРОВАННОгОгЕНЕРАТОРА | 1978 |
|
SU813673A1 |
| Устройство для измерения частоты вращения вала | 1983 |
|
SU1213416A1 |
| Датчик частоты вращения вала | 1981 |
|
SU1296940A1 |
| Способ контроля остановки ротора гидроагрегата | 1980 |
|
SU987158A1 |
I
Изобретение относится к области измерительной техники и может быть использовано для измерения параметров вращения вала.
Известно устройство для определения скорости и направления вращения вала, содержащее автогенераторный датчик, блок преобразования частоты в напряжение, блок определения направления врап1ения и два потенциальных компаратора, включенных между преобразователем частоты в напряжение и блоком определения направления вращения 1).
Известен также способ измерения параметров вращения вала путем преобразования его угловой скорости в последовательность электрических сигналов при помощи автогенераторных преобразователей, нагруженных на частотный селектор, с последующим измерением расстояний между этими сигналами 2.
Данный способ является наиболее близким по технической сущности и достигаемому результату к изобретению.
Недостатком известных устройств и способов является низкая надежность при измерении.
Целью изобретения является noBunjeHHe надежности.
Поставленная цель достигаепя тем. что по предлагаемому способу измерения параметров вращения вала путем преобразования его угловой скорости в последовательность электрических сигналов при помощи автогенераторных преобразователей, нагруженных на частотный селектор, с последующим измерением расстояний между этими сигналами, минимальную частоту автогенераторного преобразователя выбирают ниже 5 минимальной частоты полосы прозрачности частотного селектора, а максима.льную выще максимальной, после чего измеряют промежуток времени между сигна.тами, соответствующими заданному направлению изменения частоты автогенераторного пре0образователя при достижении его частоты полосы прозрачности селектора.
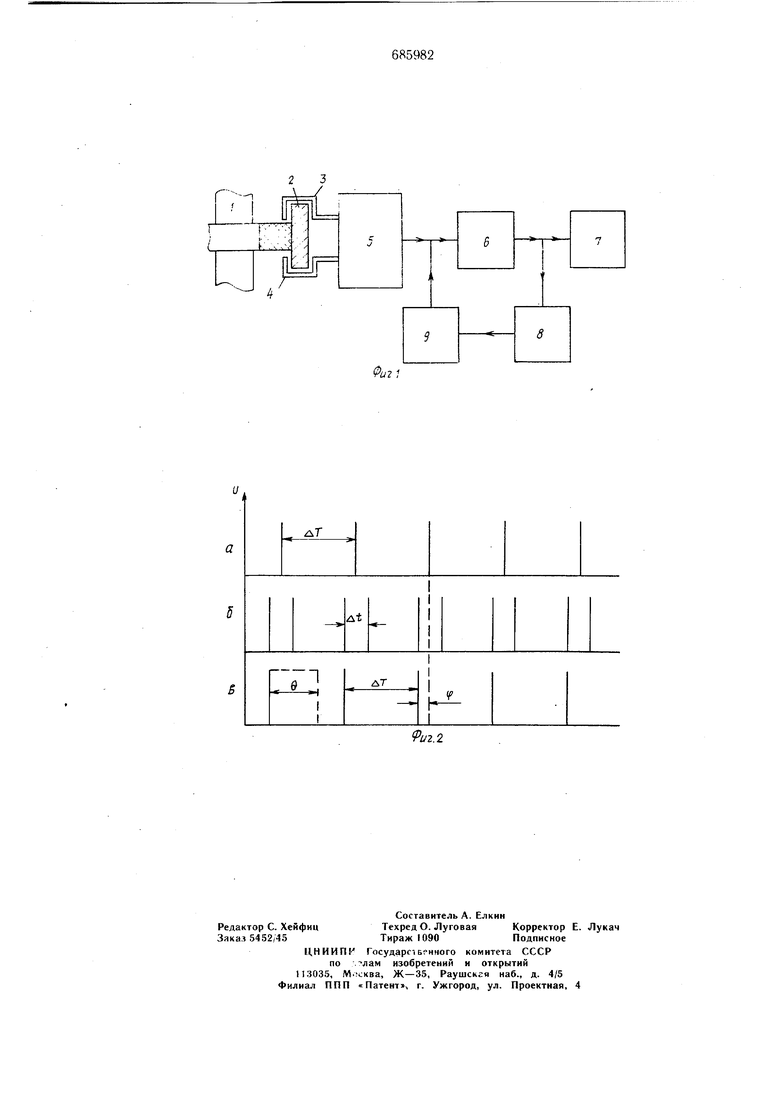
На фиг. 1 изображена блок-схема устройства, реализующего о1П1сываемый способ; на фиг. 2 - потенциальные время-импульсные диаграммы, поясняющие работу устройства; где U - напряжение на выходе частотного селектора.
Устройство со.аержит сопряженный с валом 1 трехэлектродный датчик, состоящий из системы модулирующих электродов 2 и обкладок 3 и 4, входящих в контур автогенераторного преобразователя 5, соединенного через частотный селектор 6 с измерителем периода 7. Между выходом частотного селектора 6 и его входом включены последовательно соединенные одновибратор 8 и ключ 9.
На диаграмме 2а изображено распределение временных импульсов при настойке частотного селектора 6 на одну из экстремальных частот автогенераторного преобразователя 5 в случае равномерного углового распределения модулирующих электродов, выполненных одинаковыми и вращающихся с постоянной скоростью.
На диаграмме 26 изображено распределение временных импульсов для того же случая, что и в диаграмме 2а, но при расстройке экстремальной частоты автогенераторного преобразователя, приводящей к появлению дополнительных импульсов и иному их. распределению во времени, или их полному пропаданию, что в любом случае приводит к недопустимо больщим погрещностям в измерениях.
На диаграмме 2в изображено распределение измерительных импульсов для случая, когда автогенераторный преобразователь принудительно настроен так, что частотный диапазон селектора 6 находится внутри диапазона частот, генерируемых в процессе измерений автогенераторным преобразователем 5, причем каждый последующий импульс, четный или нечетный, подавляется (на диаграмме показан случай подавления четного импульса).
Поскольку при расстройке автогенератора положение раздвоенного импульса сохраняется одинаковым относительно одинарного импульса, получаемого при настройке полосы селектора на экстремальную частоту автогенераторного преобразователя, то при любом интервале At интервал Л 7, характеризующий скорость вращения вала, будет зависеть только от последней. Подавление смежных импульсов осуществляется с помощью ключа 9, управляемого одновибратором 8. В момент появления на выходе селектора 6 импульса одновибратор 8 генерирует импульс длительностью 6, который открывает ключ 9. Длительность этого импульса регулируется так, чтобы выполнялось условие Д t 0 Д Г. Некоторый сдвиг измерительных импульсов на угол ср, возникающий при реализации данного способа, в большинстве практических случаев роли не играет.
Изобретение позволяет повысить надежность измерений параметров вращения вала.
Формула изобретения
Способ измерения пара.метров вращения вала путем преобразования его угловой скорости в последовательность электрических сигналов при помощи автогенераторных преобразователей, нагруженных на частотный селектор, с последующим измерением расстояний между этими сигналами, отличающийся тем, что, с целью повыщения надежности, минимальную частоту автогенераторного преобразователя выбирают ниже минимальной частоты полосы прозрачности частотного селектора, а максимальную - выше максимальной, после чего измеряют промежуток времени между сигналами, соответствующими заданному направлению измеS нения частоты автогенераторного преобразователя при достижении его частоты полосы прозрачности селектора.
Источники информации, принятые во внимание При экспертизе
№ 353200, кл. G 01 Р 3/48, 1972 (прототип).
2 3
r---,
r jMr
П
e
