Изобретение относится к автомати ческим системам, предназначенным для обработки механических перемеще HHJJ, заданных в цифровой форме, а также для систем поиска информации на ленточном носителе по заданной координате места этой информации. Известно устройство управления позиционным дискретным электроприво дом, содержащее счетчик импульсов перемещения, компаратор, генератор импульсов регулируемой частоты, счетчик пути торможеция и коммутато Ка)хдый импульс генератора обуславливает изменение позиционной координаты электропривода на единичный шаг. Компаратор сравнивает заданное в цифровой форме перемещение с числом счетчика импульсов перемещения и с помощью коммутатора производит переключение генератора с режима увеличения частоты на режим ее умен шения . В счетчик импульсов перемеще ния поступают все импульсы генерато ра, а на счетчик пути торможения и на управление приводом - через один Равенство сравниваемых KOMnapiaTopOM чисел поступает при отработке половины заданного перемещения. Уменьшение частоты генератора после пере ключевин коммутатора происходит до обнуления с етчика пути -торможения i. Однако это устройство пригодно для осуществления лишь сравнительно небольших перемещений с треугольным законом изменения скорости при позициониронании. Наиболее близким к изобретению техническим решением является устройство для позиционного программного управления, содержащее генератор импульсов, первый выход которого соединен с первым входом задатчика импульсов, второй вход которого подключен к выходу компаратора и к первому входу коммутатора, а выход к второму входу коммутатора, первый и второй выходы которого соединены с соответствующими входами счетчика импульсов 2 . Недостатком устройства является большое время позиционирования из-за . линейного закона увеличения скорости при разгоне, что ограничивает его быстродействие. Цель изобретения - повышение быстродействия устройства. Поставленная цель-достигается тем, 4TQ в устройство дополнительно введены модулятор частоты, делитель
частоты и последовательно соединзнные первый дешифратор, первый элемент И, формирователь пачек импульсов, второй дешифратор, второй элемент И, первый блок разделения импульсов, масштабный делитель и второй блок разделения импульсов, выход которого подключен к первому входу компаратора, а второй выход к выходу устройства и выходу модулятора частоты, первый вход которого соединен с выходом счетчика импульсов, с входом первого дешифратора и с вторым входом формирователя пачек импульсов, а второй вход - с первым выходом генератора импульсов и через делит«ель частоты с третьим входом формирователя пачек импульсов, второй выход генератора импульсов подключен к второму входу второго элемента И, выход задатчика импульсов - к второму входу первого блока разделения импульсов, а первый выхо коммутатора - к второму входу первого элемента И.
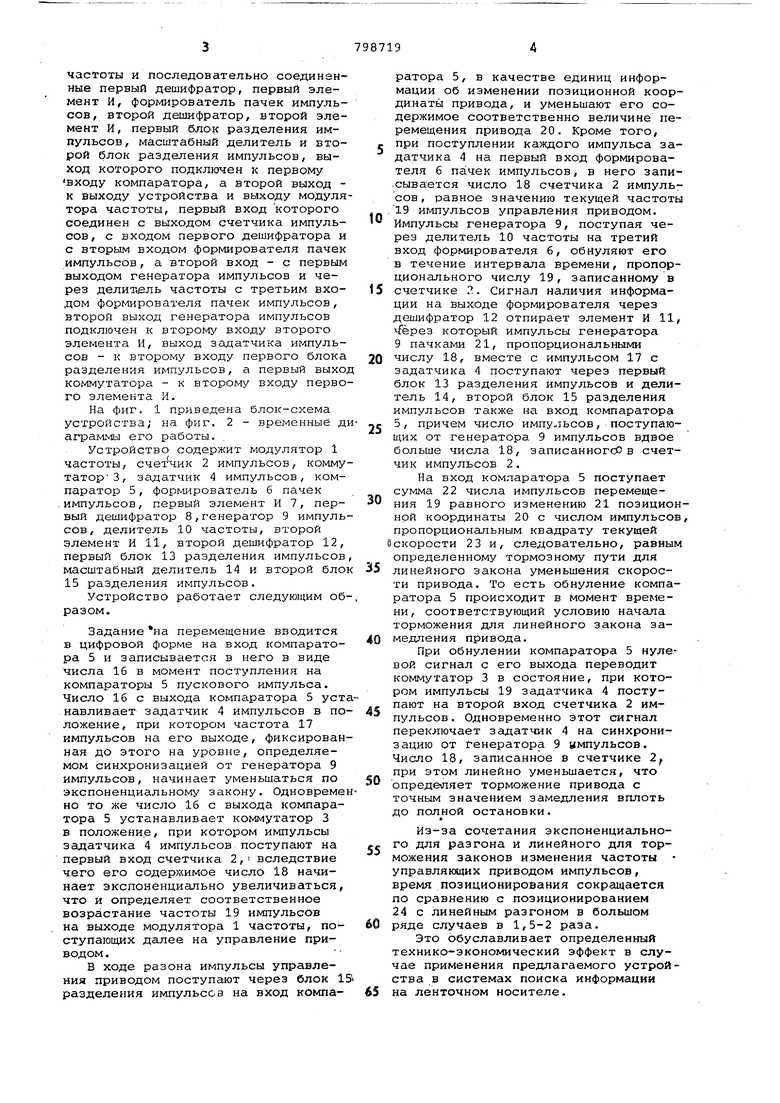
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - вре1менныё дarpais-uvttj его работы.
Устройство содержит модулятор 1 частоты, 2 импульсов, коммутатор-3, задатчик 4 импульсов, компаратор 5, формирователь 6 пачек ,импульсов, первый элемент И 7, первый дешифратор 8,генератор 9 импульсов, делитель 10 частоты, второй элемент И 11, второй дешифратор 12, первый блок 13 разделения импульсов масштабный делитель 14 и второй бло 15 разделения импульсов.
Устройство работает следующим об разом.
Задание на перемещение вводится в цифровой форме на вход компаратора 5 и записывается в него в виде числа 16 в момент поступления на компараторы 5 пускового импульса, Число 16 с выхода компаратора 5 устнавливает задатчик 4 импульсов в положение, при котором частота 17 импульсов на его выходе, фиксированная до этого на уровне, определяемом синхронизацией от генератора 9 импульсов, начинает уменьшаться по экспоненциальному закону. Одновремено то же число 16 с выхода компаратора 5 устанавливает коммутатор 3 в положение, при котором импульсы задатчика 4 импульсов поступают на первый вход счетчика 2,i вследствие чего его содержимое число 18 начинает экспоненциально увеличиваться, что и определяет соответственное возрастание частоты 19 импульсов на выходе модулятора 1 частоты, поступающих далее на управление приводом ,
В ходе разона импульсы управления приводом поступают через блок 1 разделения импульсов на вход компаратора 5, в качестве единиц информации об изменении позиционной координаты привода, и уменьшают его содержимое соответственно величине перемещения привода 20. Кроме того, при поступлении каждого импульса задатчика 4 на первый вход формирователя б пачек импульсов, в него записывается число 18 счетчика 2 импульсов , равное значению текущей частот
.19 импульсов управления приводом. Импульсы генератора 9, поступая через делитель 10 частоты на третий вход формирователя 6, обнуляют его в течение интервала времени, пропорционального числу 19, записанному в счетчике 2. Сигнал наличия информации на выходе формирователя через дешифратор 12 отпирает элемент И 11 vfepe3 который импульсы генератора 9 пачками 21, пропорциональными числу 18, вместе с импульсом 17 с задатчика 4 поступают через первый блок 13 разделения импульсов и делитель 14, второй блок 15 разделения импульсов также на вход компаратора 5, причем число импульсов, поступающих от генератора 9 импульсов вдвое больше числа 18, записанногсС в счетчик импульсов 2.
На вход компаратора 5 поступает сумма 22 числа импульсов перемещения 19 равного изменению 21 позиционой координаты 20 с числом импульсо пропорциональным квадрату текущей
вскорости 23 и, следовательно, равны определенному тормозному пути для линейного закона уменьшения скорости привода. То есть обнуление компаратора 5 происходит в момент времени, соответствующий условию начала торможения для линейного закона замедления привода.
При обнулении компаратора 5 нулевой сигнал с его выхода переводит коммутатор 3 в состояние, при котором импульсы 19 задатчика 4 поступают на второй вход счетчика 2 импульсов. Одновременно этот сигнал переключает Зсщатчик 4 на синхронизацию от генератора 9 импульсов. Число 18, записанное в счетчике 2 при этом линейно уменьшается, что определяет торможение привода с точным значением замедления вплоть до полной остановки.
Из-за сочетания экспоненциального для разгона и линейного для торможения законов изменения частоты управляющих приводом импульсов, время позиционирования сокращается по сравнению с позиционированием 24 с линейным разгоном в большом ряде случаев в 1,5-2 раза.
Это обуславливает определенный технико-экономический эффект в случае применения предлагаемого устройства в системах поиска информации на ленточном носителе,
Формула изобретения
Устройство для управления позиционным дискретным приводом, содержащее генератор импульсов, первый выход которого соединен с первым входом задатчика импульсов, второй вход Iкоторого подключен к выходу компаратора и первому входу коммутатора, а выход - к второму входу коммутатора, первый и второй выходы которого соединены с соответствующими входами счетчика импульсов, отличающееся , что, с целью повьааения быстродействия устройства, в не.го введены модулятор частоты, делитель частоты и последовательно соеди ненные первый дешифратор, первый элемент И, формирователь пачек импульсов, второй дешифратор, второй элемент И, первый блок разделения импульсов, масштабный делитель и вто рой блок разделения импульсов, выход которого подключен к первому входу
компаратора, а второй вход - к выходу устройства и выходу модулятора частоты, первый вход которого соединен с выходом счетчика импульсов, с входом первого дешифратора и вторым входом формирователя пачек импульсов, а второй вход - с первым выходом генератора импульсов и через делитель частоты с третьим входом формирователя пачек импульсов , второй выход генератора импульсов подключен к второму входу второго элемента И, выход задатчика импульсов - к втором входу первого блока разделения импульсов, а первый выход коммутатора - к второму входу первого элемента И.
Источники информации, принятые во внимание при экспертизе
1. Патент США 3582751, кл. 318-696, опублик. 1971.
2. Авторское свидетельство СССР № 550622, кл, G 05 В 19/18, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулированиячАСТОТы | 1978 |
|
SU807223A1 |
| Устройство для передачи и приема информации с вращающихся объектов | 1984 |
|
SU1257687A1 |
| Задатчик ритма | 1986 |
|
SU1339485A1 |
| Генератор псевдослучайной М-последовательности | 1985 |
|
SU1264317A2 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Многоканальный стимулятор | 1983 |
|
SU1181671A1 |
| Устройство для формирования пачекиМпульСОВ | 1979 |
|
SU828384A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ И ОСТАНОВОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2510125C1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
Задание .К приводу
...-. , |; .vi.,), ;..; -
798719 1
IS 19
LJLli
