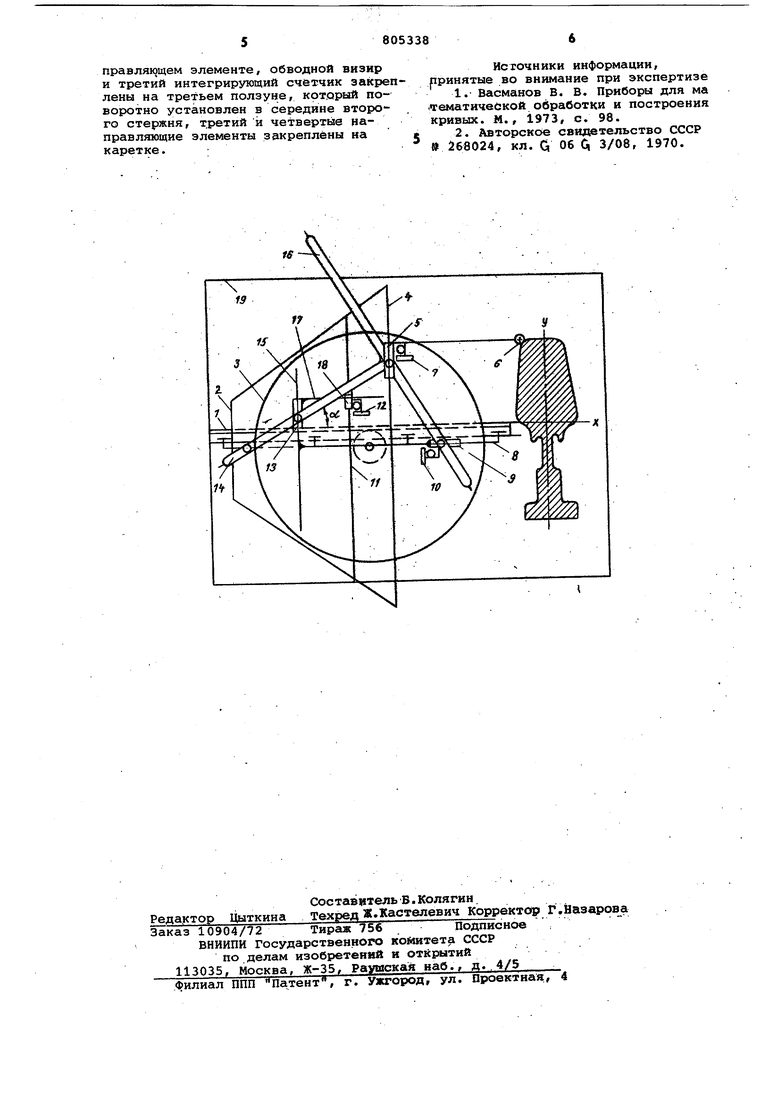
(54) ИНТЕГРАТОР рычагов и соединенной с ними направ ляющей штанги не позволяет получить высокую точность вычислений. Цель изобретения - увеличение быстродействия, точности и расшире 5ия области применения существуквдег интегратора. Поставленная цель достигается тем что в интегратор введены третий интегрирующий счетчик, четвертый ползун, пятый и шестой направляющие эл менты, во втором стержне.выполнена продольная прорезь, в которой распо ложен первый ползун, который прикреп лен к пятому напра.вляющему элементу расположенному перпендикулярно первому направляющему элементу, параллельно которому расположен шестой направляющий элемент, который соеди нен со вторым ползуном и прикреплен к четвертому ползуну, соединенному с первым стержнем и -расположенному н пятом направляющем элементе, обводно визир и третий интегрирующий счетчик закреплены-на третьем ползуне, который поворотно установлен в середине. второго стержня, третий и четвертый направляющие элементы закреплены на каретке. На чертеже изображена кинематическая схема интегратора. На первом направляющем элементе 1 установлена каретка 2 с дисковым фрикционом 3. На четвертом направляющем элементе 4 расположен третий ползун 5, к которому прикреплен обводной визир б и .третий интегрирующий счетчик 7. На втором направляющем элементе 8 установлен первый пол зун 9, к которому прикреплен первый интегрирующий счетчик 10, а на третьем направляющем элементе 11 установлен второй интегрирующий счетчик 12. Второй 8, третий 11 и четвертый 4 направляющие элементы закреплены на каретке 2. Четвертый ползун 13 соединен с первым стержнем 14 элемента связи и расположен на пятом направляющем элементе 15, который прикреплен к-первому ползуну 9. Третий ползун 5 установлен поворотно в середине второго стержня 16 элемента связи, в продольной прорези которого расположен первый ползун 9. Шестой направляющий элемент 17 прикреплен к четвертому ползуну 13 и соединен со вторым ползуном 18, к которому прик1 еплен второй интегрирующий счетчик 12. Обводной визир б сопряжен с планшетом 19, на поверхности которого на несен контур измеряемой площади. Интегратор работает следующим образом. . Первый направляющий элемент 1 рас полагают вдоль заданной оси, принимаемой за ось X, а обводкой визир 6в .начсшьной точке контура измеряемой площади. Перемещают третий ползун 5 таким образом, чтобы обводной визир 6 двигался по контуру измеряемой площади в одном направлении. При этом посредством третьего ползуна 5 четвер(,тую направляющую 4 движение передает .ся каретке 2 и связанному с ней дисковому фрикциону 3, который приводит в действие интегрирующие счетчики 7, 10 и 12. При этом интегрирующие счетчики перемещаются по отношению к осям дискового фрикциона 3 на расстояния atgoi, atgoC, atg где а - некоторая постоянная прибора . Об - угол наклона первого стержня 14 элемента связи к оси X. Это позволяет определить па| аметЕНз1 плоской фигуры показаниями интегрирующих счетчиковв виде конечных величин . площади статического мЪмента относительно оси X момента инерции относительно оси X x .-,, р у .. Формула изобретения Интегратор, содержащий первый направляющий элемент, на котором установлена каретка, на каретке поворотно расположен дисковый фрикцион, сопряженный с первым и вторым интегрирунвдими счетчиками, которые закреплены соответственно на первом и втором ползунах, которые расположёны соответственно на втором и третьем направляющих элементах, второй направляющий элемент закреплен на каретке, четвертый направляющий элемент с установленным на нем третьим ползуном, элемент связи, выполненный в виде первого стержня и прикрепленного к нему под прямым второго стержня, и обводной визир, отличающийся тем, что, с целью увеличения быстродействия, точности и расширения области применения устройст-. ва, в него введены третий интегрирующий счетчик, четвертый ползун, пятый и шестой направляющие элементы, во втором стержне выполнена продольная прорезь, в которой расположен первый ползун, который прикреплен к пятому направляющему элементу, расположённому перпеидикулярно первому направляю1аему элементу, параллельно которому расположен шестой направляющий элемент, который соединен со вторым ползуном и прикреплен к четвертому ползуну, соединенному с первым стержнем и расположенному на пятом направляющем элементе, обводной визир и третий интегрирующий счетчик закреп лены на третьем ползуне, который поворотно установлен в середине второго стержня, т.ретий и четвертые направляющие злементы закреплены на каретке.
Источники информации, рринятые во внимание при экспертизе 1. Васманов В. В. Приборы для ма тематической обработки и построения кривых. М., 1973, с. 98. 5 2. Авторское свидетельство СССР №268024, кл. О 06 С| 3/08, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический интегратор | 1982 |
|
SU1034047A1 |
| Вычислительное устройство | 1984 |
|
SU1241263A1 |
| Вычислительное устройство | 1983 |
|
SU1115065A1 |
| Вычислительное устройство | 1985 |
|
SU1290362A1 |
| Вычислительное устройство | 1986 |
|
SU1472921A1 |
| Вычислительный прибор | 1983 |
|
SU1109762A1 |
| Вычислительное устройство | 1985 |
|
SU1283799A1 |
| Вычислительное устройство | 1985 |
|
SU1264207A1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 1999 |
|
RU2171448C2 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 2003 |
|
RU2244255C2 |
