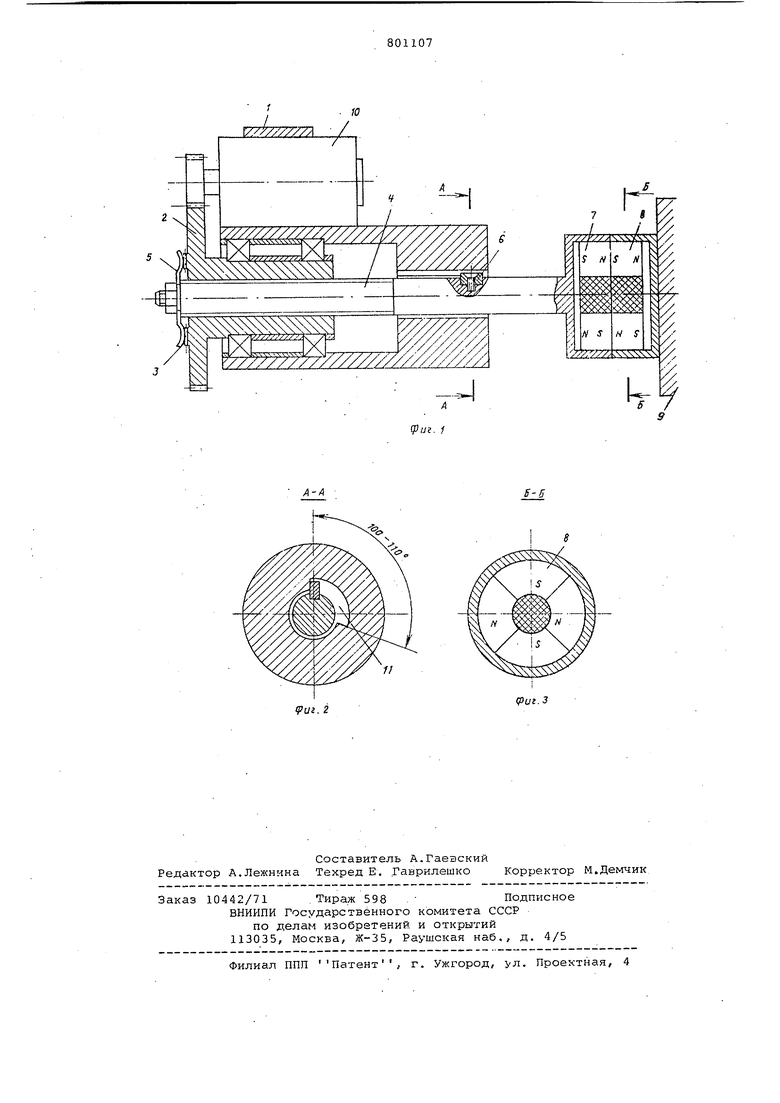
Изобретение ртносится к машиностроению и может быть использовано для временного фиксирования подвижных элементов механизма. Известно устройство, содержащее корпус с размещенным в нем подвижны блоком постоянных магнитов, неподвиж ный блок постоянных магнитов и механизм управления подвижным блоком, включающий стержень, жестко соединен ный одним концом с подвижным блоком Недостатком Ьтого устройства явля ется малая надежность, например при арретировании деталей, обусловленная конструкцией механизма управления подвижным блоком, которая не исключа ет возможности возврата подвижного блока в исходное положение.. Цель изобретения - повышение надежности арретирования деталей. Поставленная цель достигается тем что корпус выполнен с секторньии пазо а стерхсень - с резьбой на свободном конце, в корпусе установлена с возможностью вращения взаимодействующая с резьбой стержня гайкг с зубчатым венцом на ее -торце, а на стержне закреплены подпружиненная защелка, взаимодействующая с венцом гайки, и шпонка, расположенная в пазу корпус при этом на корпусе закреплен электродвигатель, кинематически соединенный с гайкой, а угол секторного паза больше угла между полюсами магнитных блоков, например на 1С-20. Ка фиг. 1 изображен магнитный арретир, общий вид в разрезе; на фиг. 2 - разрез А-А ка фиг. 1; на фиг. 3разрез Б-Б на фиг. 1, Магнитный арретир содержг корпус 1, в котором размещены гайка 2 с зубчатым венцом 3 на торце, стержень 4 с резьбой и подпружиненной защелкой 5,шпонку 6,подвижный блок 7 постоянных магнитов, неподвижный блок 8 постоянных магнитов, закрепленный на арретируемом элементе 9, электродвигатель 10 и шпоночный паз 11. Устройство работает следующим образом. В исходном состоянии оно заарретировано. Блоки постоянных магнитов 7 и 8 сближены, их разноименные полюсы распо дОжены строго друг против друга и составляют единую замкнутую магнитную систему (фиг. 1). Шпонка 6 упирается в торец паза 11 (фиг. 2). Концы защелки 5 располагаются во впадинах зубчатого зенца 3. Поскольку мощность, требуемая на смещение подвижного блока постоянных магнитов относительно неподвижного поперек силовых линий, значительно ниже мощности, требующейся на разрыв их вдоль силовых линий, то при включении электродвигателя сначала происходит их разворот, т.е. гайка 2 вместе со стержнем 4, преодолевая сопротивление магнитов, поворачивается в пределах угла сектора шпоноч 1ого паза 11 за счет трения защелки 5 по зубчатому венцу 3. Совместное вращение стержня с резьбой и гайки 2 продолжается до упора шпонки
6в торец паза 11. В этот момент одноименные полюсы магнитов оказываются лежащими друг против друга и магнитные системы подвижного и неподвижного блоков постоянных магнитов начинают отталкиваться друг от друга, содейс :вуя разарретированию. В.следствие того, что угол шпоночного паза 11 больше на 10-20 угла между полюсами магнитов, кроме осевых сил отталкивания возникает еще и момент, прижимающий шпонку 6 к торцу паза 11, который препятствует возвращению блока 7 в исходное состояние. того как шпонка б упрется в торец паза 11, вращение стержня 4 прекращается. Защелка, сделав несколько щелчков, выходит из зацепления с зубчатым венцом 3. Далее автоматически производится осевой отвод подвижного блока
7постоянных магнитов от неподвижного
8до полного разарретирования. Арретирование производится реверсированием электродвигателя. Гайка 2 вмес те со стержнем 4, не встречая сопротивления, поворачивается в пределах угла сектора шпоночного паза 11 за счет трения в резьбе. Разноименные полюсы магнитных систем подвижного 7 и неподвижного 8 блоков постоянных
магнитов к моменту упора шпонки 6 в торец шпоночного паза 11 становятся друг против друга и при дальнейшем осевом движении стержня 4 оказываются притянутыми друг к другу с максимальной силой, образуя при этом единую замкнутую магнитную систему. В конце хода стержня 4 защелка 5, сделав несколько щелчков, зафиксируется в зубчатом венце 3.
Формула изобретения
Магнитный арретир, содержащий корпус с размещенным в нем подвижным блоком постоянных магнитов, неподвижный блок постоянных магнитов и механизм управления подвижным блоком, включающий стержень, жестко соединенный одним концом с подвижным блоком, отличающийся т ем, ч то, с целью повышения надежности работы, корпус выполнен с секторным пазом, а стержень - с резьбой на свободном конце, в корпусе установлена с возможностью вращения и взаимодействующая с резьбой стержня гайка с зубчатым венцом на ее торце, а на стержне закреплены подпружиненная защелка,. взаимодействующая с венцом гайки, и шпонка, расположенная в пазу корпуса при этом на корпусе закреплен электродвигатель, кинематически соединенный с гайкой, а угол секторного паза больше угла между полюсами магнитных блоков, например на 10 - 20°.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 220459, кл. В 66 С 1/04, 1968 (прототип).
/
У77777Г/7Л /
| название | год | авторы | номер документа |
|---|---|---|---|
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ ПРИВОДА РУЛЯ РАКЕТЫ | 2010 |
|
RU2427798C1 |
| АРРЕТИР РУЛЕВОГО ЭЛЕКТРОПРИВОДА РАКЕТЫ | 2010 |
|
RU2426071C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2014 |
|
RU2574497C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2016 |
|
RU2645023C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2131028C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |
| Устройство для арретирования маятника скважинного длиннопериодного сейсмометра | 1976 |
|
SU568923A1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА ОСНОВАНИЯ | 1969 |
|
SU257769A1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
Риг. 2
(риг. 3
