Изобретение относится к области железнодорожной автоматики и предназначено для использования на железнодорожных станциях, имеющих сортировочные горки.
На сортировочных станциях применяются системы для контроля заполнения путей (КЗП), построенные на индуктивных датчиках осей, индуктивно-проводных датчиках, КЗП с использованием рельсовых нитей для передачи сигнала. Датчики контролируют прохождение тока в рельсе, который разбит на участки. В различных устройствах КЗП наличие тока свидетельствует о свободности или занятости пути. Вместо датчиков могут использоваться катушки индуктивности и трансформаторы. Наличие информации о степени и характере заполнения сортировочных путей позволяет сформировать и передать по стандартным каналам связи эту информацию в автоматизированную систему управления сортировочными станциями и маневровому диспетчеру с тем, чтобы скорректировать план (последовательность) роспуска составов с учетом заполнения путей сортировочного парка
Другой разновидностью системы КЗП является контроль заполнения путей с использованием метода импульсного зондирования (КЗП-ИЗ), основная идея которого состоит в том, чтобы посылать в рельсовую линию импульс напряжения и по форме кривой переходного процесса рассчитывать длину свободной рельсовой линии.
Недостатками данных устройств являются недостаточная точность определения координат отцепов, влияние климатических условий и времени суток, ограниченная зона действия, использование большой кабельной сети.
Учитывая, что существующие известные отечественные системы КЗП не обеспечивают в силу разных причин устойчивую работу по определению длины, свободной от вагонов начальной части пути, особую актуальность приобретает проблема создания надежной системы контроля заполнения путей с расширенными функциональными возможностями.
Наиболее близким из известных по своей технической сущности и достигаемому результату является выбранное в качестве прототипа устройство для контроля заполнения путей сортировочного парка (RU 2003542, B61L 17/00, 1993 г.).
Это изобретение относится к радиолокации и может быть использовано в системах контроля и управления движением транспортных средств. Устройство содержит установленный у тормозной позиции каждого пути сортировочного парка радиолокационный скоростемер с приемопередающей антенной, блок ввода информации, блок памяти длины сортировочного пути, блок вывода информации, блок измерения длины отцепа, блок измерения расстояния до отцепа, радиотехнический путевой датчик, установленный на выходе из тормозной позиции, блок определения ускорения, блок определения прогнозной длины свободного участка пути, селектор канала трансляции информации о расстоянии до отцепа. Эти блоки объединены в схему, позволяющую измерять и регулировать скорость скатывания отцепов на сортировочных горках.
Известное техническое решение обеспечивает измерение скорости отдельного транспортного средства, измерение длины отцепа и сопоставление этих параметров с расстоянием до предыдущего отцепа. При этом в блоке вывода информации собирается исчерпывающая информация о состоянии данного сортировочного пути подгорочного парка.
Недостатком данного устройства является ограниченная зона действия радиолокационного скоростемера, не позволяющая измерять скорость движения отцепов на всем протяжении скатывания, большое количество задействованных различных функциональных блоков и множество схемотехнических зависимостей между ними, а также отсутствие дублирования аппаратуры (неисправность любого блока приведет к выходу из строя всего устройства).
Технический результат изобретения заключается в повышении точности радиолокационного сопровождения движущихся единиц (вагонов) по всей территории сортировочного парка от момента въезда до момента вытяжки сформированного состава из парка и определении положения всех транспортных единиц подвижного состава в реальном масштабе времени.
Указанный технический результат достигается тем, что в систему радиолокационного контроля заполнения путей сортировочного парка, содержащую радиолокационный измеритель и блок обработки сигнала и управления, согласно изобретению, введены центральный вычислительный комплекс, состоящий из Ethernet-коммутатора с подключенными к нему двумя компьютерами-вычислителями, синхронизаторы, каждый из которых состоит из генератора синхроимпульсов, Ethernet-коммутатора и промышленного контроллера, подключенного к генератору синхроимпульсов и входу Ethernet-коммутатора, и выносные модули, каждый из которых включает в себя радиолокационный измеритель, соединенный через блок обработки сигнала и управления с промышленным компьютером, при этом к радиолокационному измерителю подключены приемная и передающая антенны, промышленный компьютер каждого выносного модуля соединен с генератором синхроимпульсов и Ethernet-коммутатором синхронизатора, который посредством линии связи соединен с Ethernet-коммутатором центрального вычислительного комплекса, каждый выносной модуль закреплен на осветительной опоре и расположен над путями сортировочного парка.
Система радиолокационного контроля заполнения путей сортировочного парка (РЛС-КЗП) предназначена для выполнения следующих функций:
- обеспечения мониторинга единиц подвижного состава на всей территории сортировочного парка;
- обеспечения радиолокационного сопровождения движущихся единиц подвижного состава от момента их въезда в сортировочный парк до момента вытяжки сформированного состава из парка;
- определения местоположения (координаты) всех транспортных единиц подвижного состава, находящихся в зоне контроля в реальном масштабе времени;
Система обеспечивает получение текущей информации о движении единиц подвижного состава на всей территории сортировочного парка в реальном масштабе времени.
На чертеже представлена структурная функциональная схема системы радиолокационного контроля заполнения путей сортировочного парка.
Система содержит центральный вычислительный комплекс 12, состоящий из Ethernet-коммутатора 10 с подключенными к нему двумя компьютерами-вычислителями 11, синхронизаторы 6, каждый из которых состоит из генератора синхроимпульсов 9, Ethernet-коммутатора 8 и промышленного контроллера 7, подключенного к генератору синхроимпульсов 9 и входу Ethernet-коммутатора 8, и выносные модули, каждый из которых включает в себя радиолокационный измеритель 3, соединенный через блок обработки сигнала и управления 2 с промышленным компьютером 1, при этом к радиолокационному измерителю 3 подключены приемная 4 и передающая 5 антенны, промышленный компьютер 1 каждого выносного модуля соединен с генератором синхроимпульсов 9 и Ethernet-коммутатором синхронизатора 8, который посредством линии связи соединен с Ethernet-коммутатором 10 центрального вычислительного комплекса 12, каждый выносной модуль закреплен на осветительной опоре и расположен над путями сортировочного парка.
Вычислителями 11 центрального вычислительного комплекса (ЦВК) 12 выполняются следующие функции:
- связь с внешней информационной комплексной системой автоматизированного управления сортировочным процессом (КСАУ СП);
- синхронизация и привязка шкалы времени;
- планирование и диспетчеризация наблюдений радиолокационными измерителями (РИ) 3;
- формирование и отправка в напольное оборудование исходных данных для наблюдений РИ 3;
- прием данных от напольного оборудования;
- часть первичной сигнальной обработки;
- вторичная статистическая обработка.
Синхронизатор 6 выполняет операцию самостоятельной постройки задержек синхросигналов при большом различии длин соединительных кабелей. Команда на выдачу синхросигналов требуемой паре радиолокаторов РИ 3 формируется ЦВК 12 и через Ethernet-коммутатор 10 передается в генератор синхроимпульсов 9, который через Ethernet-коммутатор синхронизатора 8 и промышленный контроллер 7 подает сигнал синхронизации двум из восьми, подключенным к нему радиолокаторам РИ 3, указанным в команде.
При работе генератор РИ 3 излучает зондирующие импульсы. Приемник РИ 3 принимает отраженный сигнал с указанного строба дальности и производит обработку этого сигнала. Обработка сигнала в приемнике РИ 3 в каждом периоде зондирования включает в себя три основных стадии:
- фазовое детектирование принятого сигнала с опорным сигналом, являющимся по форме копией зондирующего сигнала передатчика;
- усиление сигнала;
- оцифровка сигнала и передача его в блок обработки сигнала и управления (плата ПОСУ) 2.
Плата ПОСУ 2 осуществляет высокоскоростную первичную обработку сигнала по алгоритму скользящего среднего и передает обработанный сигнал в промышленный компьютер 1 для его последующей обработки и передачи по внешнему интерфейсу. Она также обеспечивает управление элементами плат приемника и генератора РИ 3.
Приемная 4 и передающая 5 антенны выносных модулей (ВМ) выполнены на базе зеркальной параболической антенны "СТВ-0.6-1.1 АУМ", дооборудованной специально разработанными широкополосными облучателями.
Промышленные компьютеры 1 выполняют следующие функции:
- самоидентификацию в сети и сетевое взаимодействие;
- подачу управляющих команд в плату ПОСУ 2;
- синхронизацию и привязку шкалы времени;
- прием и измерение данных из платы ПОСУ 2;
- часть первичной сигнальной обработки;
- отправку результатов измерений в ЦВК 12.
Система РЛС-КЗП определяет следующие параметры положения отцепов на территории сортировочного парка:
- Скорости движения отцепов, при этом погрешность определения скорости движения в диапазоне скоростей от 0 до 1,5 м/с должна быть не более 5%, при скоростях свыше 1,5 м/с - не более 2%; минимальная оцениваемая скорость движения отцепов по сортировочным путям 0,2 м/с.
- Координаты точек прицеливания по каждому сортировочному пути (координаты хвоста и длина отцепа); погрешность определения координаты остановки отцепа на путях сортировочного парка - не хуже 5 м.
- Степень заполнения сортировочного пути (коэффициент полезного заполнения), определяемая как суммарная длина окон между стоящими не сцепленными подвижными единицами по каждому сортировочному пути в реальном масштабе времени; распределение окон вдоль сортировочного пути; определяемая длина окна не менее 3 м.
Обновление информации о скорости движущегося отцепа, как и координаты его перемещения на путях сортировочного парка, должно происходить не реже чем через интервал времени, за который отцеп проходит путь не более 5 м.
Система радиолокационного контроля заполнения путей работает следующим образом.
При роспуске составов ЦВК 12 формирует и выдает команду управления соответствующих ВМ, в зоне ответственности которых будет происходить движение отцепов, и эти ВМ переходят в режим ожидания отцепов.
В режиме ожидания строб ВМ устанавливается на минимальной дальности в соответствующей элементарной области обзора. Радиолокационный сигнал с этой минимальной дальности постоянно поступает в ЦВК 12. При появлении отцепа в стробе, ВМ формирует информацию о дальности до отцепа и его скорости. После обнаружения отцепа и определения его скорости, система переходит из режима «ожидания» в режим «сопровождения». ЦВК 12 составляет прогнозируемую траекторию движения отцепа, согласно которой осуществляется управление положением строба ВМ. Прогнозируемая трасса движения отцепа постоянно корректируется на основе получаемых измерений. На основании скорректированной трассы формируется информация о координате остановки отцепа.
Система РЛС-КЗП основана на использовании сверхширокополосных радиолокаторов с длительностью сигнала порядка 4 нс. Каждый радиолокатор РИ 3 ведет наблюдение в зоне ответственности, ограниченной шириной его диаграммы направленности. В пределах этой зоны радиолокатор РИ 3 производит обнаружение объектов в узких стробах по дальности, длина которых лежит в пределах 1-0,5 метра
При этом для измерения скорости движения транспортных средств и контроля заполнения путей сортировочного парка, их облучение осуществляется одновременно несколькими маломощными высокоинформативными сверхширокополосными РЛС, объединенными единым информационным пространством, расположенными рядами, таким образом, что каждая подвижная единица попадает в поле действия нескольких РЛС, установленных по ходу движения или действующих вслед.
Экономическая эффективность от внедрения предлагаемой системы радиолокационного контроля заполнения путей сортировочного парка достигается за счет следующих факторов:
- сокращение времени простоя вагонов за счет уменьшения времени на роспуск составов и маневровые передвижения;
- снижение эксплуатационных затрат по хозяйству СЦБ. Аппаратура РЛС КЗП не требует периодического обслуживания в условиях РТУ и эксплуатируется до предельного состояния. Функциональность РЛС-КЗП сохраняется при выходе из строя до 20% элементов системы, работоспособность - при выходе из строя до 50% элементов системы;
- снижение капитальных затрат при новом строительстве, за счет сокращения жил кабеля при монтаже постового оборудования более чем в 5 раз (на 80%);
- снижение энергопотребления более чем в 3 раза (на 67%), за счет применения современной элементной базы, сокращения единиц оборудования и использования современных технических решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2431865C2 |
| Оптическое устройство для контроля заполнения пути | 2018 |
|
RU2682523C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ВАГОНОВ В ПАРКЕ СТАНЦИИ | 2014 |
|
RU2578703C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2308750C1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2835234C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| Способ определения ходовых свойств вагонов для корректировки работы подсистемы автоматического роспуска составов горочного комплекса | 2018 |
|
RU2689668C1 |
Изобретение относится к области железнодорожной автоматики и предназначено для использования на железнодорожных станциях, имеющих сортировочные горки. Система содержит радиолокационный измеритель и блок обработки сигнала и управления, введены центральный вычислительный комплекс, состоящий из Ethernet-коммутатора с подключенными к нему двумя компьютерами-вычислителями, синхронизаторы, каждый из которых состоит из генератора синхроимпульсов, Ethernet-коммутатора и промышленного контроллера, подключенного к генератору синхроимпульсов и входу Ethernet-коммутатора. В систему введены выносные модули, каждый из которых включает в себя радиолокационный измеритель, соединенный через блок обработки сигнала и управления с промышленным компьютером. К радиолокационному измерителю подключены приемная и передающая антенны. Промышленный компьютер каждого выносного модуля соединен с генератором синхроимпульсов и Ethernet-коммутатором синхронизатора, который посредством линии связи соединен с Ethernet-коммутатором центрального вычислительного комплекса. Технический результат изобретения заключается в повышении точности радиолокационного сопровождения движущихся единиц (вагонов) по всей территории сортировочного парка от момента въезда до момента вытяжки сформированного состава из парка и определении положения всех транспортных единиц подвижного состава в реальном масштабе времени. 1 ил.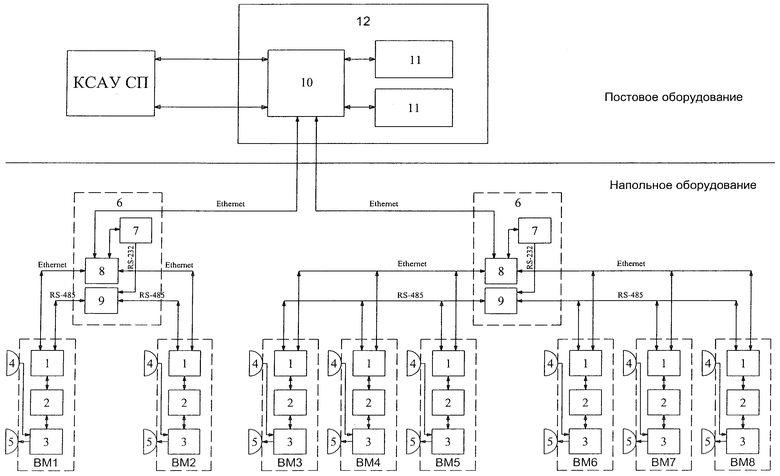
Система радиолокационного контроля заполнения путей сортировочного парка, содержащая радиолокационный измеритель и блок обработки сигнала и управления, отличающаяся тем, что в нее введены центральный вычислительный комплекс, состоящий из Ethernet-коммутатора с подключенными к нему двумя компьютерами-вычислителями, синхронизаторы, каждый из которых состоит из генератора синхроимпульсов, Ethernet-коммутатора и промышленного контроллера, подключенного к генератору синхроимпульсов и входу Ethernet-коммутатора, и выносные модули, каждый из которых включает в себя радиолокационный измеритель, соединенный через блок обработки сигнала и управления с промышленным компьютером, при этом к радиолокационному измерителю подключены приемная и передающая антенны, промышленный компьютер каждого выносного модуля соединен с генератором синхроимпульсов и Ethernet-коммутатором синхронизатора, который посредством линии связи соединен с Ethernet-коммутатором центрального вычислительного комплекса, каждый выносной модуль закреплен на осветительной опоре и расположен над путями сортировочного парка.
| RU 2003542 C1, 30.11.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2308750C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, ПЕРЕМЕЩАЮЩЕГОСЯ ВДОЛЬ СРЕДСТВА РАСПРОСТРАНЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1996 |
|
RU2181680C2 |
| EP 0736441 A1, 09.10.1996 | |||
| Электрическая конвейерная печь для закалки напильников | 1937 |
|
SU54348A1 |

