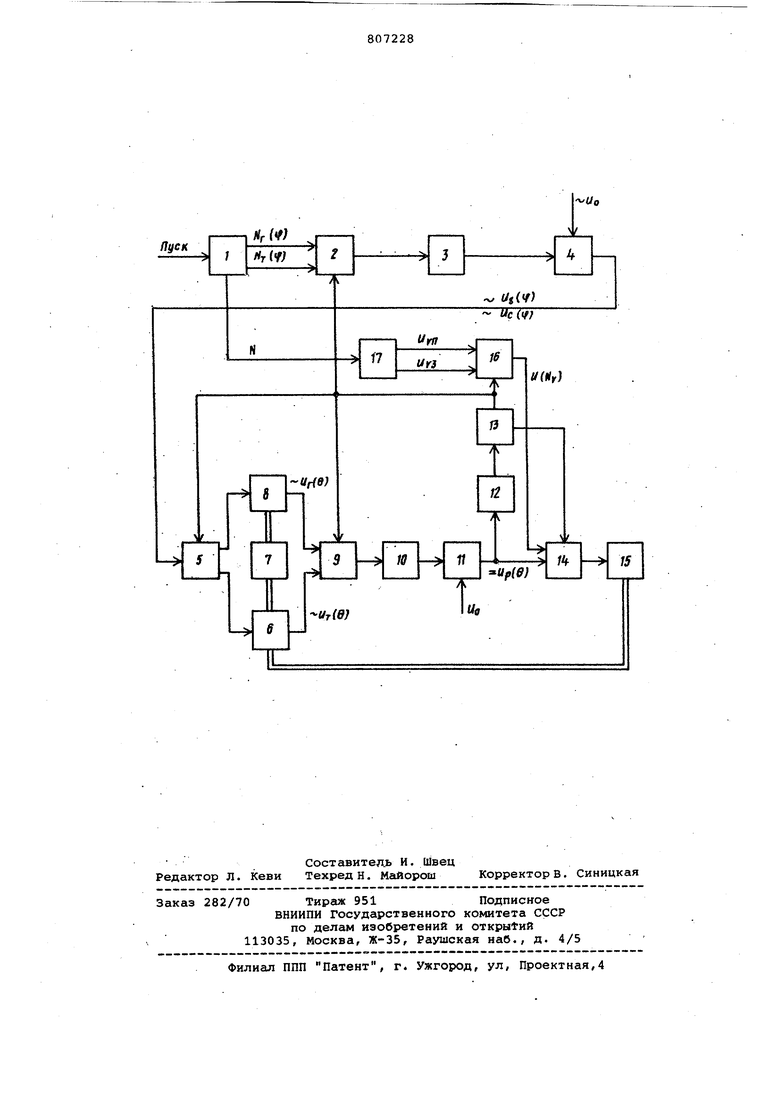
Изобретение относится к управлени и регулированию технологическими про цессами , в частности- предназначено для точностного позиционного itporргнвиного управления .исполнительными органами металлорежущего оборудования. Известна цифровая система позиционного регулирования, содержащая программно-задающее устройство,цифроаналоговый преобразователь,сумматор, первый блок допускового. контроля , выход которого подключен к первому входу блока сигнализации отказа системы., а второй вход - к выходу сигнализатора останова привода,выход цифроаналогобого. преобразователя через блок управления.соединен с двигат ем, выходной вал которого соединен с первым и вторым датчиками обратной связи, второй блок допускового контроля,, первый вход которого подключен к выходу сигнализатора останова привода, второй вход к выходу программно-задающего устройства, третий вход - к выходу, второго датчика обратной связи,а выход подключен к второму входу блока сигнализации l; . Наиболее близкой по технической сущности к предлагаемому.является-си тема позиционного, программного управления приводом.подач, содержаЩая генератор, устройство, ввода, дешифратор, выходами, соединенный с цифроаналоговыми, преобразователями грубого и точного отсчета, селекторные переключатели,. усилитель постоянного тока, нуль-орган, выпрямитель .и ..враща1С1Циеся .трансформа,торы 2.. применение двух блоков цифроаналоговых.преобразователей (одного для.кансша .грубого и другого для точного отсчетов) дорогостоящих технологически и сложных конструктивно,, например из-за нестандартных секционированньЬс трансформаторов, значительного.количества коммутирующих секций злементов - до 20 на один десятичный.разряд и другое, не способствует надежной работе системы,, а при отказе одного из цифроансшоговых преобразователей возможен брак обрабатываемой детали. Цель изобретения - упрощение и повышение надежности -системы. Поставленная цель.достигается тем, что в устройство позиционного программного управления, содержащее дешифратор, цифроангшоговый преобразователь, редуктор, кинематически соединенный с первым и вторьнл датчиками обратной связи, выходы которых через последовательно соединенные первый коммутатор, усилитель фаэочувствительный выпрямитель, и второй коммутатор соединены с входом привода подач, блок ввода информации, выход которого через последовательно соединенные задатчик скорости и третий коммутатор подключен к второму входу второго коммутатора, третий вход которого подключен к первому выходу селекторного переключателя, второй выход которого соединен с вторым входом третьего коммутатора и входом через нуль-орган с выходом фазочувствительного выпрямителя, введены четвертый и пятый коммутаторы, управлякжцие входы которых соединены с вторым выходом селекторного переклю чателя, информационные входы четвертого коммутатора подключены к вторым выходам блока ввода информации , а выход через последовательно соединенные дешифратор и цифроанапо говый преобразователь к информацион ному входу пятого KoivB TaTOpa, первый и второй выходы которого под ключены соответственно к входам пер - вого и второго датчиков обратной связи. На чертеже представлена блок-схе .ма устройства позиционного программного управления. Устройство содержит блок 1 ввода информации, четвертый коммутатор 2 каналов, деишфратор 3, цифроаналоговый преобразователь 4, пятый коммутатор 5 каналов, первый датчик б обратной связи, редуктор 7, второ датчик 8 обратной связи, первый коммутатор 9 каналов, усилитель 10 переменного тока, фазочувствительны выпрямитель 11, нуль-орган 12, селекторный переключатель 13,второй коммутатор 14, привод 15 подач, тре тий коммутатор 16 и задатчик 17 ско рости . Устройство работает следующим образом. С началом перемещения..исполнител ного органа станка от исходной позиции от блока 1 ввода информгщии коммутатор 2 каналов пропускает дис кретные сигналы в двоично-десятичной коде старших разрядов N,.(4) (где Ч - угол, пропорциональный заданному перемещению) на дешифратор 3, которые далее, пройдя через цифроаналоговый преобразователь 4, пре образуются в два аналоговых синусоидальных напряжения, модулированных по амплитуде по закону синуса Ug() и косинуса Uj; С), пропорционально заданномуперемещению и через комму ,татор 5 поступают на вход датчика 8 обратной связи грубого отсчета, например на соответствующие входные обмотки вращающегося трансформатора, с выхода которого (в указанном случае с выходной роторной обмотки) сигнал в той же форме, но пропорциональный по амплитуде углу рассогласования 0(где©-угол рассогласования) ме;хду заданным и отработанным перемещениями Uy. ( 0) поступает чеез коммутатор 9 л усилитель 10 пе- / ременного тока на фазочувствительный выпрямитель 11, с выхода которого сигнал уже постоянного тока с полярностью. Определяемой фазой заданного угла Ч кратной 180®, поступает на входы нуль-органа 12 и коммутатора 14. Одновременно с рабочим сигналом датчика обратной связи грубого отсчета от блока 1 ввода информации в канал скорости перемещения поступают дискретные сигнгшы Ну в двоично-десятичном коде и, пройдя через задатчик 17 скорости, преобразуются в два анёшоговых напряжения постоянного аока, первый из которых Uy, пропорционален по амплитуде заданной скорости перемещения,, а второй Uy - медленной (ползущей) скорости подхода к заданной точке. Сигнал Uy , пропорциональный заданной скорости, через коммутаторы 16 и 14 проходит на вход управления приводом 15 подач. При перемещении ис- полнительного органа станка к заданной точке привод работает в режиме управления по скорости и в разомкнутом по положению. При этом, на некотором расстоянии до конца пути (регулируется при настройке системы), не превышс1ххцем половины шага датчика 6 обратной связи точного отсчета сигнал и,. (J5) с датчика 8 обратной связи грубого отсчета уменьшается до установленного уровня зоны нечувствительности нуль-органа 12, с выхода которого, вследствие этого, поступает релейный сигнал в селекторный переключатель 13 и на его первом выходе появляется аналогичный сигнал/ поступающий на управляющие входы коммутаторов 2,5,9 и 16. В результате, коммутаторы 2 и 5 пропускают дискретные и аналоговые сигналы младших разрядов, коммутатор 9 переключае.т вход усилителя 10 переменного тока с выхода датчика 8 обратной связи грубого отсчета на выход датчика.6 обратной связи точного отсчетаг а через коммутаторы 16 и 14 подается на управление приводом 15 подач напряжение, пропорциональное ползущей скорости, образуя первую зону торможения, при этом через коммутатор 9, усилитель 10 переменного тока и фазочувствительный выпрямитель 11 на вход нуль-органа 12 вновь подается рабочий сигнал от датчика 6 обратной связи точного
отсчета. При приближении, к зайанной точке на- расстояние .(выбирается при настройке системы), не превышающее нескольких дискретных значений программируемого лути, сигнал.с.датчика 6 обратной связи.точного отсчета также уменьшается.до установленного уровня зоны нечувствительности нуль-органа 12, с выхода,которого повторный релейный сигнал посту пает в селекторный переключатель 13, вырабатывакядий релейный сигнал на своем втором выходе, который подается нд управляющий- вход коммутатора 14. Последний переключает. управлякщкй вход привода 15 подач, с выхода коммутатора 16 канала скорости на выход фазочувствительного выпрямителя 11,. образуя окончательную зону торможения привода в следящем режиме с датчика б обратной связи точного отсчета. Останов привода подач 15 фиксируется нуль-органом 12 и. селекторным переключателем 13 за счет другого установленного уровня зоны нечувствительности, нуль-органа 12, соответствующего зоне нечувствительности привода 15 подач, ввиду чего селекторным переключателем 13 шздается сигнал на выключение систем в момент точного останова исполнительного органа. Замена двух трансформаторных цифроаналоговых преобразователей одним в многоканальных системё1Х числового программного управления конструктивно упрощает систему и технологию ее изготовления, что повышает надежность ее работы. По предварительным подсчетам предлагаемое устройство позволяет снизить расходы по созданию его в 56 раз.
Формула изобретения Устройство позиционного программЛ4НОГО управления, содержащее дешифратор, дифроаналоговый.преобразователь, редуктор, кинематически соединенный, с первым и вторым датчиками Обратной связи, выходы которых через последовательно соединенные первый коммутатор, усилитель, фазочувствительный выпря митель и второй коммутатор соединены с входом привода подач, блок ввода.информации, выход которого через последовательно соединенные.задатчик скорости и
0 третий коммутатор подключен к второму входу второго. KOMMj/татора,третий вход которого подключен к первому выходу селекторного переключателя, : второй выход которого соединен с вто5рым входом третьего коммутатора и входом через нуль-орган с выходом фазочувствительного вь1прямителя, :отл,и чающееся тем, что, с целью повышения надежности и упро0щения устройства, в него введены четвертый и пятый коммутаторы, управляющие входы KOTOE&ix соединены с вторым выходом .селекторного переключателя, информационные входы четвертого коммутатора подключены к
5 вторым выходам блока, ввода информации, а выход через последовательно соединенные дешифратор и цифроаналоговый преобразователь к информационному, входу пятого кс мутатора,
0 первый и второй выходы которого под| лючены соответственно к входгш первого и второго датчиков обратной связи.
5
Источники информации, принятые во. внимание при экспертизе 1. Авторское свидетельство СССР J 5 57353, кл. G 05 В 19/18, 1976. 2. Лещенхо В.А. Гидравлические
0 следящие прийводы станков с программным управлением, М., Мгиииностроение, 1975, с. 57 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимый функциональный преобразователь код-частотно-временной сигнал | 1980 |
|
SU894746A1 |
| Устройство для управления следящим приводом | 1976 |
|
SU703781A1 |
| Устройство для автоматического измерения сопротивления заземления | 1983 |
|
SU1128195A1 |
| Устройство воспроизведения изображений в условных цветах | 1980 |
|
SU932652A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Устройство динамической индикации времени суток и календаря | 1979 |
|
SU792209A2 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1978 |
|
SU798911A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |