(54) СЕЙСМОПРИЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИКII2; | 1970 |
|
SU283611A1 |
| СЕЙСМОПРИЕМНИК | 1972 |
|
SU326530A1 |
| СЕЙСМОПРИЕМНИК | 1971 |
|
SU314166A1 |
| СЕЙСМОПРИЕМНИК | 1971 |
|
SU313190A1 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК УСКОРЕНИЙ С НАИМЕНЬШИМ КОЭФФИЦИЕНТОМ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ | 1999 |
|
RU2155358C1 |
| СЕЙСМОПРИЕМНИК ПРОКОПОВА | 1973 |
|
SU396649A1 |
| Сейсмоприемник | 1986 |
|
SU1337851A1 |
t
Изобретение относится к вибрационной технике и предназначено для измерения механических колебаний машин и сооружений.
Известен сейсмоприемник по основному авт.св. 314166, содержащий корпус, чувствительный элемент, выполненный в виде двух постоянных магнитов, скрепленных одноименными полюсами, общим полюсным наконечником, опорный, жестко скрепленный с корпусом постоянный магнит, диамагнитную направляющую втулку и жестко скрепленную с корпусом катушку индуктивности 11J .
Недостатком известного сейсмоприемника является высокая частота свободных колебаний инерционной массы и, как следствие этого, ограниченный частотный диапазон.
Цель изобретения - расширение частотного диапазона.
Указанная цель достигается тем, что отношение диаметров опорного, жестко скрепленного с корпусом постоянного магнита к диаметрам постоянных магнитов чувствительного элемента выбрано з пределах 1,5-2.
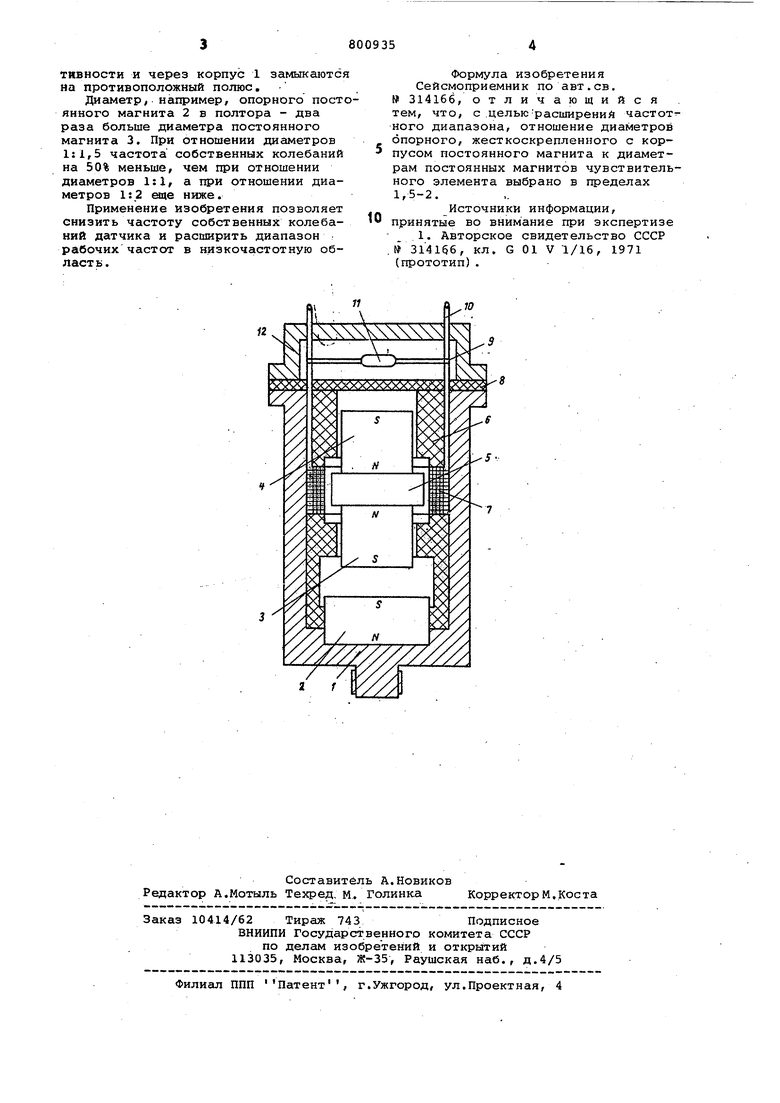
На чертеже яг ображен сейсмоприемник, общий вид.
Сейсмоприемник содержит корпус 1, закрепленный в нем опорный постоянный магнит 2, чувствительный элемент, выполненный в виде д|;ух постоянных магнитов 3 и 4, скрепленных вместе одноименными полюсаг ли о&цим полюсным наконечником 5, дигинагннтную направляющую втулку 6 , жестко скрепленную с корпусом катушку 7 индук0тивности, электроизоляционную крышку 8, клеммы Э, внешние проводники 10, демпфирующее согфотивление 11, крышку 12.
. Сейсмощзиемник работает следующим
5 образом.
В состоянии покоя магниты 3 и 4 находятся во взвешенном состоянии и занимают положение, при котором полюсный наконечник 5 располагается
0 Строго симметрично относительно середины катушки 7. В этом положении вес инерционной системы уравновешивается силами.взаимодействия встречных силовых магнитных линий между
5 одноименными полюсами магниты 3 и опорного магнита 2, запрессованного в корпус 1. Магнитные силовые линии одноименных полюсов ма1 нитов 3 и 4, сконцентрированные полюсным наконеч0 НИКОМ 5, пересекают катушку 7 индуктивности и через корпус 1 замыкаютёя на противоположный полюс,
д: аметр, например, опорного постоянного магнита 2 в полтора - два раза больше диаметра постоянного магнита 3. При отношении диаметров 1:1,5 частота собственных колебаний на 50% меньше, чем при отношении диаметров 1:1, а при отношении диаметров 1:2 еще ниже.
Применение изобретения позволяет снизить частоту собственных колебаний датчика и расширить диапазон : рабочихчастот в низкочастотную область.
«
л
Формула изобретения Сейсмоприемник по авт.ев. №314166, отличающийся тем, что, с.цельюрасширений частот ного диапазона, отношение диаметров опорного, жесткоскрепленного с корпусом постоянного магнита к диаметрам постоянных магнитов чувствительного элемента выбрано в пределах 1,5-2.
Источники информации, принятые во внимание при экспертизе
10
х
