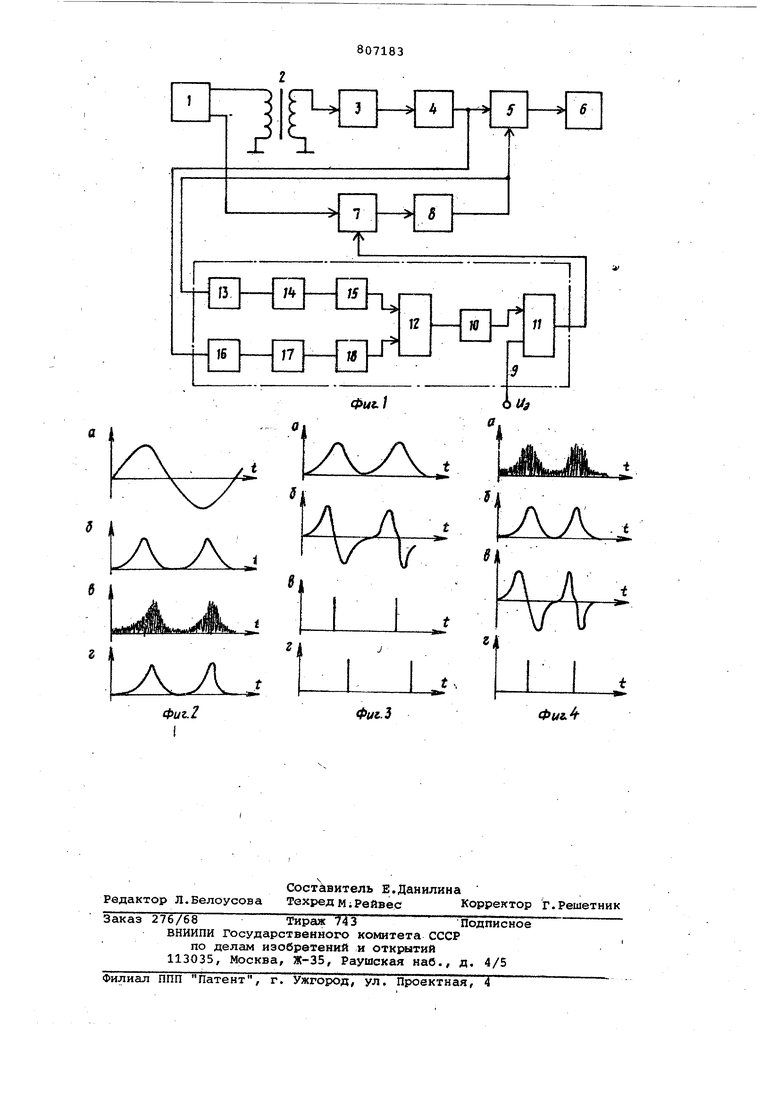
(54) УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОГИБАЮ1ШЙ МАГНИТНОГО №МА первого дифференциатора, формирователя и эвена задержки, выход которого соединен с первым входом триггера, последова-гельно соединенных фильтра, второго дифференциатор и формирователя, выход которюго сое динен со вторым входом триггера, при этом вход первогодифференциато соединен с первым входом, а вход фильтра со вторым входом блока управления, подключенного к выходу триггера, а также подключенных к выходу триггера последовательно сое диненных интегратора и дифференциального усилителя. На фиг. 1 представлена структурная схема устройства; на фиг. 2, 3 и 4 временные диаграммы, кото1 ле поясняют принцип работы. Устройство включает последовательно соединенные блок 1 питания, датчик 2, усилитель 3,. детектор 4, фильтр нижних частот 5 электрически регулнруегнюй частоты среза и бло 6 вьщеления информативного параметра. Кроме того, устройство содержит последовательно соединенные управля емый фазовЕ ащатель 7, сигнальный вход которого подключен к блоку 1 питания, и блок 8 нелинейности, а также блок 9 управления, выход которого соединен с управляющим входом фазоврагаателя 7, первый вход вместе с упр авлякя 1им входом фильтра 5 соединен с выходом блока 8 нелинейности, а второй вход - с выходом детектора 4, Влок 9 управлени выполнен в виде интегратора 10 и дифференциального усилителя 11, а также в виде триггера 12, последова тельно соединенных первого дифференциатора 13, фор мцрователя 14 и зв на 15 задержки, вьйюд которого соединен с первым входом фриггера 12, а также последовательно соединенных фильтра 16, второго дифференциатора 17 и форвиирователя 18, выход которого соединен со вторым входом триггера 12, при этом вход первого дифференциатора 13 является первым входом, а вход фильтра 16 - вторым входом блока 9 управления. Устройство работает следугачим образом. Синусоидальный ток, создаваемый источником 1 питания, протекая по первичной обмотке датчика 2, перемагничивают ферромагнитный образец Во вторичной обмотке индуцируются импульсы -ЭДС от необратимых изменений намагниченности сердечника, которые усиливалотся усилителем 3 и д тектируются детектором 4. Далее сиг нал сглаживается фильтром 5 и поступает в блок 6 выделения информа.тивного параметра 6, где измеряется необходимая хатактеристика огибающе шума. Для уменьшения погрешностей, обусловленных нестационарностью сигнала, необходимо изменять частоту среза фильтра 5 пропорционально огибающей мгновенной мощности сигнала. Принцип формиЕ ования управляющего сигнала на том, что в большинстве практических случаев огибающая с достаточной точностью описывается выражением U Acosol-Bt, где X - целое и равно 2+5. Таким образом, управляющий сигнал .можно получить путем нелинейного преобразования сигнала блока 1 питания. На фиг. 2 показаны следующие сигналы : а) сигнал с блока питания 1; . б) предыду1чий сигнал, нелинейно преобразованный путем возведения в четвертую степень; в)сигнал с выхода детектора 4; г)огибающая шума, снятая для наиболее типичных случаев. Как видно, сигналы на фиг. 26 и 2г достаточно одинакова изменяются во времени. Значения уровней сигналов на всех диаграммах отложены в относительных единицах. Помимо формирования управляющего сигнала, очевидно, необходимо совместить его по времени со сглаживаемым сигналом. Эти две операции реализованы в устройстве (фиг. 1) с помощью управляемого фазоврагцателя 7 и блока 8 нелинейности. Сигнал с блока 1 питания поступает на вход фазовращателя 7 и затем с некоторым фазовым сдвигом на вход блока 8 нелинейности. С блока 8 нелинейности сигнал, близкий по форме к огибанвдей, поступает на управляющий вход фильтра 5, изменяя его частоту среза (в частности, чем больше сигнал, тем меньше частота ереза). Временный сдвиг между огибаю11ей шума и сигналом с выхода блока 8 нелинейности при фиксированном фазовом сдвиге, вносимом фазовращателем У, зависит как от характеристик образца (коэрцитивная сила), так. и от режима перемагничивания (частота и амплитуда перемагничивающего тока). Поэтому необходимо постоянно следить за временным сдвигом сигналов и управлять величиной фазового сдвига. Эту функцию выполняет блок 9 управления. Рассмотрим работу блока управления. Схема выделения временного сдвига формирует импульс, длительность которого пропорциональна временному сдвигу между управляющим и сглаживаемым сигналом. Этот импульс преобразуется интегратором 10 в пропорциональный уровень напряжения, которое . в дифференциальном усилителе 11 сравнивается с эталонным напряжением Uj, Разность этих напряжений воздействует на управляющий вход фазовращателя 7. Первоначально устанавливают величину эталонного напряжения так, чтобы совместить сигналы во времени (например с помощью осциллографа) . В дальнейшем блок 9 управления Судет отслеживать любое рассогласование вне зависимости от того, чем оно вызвано.
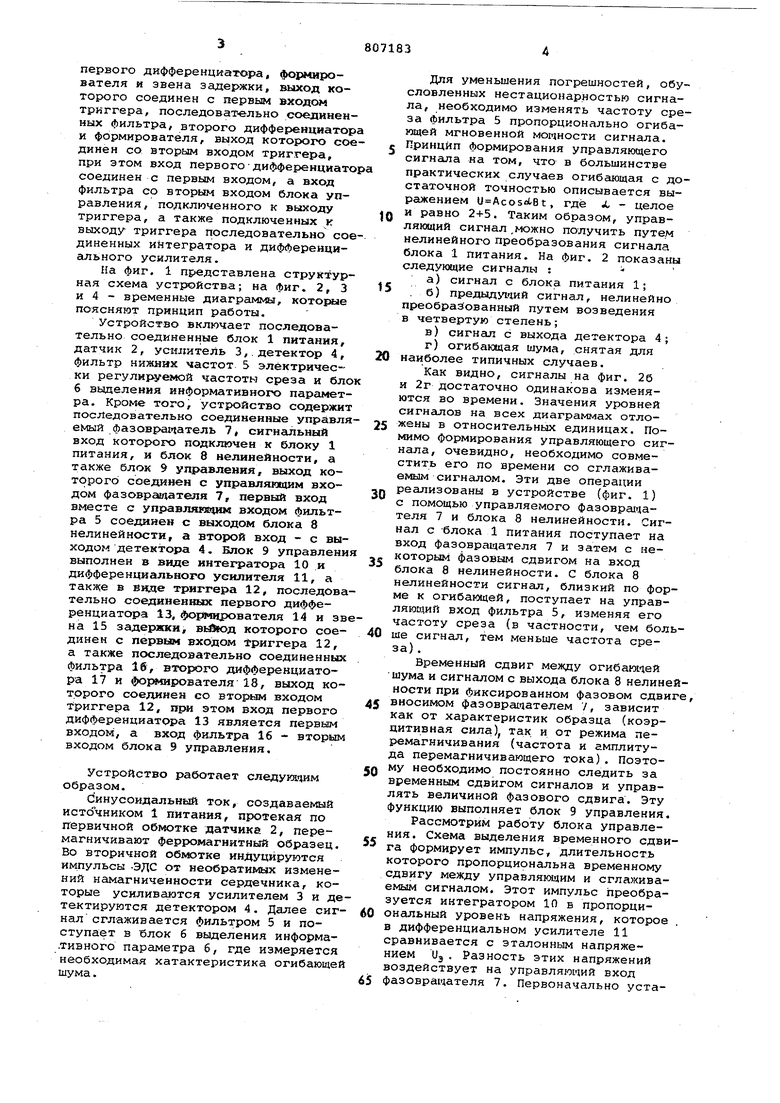
Принцип работы схемы выделения временного сдвига поясняется временными диаграммами (фиг. 3 и 4). Сигнал с выхода блока 8 ьвлмнейности (фиг. За) поступает на первый дифференциатор 13 и далее на формирователь 14 (фиг. Зб). Выходной импульс с формирователя проходит через звено задержки 15 (фиг. Зв) и далее поступает на вход установки О триггера 12 (фиг. Зг).
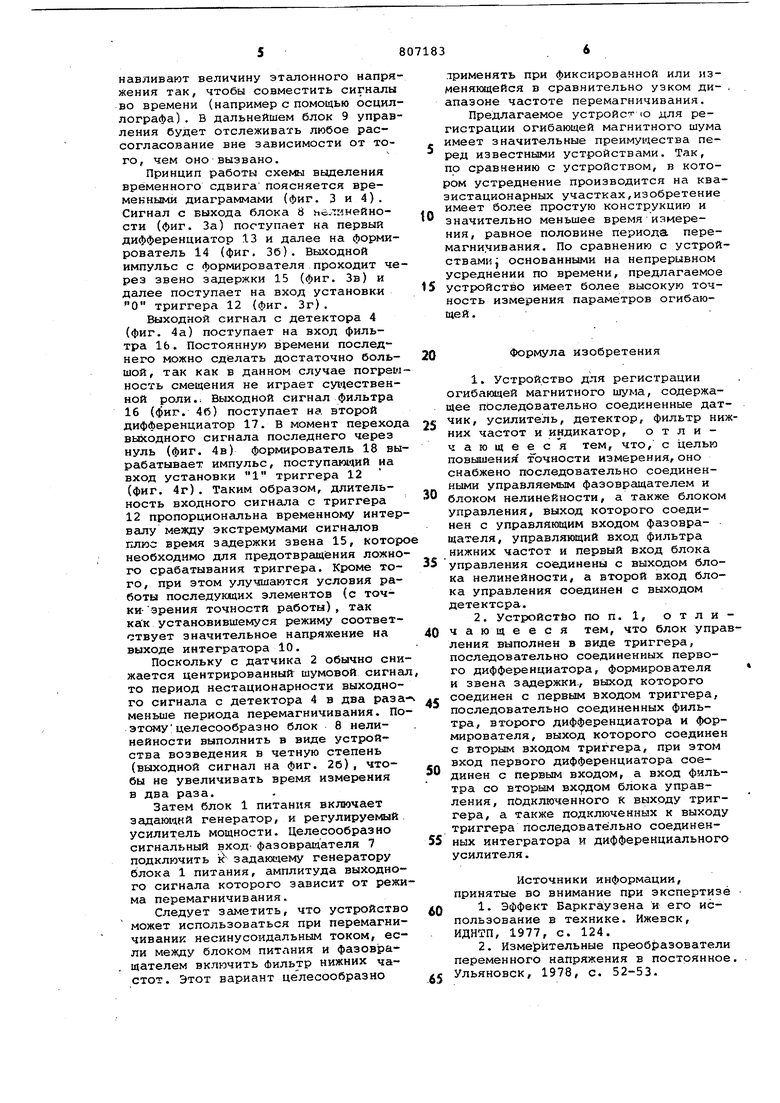
Выходной сигнал с детектора 4 (фиг. 4а) поступает на вход фильтра 16. Постоянную времени последнего можно сделать достаточно большой, так как в данном случае погрешность смещения не играет существенной роли.; Выходной сигнал фильтра 16 (фиг. 46) поступает на. второй дифференциатор 17. В момент перехода выходного сигнала последнего через нуль (фиг. 4в) формирователь 18 вырабатывает импульс, поступающий на вход установки 1 триггера 12 (фиг. 4г). Таким образом, длительность входного сигнала с триггера 12 пропорциональна временному интервалу между экстремумами сигналов плюс время задержки звена 15, которо необходимо для предотвращения ложного срабатывания триггера. Кроме того, при этом улучшаются условия работы последующих элементов (с точки- зрения точности работы), так как установившемуся режиму соответствует значительное напряжение на выходе интегратора 10.
поскольку с датчика 2 обычно снижается центрированный шумовой сигнал то период нестационарности выходного сигнсша с детектора 4 в два разаменьше периода перемагничивания. Поэтому целесообразно блок 8 нелинейности выполнить в виде устройства возведения в четную степень (выходной сигнал на фиг. 26), чтобы не увеличивать время измерения в два раза.
Затем блок 1 питания включает задающий генератор, и регулируемый, усилитель мощности. Целесообразно сигнальный вход- фазовращателя 7 подключить задающему генератору блока 1 питания, амплитуда выходного сигнала которого зависит от режима перемагничивания.
Следует заметить, что устройство может использоваться при перемагничиваник несинусоидальным током, если между блоком питания и фазовращателем включить Фильтр нижних частот. Этот вариант целесообразно
применять при фиксированной или изменяющейся в сравнительно узком ди- . апазоне частоте перемагничивания.
Предлагаемое устройст ю для регистрации огибающей магнитного шума имеет значительные преимущества перед известными устройствами. Так, по сравнению с устройством, в котором устреднение производится на квазистационарных участках,изобретение имеет более простую конструкцию и значительно меньшее время измерения, равное половине периода перемагни.чивания. По сравнению с устройствами j основанными на непрерывном усреднении по времени, предлагаемое
5 устройство имеет более высокую точность измерения параметров огибающей.
Формула изобретения
0
1.Устройство для регистрации огибающей магнитного шума, содержащее последовательно соединенные датчик, усилитель, детектор, фильтр нижSних частот и индикатор, о т л и чающее ся тем, что, с целью повышения точности измерения, оно снабжено последовательно соединенными управляемым фазовращателем и
0 блоком нелинейности, а также блоком управления, выход которого соединен с управляющим входом фазовращателя, управляющий вход фильтра нижних частот и первый вход блока
5 управления соединены с выходом блока нелинейности, а второй вход блока управления соединен с выходом детектора.
2.Устройстйо по п. 1, отли0чающееся тем, что блок управления выполнен в виде триггера, последовательно соединенных первого дифференциатора, формирователя
и звена задержки., выход которого соединен с первым входом триггера,
S последовательно соединенных фильтра, второго дифференциатора и формирователя, выход которого соединен с вторым входом триггера, при этом вход первого дифференциатора соеOдинен с первым входом, а вход фильтра со вторьам вхрдом блока управления, подключенного к вьзходу триггера, а также подключенных к выходу триггера последовательно соединен5ных интегратора и дифференциального усилителя.
Источники информации, принятые во внимание при экспертизе
1.Эффект Баркгаузена и его исОпользование в технике. Ижевск, ИДНТП, 1977, с. 124.
2.Измерйтельные преобразователи переменного напряжения в постоянное. Ульяновск, 1978, с. 52-53.
5
bUi
Фие.1
УУУУ t
/
УУ А .
..
1
г
УУ л г
Фиг.2
Фи1.
Фиг,.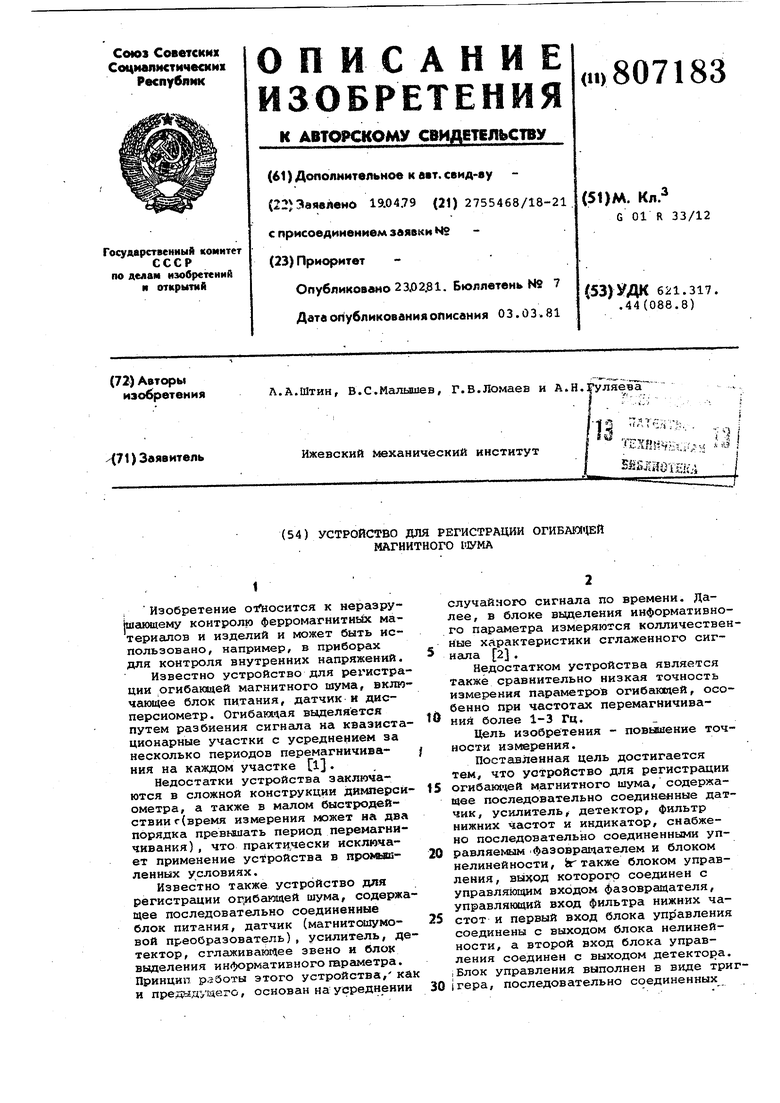
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОАНАЛОГОВЫЙ ФАЗОВРАЩАТЕЛЬ | 1992 |
|
RU2023273C1 |
| Формирователь однополосного сигнала | 1990 |
|
SU1753578A1 |
| УЛЬТРАЗВУКОВОЙ ФАЗОВЫЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2013 |
|
RU2568992C2 |
| ЦИФРОВОЙ ДЕТЕКТОР АМПЛИТУД | 2009 |
|
RU2423781C1 |
| Устройство для измерения фазовых сдвигов | 1986 |
|
SU1370597A1 |
| ДЕЛИТЕЛЬ ПОЛОСЫ ЧАСТОТ РЕЧЕВОГО СИГНАЛА | 2010 |
|
RU2439795C1 |
| СПОСОБ ДЕЛЕНИЯ ПОЛОСЫ ЧАСТОТ ПЕРЕДАВАЕМОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2259632C1 |
| Адаптивный демодулятор частотно-модулированных сигналов | 1985 |
|
SU1261081A1 |
| Устройство контроля комбинационных составляющих сигнала нелинейного четырехполюсника | 1985 |
|
SU1264111A1 |
| ЦИФРОВОЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1999 |
|
RU2153761C1 |