I
Изобретение относится к автоматическому управлению и регулированию технологическими параметрами, например давлением газа, температурой, расходом, процесс регулирования которых описывается дифференциальными уравнениями выше т-ретьего порядка и характеризуется широким диапазоном изменения физически взаимосвязанных регулируемых величин.
Изобретение предпочтительно использовать на предприятиях химической, металлургической промышленности в экспериментальной газодинамике для автоматического дозирования количества газа или жидкости.
Известна Система управления, содержащая рабочую камеру с соплом на выходе, соединенную через регулируюш,ий дроссель с баллонной сжатого газа, элемент сравнения, подключенный к блоку управления регулирующим органом, два блока контроля с датчиком и задатчиком давления. Сигнал управления через программный блок автоматически изменяет величину открытия регулирующего органа на величину, необхбдимую для поддержания заданного давленияЩ
Недостатком устройства является ограниченная точность предварительного открытия регулирующего органа при работе экспериментальной установки в условиях переменной плотности потока газа, связанной с изменением- чисел Рейнольдса в диапазоне докритических скоростей газового потока, где математическая зависимость па раметров, входящих в расчетные формулы, сущ,ественно отличается от случая критического истечения газа.
Наиболее близкой к предлагаемому является система автоматического регулирования давления, в которой повышена стабильность работы системы при различных скоростях истечения газа на входе и выходе объекта регулирования. Это достигается тем, что в известную систему автоматического регулирования введен узел коррекции давления, состоящий из блока задания температуры в рабочей камере, датчика температуры в камере высокого давления, блока задания площади среза сопла, блока задания величины газодинамической функции, блока задания чисел Маха 2.
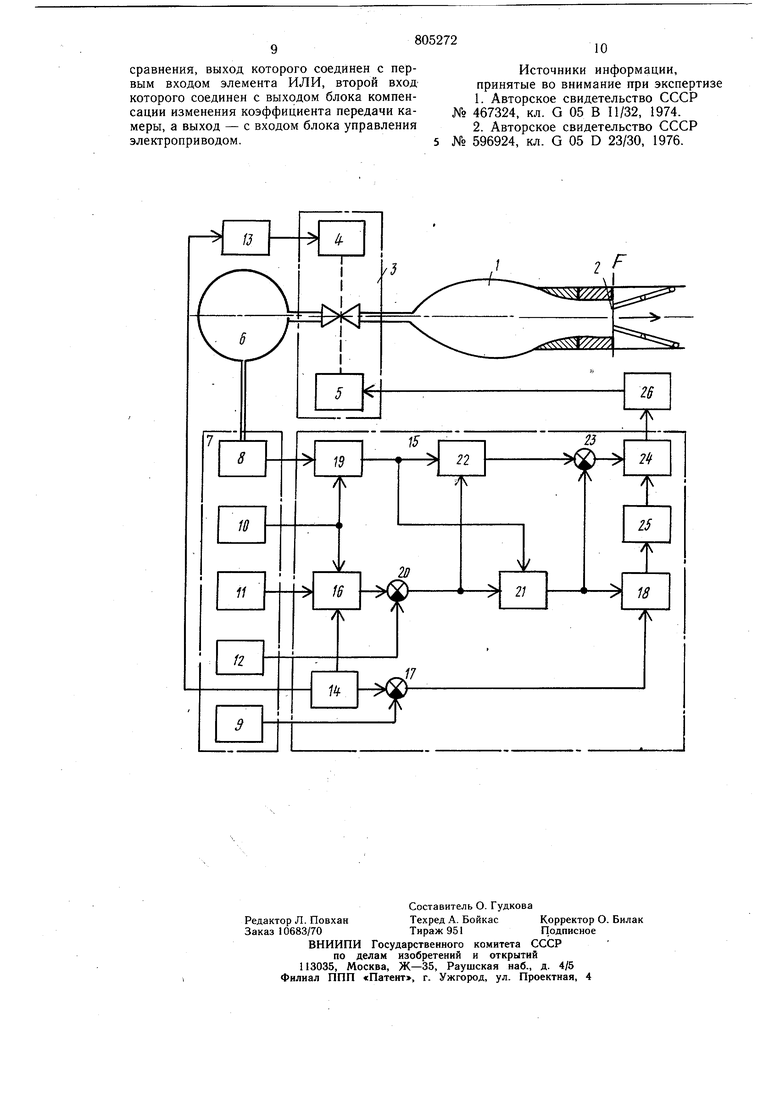
Однако рассматриваемая система использует регулирующий орган, максимальная скорость перемещения которого ограничена по условиям устойчивой работы. Используемый алгоритм упр,авления не обеспечивает оптимальных по времени переходных процессов, так как закон регулирования с линеаризацией процесса применим только при отклонении регулируемого параметра «в малом и не учитывает нелинейные связи, проявляющиеся в системе при отклонении «в большом в момент вывода объекта регулирования на режим. Цель изобретения - сокращение времени переходного процесса по давлению в проточной камере с оптимизацией перемещения запорно-регулирующего вентиля при различных возмущающих воздействиях и исключение влияния нелинейно связанных параметров на процессе регулирования, т. е. динамических характеристик устройства. Для систем автоматического управления, объекты регулирования давления газа которых характеризуются переменными взаимосвязанными параметрами, а уравнения движения имеют порядок выще третьего, число переменных величин равно 7-8. Создание систем автоматического управления с высоким качеством для таких объектов представляет -больщие трудности, а иногда становится невозможным, если эти переменные параметры к тому же значительно изменяются (на 2-3 порядка). Поставленная цель достигается тем, что в известной системе управления газодинамической установкой, содержащей баллонную сжатого газа, подключенную через регулируемый вентиль к проточной ка1мерой с критическим сечением, электроприводы регулируемого вентиля с блоком управления, датчики давления газа в баллонной и проточной камере, датчик температуры газа в баллонной, датчик критической площади выходного сечения, датчик положения регулируемого вентиля, блока постоянной времени проточной камеры, входы которого подключены к выходам датчиков давления газа в баллонной и критической площади выходного сечения, блок программы, вход которого соединен с первым входом элемента сравнения, второй вход которого подключен к выходу датчика давления газа в проточной камере, и блок компенсации изменения коэффициента передачи камеры, установлены пневмопривод регулируемого вентиля с блоком управления, подключенным к блоку программы, первый и второй дополнительные элементы сравнения, амплитудный компаратор, блок формирования поверхности переключения, блок вычисления фазовой траектории системы, элемент ИЛИ и блок вычисления величины открытия регулируемого вентиля, входы которого соединены с выходами блока программы, датчика критической площади выходного сечения и датчика температуры газа в баллонной, а выход - с первым входом первого дополнительного элемента сравнения, второй вход которого соединен с выходом датчика положения регулируемого вентиля, выход элемента сравнения через амплитудный компаратор соединен с входом блока компенсации изменения коэффициента передачи камеры, выход первого дополнительного элемента сравнения соединен с первыми входами блоков вычисления фазовой траектории системы и формирования поверхности переключения, выход блока постоянной времени проточной камеры соединен со вторыми входами блоков вычисления фазовой траектории системы и .формирования поверхности переключения, выходы которых соединены с первым и вторым входами второго дополнительного элемента сравнения, выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом блока компенсации изменения коэффициента передачи камеры, а выход - с входом блока управления электроприводом. Смысл предложенной структуры регулирования с учетом предложенной связи элементов системы состоит в том, что алгоритм автоматического управления сформирован путем непрерывного вычисления коэффициентов передачи объекта регулирования (проточной камеры) по управляющему, возмущающему воздействиям и постоянной времени с помощью измерения только определяющих параметров, характеризующих эти величины. Для сокращения числа определяющих параметров и упрощения блока компенсации коэффициент передачи по управляющему воздействию выражен через физические параметры возмущающего воздействия (падение давления в баллонной). Сигнал, пропорциональный коэффициенту передачи объекта регулирования, поступает в блок компенсации его изменения, а сигнал, прбпорциональной вычисленной постоянной времени, управляет форсирующим звеном, включенным в основной контур системы управления. При этом постоянная времени форсирующего звена в процессе работы системы непрерывно и автоматически поддерживается равной постоянной времени объекта.. Перемещен йе регулирующего органа осуществляется в соответствии с фазовой траекторией изображающей точки и поверхностью переключения регулирующего воздействия в фазовом пространстве, координаты которых непрерывно вычисляются по измеренным определяющим параметрам коэффициента передачи и постоянной времени объекта из условия построения системы, оптимальной по быстродействию. Принципиальное отличие предлагаемого рещения от известньгх состоит в том, что компенсация изменения коэффициентов передачи проточной камеры позволила сделать коэффициент усиления системы управления постоянным и значительно превышающим по величине необходимое значение. На чертеже представлена блок-схема, поясняющая работу системы управления газодинамической установкой, обеспечивающей процесс регулирования давления в проточной емкости. Проточная камера 1 с критическим сечением 2 на выходе соединена по входу регулируемым вентилем 3, который имеет пневмопривод 4 с малым временем перемещения вентиля и электропривод 5 с ограниченной скоростью перемещения регулируемого вентиля. Вход вентиля подсоединен к баллонной 6 сжатого газа. Система управления содержит блок 7 контроля с датчиком 8 давления газа в баллонной, датчиком 9 давления газа в проточной камере, датчиком 10 критической площади выходного сечения, датчиком 11 температуры газа в баллонной, датчиком 12 положения регулируемого вентиля. Вход пневмопривода 4 соединен через блок управления 13 с одним из выходов блока программы 14 регулятора 15, второй выход которого подключен к блоку 16 вычисления величины открытия регулируемого вентиля, а третий выход - к элементу 17 сравнения, второй вход которого связан с датчиком 9 давления газа. Выход элемента 17 сравнения подключен к амплитудному компаратору 18. Датчик 10 критического сечения подключен к одному из входов блока 19 постоянной времени проточной камеры и к одному из входов блока 16, к другому входу которого подключен датчик 11 температуры газа в баллонной. Датчик 8 давления газа в баллонной выходом подключен к блоку 19. Выход блока 16 через первый дополнительный элемент сравнения 20 связан со входами блока 21 формирования поверхности переключения и блоком 22 Вычисления фазовой траектории системы, вторые входы которых соединены с выходом блока 19 постоянной времени проточной камеры, а выходы соответственно подключены ко входам второго дополнительного элемента сравнения 23, выход которого связан с одним из входов,элемента 24 ИЛИ, второй вход которого через блок 25 компенсации изменения коэффициентов передачи камеры связан с выходом компаратора 18, второй вход которого подключен к выходу блока 21. Выход элемента 24 ИЛИ через блок 26 управления соединен с электроприводом 5. Устройство работает следующим образом. До начала работы в блоки программы 14 задают программу изменения регулируемого давления в проточной камере 14. Датчик 10 критического сечения на выходе камеры, датчик 11 температуры газа в баллонной и датчик 8 давления газа, в баллонной подают электрические сигналы соответствующйх величин в регулятор 15, где в соответствии с сигналами ожидаемой температуры и давления газа в камере, выдаваемых блоком программы 14, блок 16 вычисляет необходимую величину предварительного открытия регулируемого вентиля 3 по формуле: Р Р5 V YK ((Я.) где РК -регулируемое давление газа в проточной камере; - давление газа в питающей баллонной; К -температура газа в камере; Vj - температура газа в баллонной; - критическая площадь выходного сечения; )-. газодинамическая функция входного сечения (на запорно-регулирующем вентиле). Перечисленные величины являются определяющими параметрами проточной камеры, ее динамических характеристик (постоянной времени, коэффициентов передачи). Сигнал величины предварительного открытия, вычисленный в блоке 16, сравнивается в первом дополнительном элементе сравнения 20 с сигналом датчика 12 положения регулирующего клапана, перемещаемого электроприводом 5. Сигнал рассогласования с элемента сравнения 20 поступает на входы блока 21 формирования поверхности переключения и блока 22 вычисления фазовой траектории системы управления. С выходов блоков 21 и 22 через второй дополнительный элемент сравнения 23 м элемент 24 поступает в блок 26 управления электроприводом, который с помощью электропривода 5 обеспечивает необходимую величину открытия регулируемого вентиля 3. Величина необходимого предварительного открытия определяется как точка пересечения фазовой траектории системы, вь1численной блоком 22, и поверхнбсти переключения управляющего воздействия в фазовом пространстве, вычисленной блоком 21. В этот момент трубопровод, соединяющий баллонную 6 с проточной камерой 1, остается еще перекрытым, при помощи пневмопривода 4. С блока программы 14 сигнал управления поступает на пневмопривод 4, который быстро (за десятые доли секунд) открывает вентиль 3 на величину, предварительно установленную электроприводом 5. Газ из баллонной 6 поступает в проточную камеру 1, обеспечивая выход системы на заданный - - режим по давлению за минимальное время. Этот участок переходного процесса характеризуется больщими отклонениями регулируемой величины (О-95%) и значительными нелинейными связями определяющих параметров проточной камеры, Величина регулируемого давления, измеренная датчиком 9, сравнивается элеменом сравнения 17 и величиной давления. заданного в блоке программы 14. В момент, близкий к равенству сигналов, компаратор 8 отключает выход элемента сравнения 23, и сформированный в регуляторе 15 сигнал регулирования поступает в блок управлеления 26 гю каналу: блок 21 - компаратор 18 - б.лэк 25 компенсации - элемент 24 ИЛИ - блок 26 управления. В это время обеспечивается стабилизация регулируемого давления в объекте регулирования проточной камеры 1. Работа системы характеризуется в этот период отклонениями регулируемого параметра «в малом. Возникающие при работе системы автоматического управления изменения коэффициенк передачи проточной камеры компенсируются при помощи блока 25 компенсации коэффициентов передачи. Причем . /А К .цГ РЗ Ре Упр Купь -Коэффициент передачи проточной камеры по управляющему воздействию; Чодм Коэффициент передачи проточной камеры по возмущаемому воздействию. Значительное изменение инерционности проточной камеры на различных режимах компенсируются за счет оптимального построения поверхности переключения управляющего воздействия в фазовом пространстве при помощи блока 21, управляемого сигналом с блока 19 постоянной времени. При этом постоянная времени проточной камеры по делению вычисляется в блоке 19 по формуле: Т -5V Rv -F 5Pcf-2PK где R .- газовая простоянная; V объем проточной камеры. Таким образом, оптимальное быстродействие систе.мы управления обеспечивается за счет сочетания двух приводов в регуляторе давления: быстродействующего пневмопривода 4, скорость которого не регулируется, и электропривода 5 с глубоким регулированием скорости использования; определяющих параметров коэффициентов передачи и постоянной времени проточной камеры в компенсирующих устройствах 19, 21 к 25; алгоритма оптимального по быстродействию вывода системы автоматического улравления на режим по давлению, обеспечивающего с помощью схемы 22 для непрерывного вычисления фазовой траектории изображающей точки системы и блока 21 для непрерывного вычисления (поверхности) гиперплоскости) переключения в фазовом пространстве; блока 16 вычисления величины открытия запорно-регулирующего векТИЛЯ 3; предложенных связей между элементами. Использование предлагаемого изобретения позволяет придать системе автоматического управления свойства инвариантности и повысить качество: снизить погрещность с 1,5-2,0% до 0,5-0,8% ; сократить время переходного процесса с 7-8 с, до 4-5 с, снизить расход энергоресурсов на 14-18%; расщирить диапазон устойчивого регулирования до 2-х порядков. Формула изобретения Система управления газодинамической установкой, содержащ,ая баллонную сжатого газа, подключенную через регулируемый вентиль к проточной камере с критическим сечением,электропривод регулируемого вентиля с блоком управления, датчики давления газа в баллонной и проточной камере, датчик температуры газа в баллонной, датчик критической площади выходного сечения, датчик положения регулируемого вентиля, блок постоянной времени проточной камеры, входы которого подключены к выходам датчиков давления газа в баллонной и критической площади выходного сечения, блока, программы, выход которого соединен- с первым входом элемента сравнения, второй вход которого подключен к выходу датчика давления газа в проточной камере, и блок компенсации изменения коэффициента передачи камеры, отличающаяся тем, что с целью улучщения динамических характеристик систем, в ней установлены пне вмопривод регулируемого вентиля с блоком управления, подключенным к блоку программы, первый и второй дополнительные элементы сравнения, амплитудный компаратор, блок формирования поверхности переключения, б.лок вычисления фазовой траектории системы, элемент ИЛИ и блок вычисления величины открытия регулируемого вентиля, входы которого соединены с выхода.миблока программы, датчика критической площади выходного сечения и датчика температуры газа в баллонной, а выход - с первым входом первого дополнительного элемента сравнения, второй вход которого соединен с выходом датчика положения регулируемого вентиля, выход элемента сравнения через амплитудный компаратор соединен с входом блока компенсации изменения коэффициента передачи камеры, выход первого дополнительного элемента сравнения соединен с первыми входами блоков вычисления фазовой траектории системы и формирования поверхности переключения, выход блока постоянной времени проточной камеры соединен со вторыми входами блоков вычисления фазовой траектории системы и формирования поверхности переключения, выходы которых соединены с первым и вторым, входами второго дополнительного элемента
сравнения, выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом блока компенсации изменения коэффициента передачи камеры, а выход - с входом блока управления электроприводом.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 467324, кл. G 05 В 11/32, 1974.
2.Авторское свидетельство СССР 596924, кл. G 05 D 23/30, 1976.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования соотношения расходов двух смешиваемых потоков | 1982 |
|
SU1062658A1 |
| Система регулирования давления газа | 1986 |
|
SU1425620A1 |
| Система для регулирования температуры газа в проточной камере | 1979 |
|
SU873218A1 |
| Устройство для регулирования температуры в камере газового потока | 1977 |
|
SU658535A1 |
| Регулятор расхода | 1977 |
|
SU661516A1 |
| Устройство для измерения температуры торможения газа в проточной камере | 1979 |
|
SU883674A1 |
| Система автоматического регулирования давления в газодинамической установке | 1975 |
|
SU596921A1 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ ДЛЯ ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 2021 |
|
RU2779721C1 |
| Система автоматического регулирования давления | 1977 |
|
SU746411A2 |
| КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ | 2016 |
|
RU2660757C2 |
